【深入浅出PyTorch】--3.2.PyTorch组成模块2
在深度学习模型的训练中,权重的初始值极为重要。一个好的初始值,会使模型收敛速度提高,使模型准确率更精确。一般情况下,我们不使用全0初始值训练网络。为了利于训练和减少收敛时间,我们需要对模型进行合理的初始化。PyTorch也在torch.nn.init中为我们提供了常用的初始化方法。 通过本章学习,你将学习到以下内容:
-
常见的初始化函数
-
初始化函数的使用
目录
1.初始化函数
1.1.初始化函数的封装
2.损失函数
2.1.二分类交叉熵损失
2.2.交叉熵损失函数
2.3.其他损失函数
3.训练与验证
3.1.训练
3.2.验证
4.优化算法
4.1.Optimizer属性
4.2.Optimizer方法
1.初始化函数
torch.nn.init 是 PyTorch 中用于神经网络参数(如权重、偏置)初始化的工具模块。它提供了一系列函数,用于对 torch.Tensor (张量)对象进行不同策略的初始化。
核心特点:
- 原地操作 (In-place):除了
calculate_gain,所有初始化函数的名称都带有下划线后缀(如uniform_)。这表示它们会直接修改输入的张量(tensor)的值,而不是返回一个新的张量。 - 目的:合理的初始化可以加速模型收敛,避免梯度消失或爆炸等问题。
以下是 torch.nn.init 提供的主要初始化函数:
| 函数名 | 描述 | 关键参数 |
|---|---|---|
uniform_(tensor, a=0.0, b=1.0) | 从均匀分布 U(a, b) 中采样来初始化张量。 | a, b: 分布的上下界。 |
normal_(tensor, mean=0.0, std=1.0) | 从正态分布 N(mean, std) 中采样来初始化张量。 | mean, std: 均值和标准差。 |
constant_(tensor, val) | 将张量的所有元素填充为一个常数 val。 | val: 要填充的常数值。 |
ones_(tensor) | 将张量的所有元素填充为 1。 | 无 |
zeros_(tensor) | 将张量的所有元素填充为 0。 | 无 |
eye_(tensor) | 为 2D 张量创建一个单位矩阵。对于更高维张量,最内层的两个维度构成单位矩阵,其余元素为 0。 | 无 |
dirac_(tensor, groups=1) | 为卷积层的权重初始化,使得初始时网络为恒等映射(仅适用于 3D, 4D, 5D 的 tensor)。 | groups: 卷积分组数。 |
xavier_uniform_(tensor, gain=1.0) | Xavier/Glorot 均匀初始化。从以 0 为中心,[-limit, limit] 为范围的均匀分布中采样,其中 limit = gain * sqrt(6 / (fan_in + fan_out))。 | gain: 缩放因子。 |
xavier_normal_(tensor, gain=1.0) | Xavier/Glorot 正态初始化。从均值为 0,标准差为 gain * sqrt(2 / (fan_in + fan_out)) 的正态分布中采样。 | gain: 缩放因子。 |
kaiming_uniform_(tensor, a=0, mode='fan_in', nonlinearity='leaky_relu') | Kaiming/He 均匀初始化。常用于 ReLU 及其变体激活函数的网络。 | a: 负斜率(用于 leaky_relu),mode: 'fan_in' 或 'fan_out',nonlinearity: 激活函数名。 |
kaiming_normal_(tensor, a=0, mode='fan_in', nonlinearity='leaky_relu') | Kaiming/He 正态初始化。与 kaiming_uniform_ 类似,但从正态分布采样。 | 参数同上。 |
orthogonal_(tensor, gain=1) | 生成一个(半)正交矩阵来初始化张量。对于非方阵,会进行奇异值分解(SVD)并用得到的正交基初始化。对 RNN 非常有效。 | gain: 应用于正交矩阵的缩放因子。 |
sparse_(tensor, sparsity, std=0.01) | 将张量初始化为一个稀疏矩阵。每个行向量中,有 sparsity 比例的元素被设置为 0,其余元素从 N(0, std) 中采样。 | sparsity: 稀疏度(0-1 之间),std: 非零元素分布的标准差。 |
增益计算 (Gain Calculation)
calculate_gain(nonlinearity, param=None) |
|---|
功能:计算给定非线性激活函数(nonlinearity)的推荐增益(gain)值。这个值通常作为 xavier_* 和 kaiming_* 等初始化方法的 gain 参数传入,以获得更合适的初始化尺度。 |
常见非线性函数的增益值表
非线性函数 (nonlinearity) | 增益 (Gain) |
|---|---|
Linear / Identity | 1 |
Conv{1,2,3}D | 1 |
Sigmoid | 1 |
Tanh | 5/3 ≈ 1.6667 |
ReLU | √2 ≈ 1.4142 |
Leaky ReLU | √(2 / (1 + neg_slope²)) |
说明:
Leaky ReLU的增益取决于其负斜率neg_slope。例如,当neg_slope=0.01时,增益约为 1.4141。- 使用
calculate_gain函数可以方便地获取这些值,例如:gain = torch.nn.init.calculate_gain('relu')。
具体每一层设计的参数可以看上一章:
https://blog.csdn.net/qq_58602552/article/details/152280344?spm=1001.2014.3001.5501
举个例子:
import torch
import torch.nn as nn# 定义一个卷积层
conv = nn.Conv2d(1, 3, 3) # 输入通道1,输出通道3,卷积核大小3x3
# 定义一个全连接(线性)层
linear = nn.Linear(10, 1) # 输入维度10,输出维度1# 检查 conv 是否是 nn.Conv2d 类型
print(isinstance(conv, nn.Conv2d)) # 输出: True
# 检查 linear 是否是 nn.Conv2d 类型
print(isinstance(linear, nn.Conv2d)) # 输出: Falseprint(conv.weight.data)
print(linear.weight.data)# 对conv进行kaiming初始化
torch.nn.init.kaiming_normal_(conv.weight.data)
print(conv.weight.data)
# 对linear进行常数初始化
torch.nn.init.constant_(linear.weight.data,0.3)
print(linear.weight.data)
# #输出偏置项
# print(conv.bias.data)
# print(linear.bias.data)1.1.初始化函数的封装
人们常常将各种初始化方法定义为一个initialize_weights()的函数并在模型初始后进行使用。
def initialize_weights(model):for m in model.modules():# 判断是否属于Conv2dif isinstance(m, nn.Conv2d):torch.nn.init.zeros_(m.weight.data)# 判断是否有偏置if m.bias is not None:torch.nn.init.constant_(m.bias.data,0.3)elif isinstance(m, nn.Linear):torch.nn.init.normal_(m.weight.data, 0.1)if m.bias is not None:torch.nn.init.zeros_(m.bias.data)elif isinstance(m, nn.BatchNorm2d):m.weight.data.fill_(1) m.bias.data.zeros_() 这段代码流程是遍历当前模型的每一层,然后判断各层属于什么类型,然后根据不同类型层,设定不同的权值初始化方法。我们可以通过下面的例程进行一个简短的演示:
# 模型的定义
class MLP(nn.Module):# 声明带有模型参数的层,这里声明了两个全连接层def __init__(self, **kwargs):# 调用MLP父类Block的构造函数来进行必要的初始化。这样在构造实例时还可以指定其他函数super(MLP, self).__init__(**kwargs)self.hidden = nn.Conv2d(1,1,3)self.act = nn.ReLU()self.output = nn.Linear(10,1)# 定义模型的前向计算,即如何根据输入x计算返回所需要的模型输出def forward(self, x):o = self.act(self.hidden(x))return self.output(o)mlp = MLP()
print(mlp.hidden.weight.data)
print("-------初始化-------")mlp.apply(initialize_weights)
# 或者initialize_weights(mlp)
print(mlp.hidden.weight.dat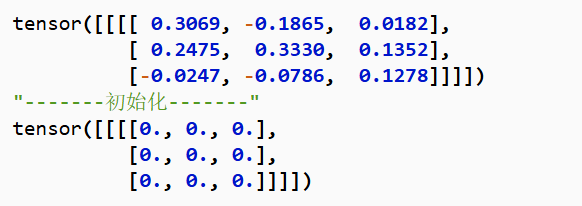
注意: 我们在初始化时,最好不要将模型的参数初始化为0,因为这样会导致梯度消失,从而影响模型的训练效果。因此,我们在初始化时,可以使用其他初始化方法或者将模型初始化为一个很小的值,如0.01,0.1等。
2.损失函数
在深度学习广为使用的今天,我们可以在脑海里清晰的知道,一个模型想要达到很好的效果需要学习,也就是我们常说的训练。一个好的训练离不开优质的负反馈,这里的损失函数就是模型的负反馈。
所以在PyTorch中,损失函数是必不可少的。它是数据输入到模型当中,产生的结果与真实标签的评价指标,我们的模型可以按照损失函数的目标来做出改进。
下面我们将开始探索PyTorch的所拥有的损失函数。这里将列出PyTorch中常用的损失函数(一般通过torch.nn调用),并详细介绍每个损失函数的功能介绍、数学公式和调用代码。当然,PyTorch的损失函数还远不止这些,在解决实际问题的过程中需要进一步探索、借鉴现有工作,或者设计自己的损失函数。
经过本节的学习,你将收获:
-
在深度学习中常见的损失函数及其定义方式
-
PyTorch中损失函数的调用
2.1.二分类交叉熵损失
torch.nn.BCELoss(weight=None, size_average=None, reduce=None, reduction='mean')
计算预测值和真实值的一个差距.
功能:计算二分类任务时的交叉熵(Cross Entropy)函数。在二分类中,label是{0,1}。对于进入交叉熵函数的input为概率分布的形式。一般来说,input为sigmoid激活层的输出,或者softmax的输出。
| 参数名 | 类型 | 说明 |
|---|---|---|
| weight | Tensor 或 None | 一个手动重新缩放每个批次元素损失的张量。它通常是一个包含每个类别权重的 1D 张量,用于处理类别不平衡问题。如果指定,必须是 Tensor 类型。 |
bool | True,则损失将对 batch size 求平均。 | |
bool | size_average 进行归约(reduction)。 | |
| reduction | str | 指定应用于输出的归约方式。可选值为:'none':不进行归约,返回原始 loss;'mean':返回所有 loss 的平均值;'sum':返回所有 loss 的总和。此参数取代了已弃用的 size_average 和 reduce。 |
import torch
import torch.nn as nnm = nn.Sigmoid()
loss = nn.BCELoss()input = torch.randn(3, requires_grad=True)
target = torch.empty(3).random_(2)output = loss(m(input), target)
print(output)
print(output.backward())2.2.交叉熵损失函数
torch.nn.CrossEntropyLoss(weight=None, size_average=None, ignore_index=-100, reduce=None, reduction='mean')
| 参数名 | 类型 | 默认值 | 说明 |
|---|---|---|---|
| weight | Tensor 或 None | None | 手动赋予每个类别的权重,形状为 (C,)。常用于处理类别不平衡问题。例如:weight=torch.tensor([1.0, 2.0, 1.0]) 给第2类更高权重。 |
| ignore_index | int | -100 | 指定一个目标值,该值对应的 loss 不参与梯度计算且不影响平均。常用于忽略 padding 或无效标签(如语义分割中的“背景”或 NLP 中的 <pad>)。 |
| reduction | str | 'mean' | 损失的归约方式: • 'none':不归约,返回每个样本的 loss(形状 (N,))• 'mean':返回所有非忽略样本 loss 的平均值• 'sum':返回所有非忽略样本 loss 的总和 |
| label_smoothing | float | 0.0 | 标签平滑系数,范围 [0, 1]。用于防止模型对预测过于自信,提升泛化能力。当 α > 0 时,真实标签概率从 1 变为 1-α,其余类别均匀分配 α/(C-1)。 |
import torch
import torch.nn as nn# 定义损失函数
criterion = nn.CrossEntropyLoss()# 假设 batch_size=2, num_classes=3
logits = torch.randn(2, 3, requires_grad=True)
# 示例 logits: tensor([[ 1.2, -0.5, 0.3],
# [-0.8, 1.0, 0.6]])target = torch.tensor([0, 2]) # 真实类别:第一个样本属于类0,第二个属于类2# 计算损失
loss = criterion(logits, target)
print("Loss:", loss.item())# 反向传播
loss.backward()
print("Gradient on logits:\n", logits.grad)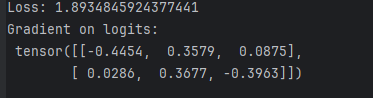
2.3.其他损失函数
| 损失函数名称 | 类名 | 功能描述 | 计算公式(简化) |
|---|---|---|---|
| L1 损失 | nn.L1Loss() | 计算预测值与真实值之间绝对误差 | |
| MSE 损失 | nn.MSELoss() | 计算预测值与真实值之间平方误差 | |
| 平滑 L1 损失 | nn.SmoothL1Loss(beta=1.0) | L1 的平滑版本,对离群点更鲁棒 |  |
| 泊松负对数似然损失 | nn.PoissonNLLLoss(log_input=True, full=False, eps=1e-8) | 用于泊松分布回归任务 | 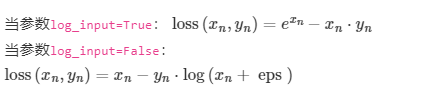 |
| KL 散度损失 | nn.KLDivLoss(log_target=False) | 衡量两个概率分布之间的相对熵 | 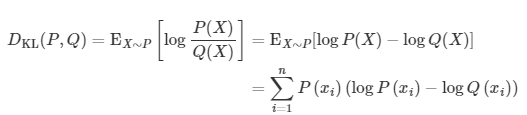 |
| Margin Ranking Loss | nn.MarginRankingLoss(margin=0.0) | 用于排序任务,衡量两样本相似性 |  |
| 多标签边界损失 | nn.MultiLabelMarginLoss() | 多标签分类任务中的 Hinge 损失 | |
| 二分类 Soft Margin 损失 | nn.SoftMarginLoss() | 二分类 logistic 损失,基于 sigmoid |  |
| 多分类折页损失 | nn.MultiMarginLoss(p=1, margin=1.0, weight=None) | 多分类 hinge loss | 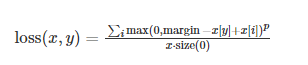 |
| 三元组损失 | nn.TripletMarginLoss(margin=1.0, p=2) | 学习样本间距离度量(anchor, positive, negative) | 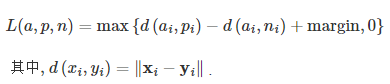 |
| Hinge Embedding Loss | nn.HingeEmbeddingLoss(margin=1.0) | 对嵌入向量进行 hinge 损失计算 |
输入x应为两个输入之差的绝对值 |
| 余弦相似度损失 | nn.CosineEmbeddingLoss(margin=0.0) | 基于余弦距离衡量两个向量相似性 | 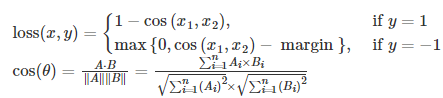 |
| CTC 损失 | nn.CTCLoss(blank=0, zero_infinity=False) | 用于时序数据(如语音、OCR),处理输入输出对齐问题 | 对输入和目标的可能排列的概率进行求和,产生一个损失值,这个损失值对每个输入节点来说是可分的 |
3.训练与验证
我们在完成了模型的训练后,需要在测试集/验证集上完成模型的验证,以确保我们的模型具有泛化能力、不会出现过拟合等问题。在PyTorch中,训练和评估的流程是一致的,只是在训练过程中需要将模型的参数进行更新,而在评估过程中则不需要更新参数。
经过本节的学习,你将收获:
-
PyTorch的训练/评估模式的开启
-
完整的训练/评估流程
完成了上述设定后就可以加载数据开始训练模型了。首先应该设置模型的状态:如果是训练状态,那么模型的参数应该支持反向传播的修改;如果是验证/测试状态,则不应该修改模型参数。在PyTorch中,模型的状态设置非常简便,如下的两个操作二选一即可:
model.train() # 训练状态 model.eval() # 验证/测试状态
3.1.训练
一个完整的图像分类的训练过程如下所示:
def train(epoch):# 将模型设置为训练模式,启用 BatchNorm 和 Dropout 等训练专用层model.train()# 初始化当前轮次的总损失为0train_loss = 0# 遍历训练数据加载器,获取每个批次的数据和对应标签for data, label in train_loader:# 将输入数据和标签移动到GPU上进行加速计算data, label = data.cuda(), label.cuda()# 清空优化器中上一步的梯度信息,避免梯度累积optimizer.zero_grad()# 前向传播:将数据输入模型,得到输出结果output = model(data)# 计算当前批次输出与真实标签之间的损失值loss = criterion(output, label)# 反向传播:计算梯度loss.backward()# 更新模型参数optimizer.step()# 累加当前批次的损失值(乘以样本数量,用于后续计算平均损失)train_loss += loss.item() * data.size(0)# 计算整个训练集上的平均损失train_loss = train_loss / len(train_loader.dataset)# 打印当前轮次和训练损失,保留6位小数print('Epoch: {} \tTraining Loss: {:.6f}'.format(epoch, train_loss))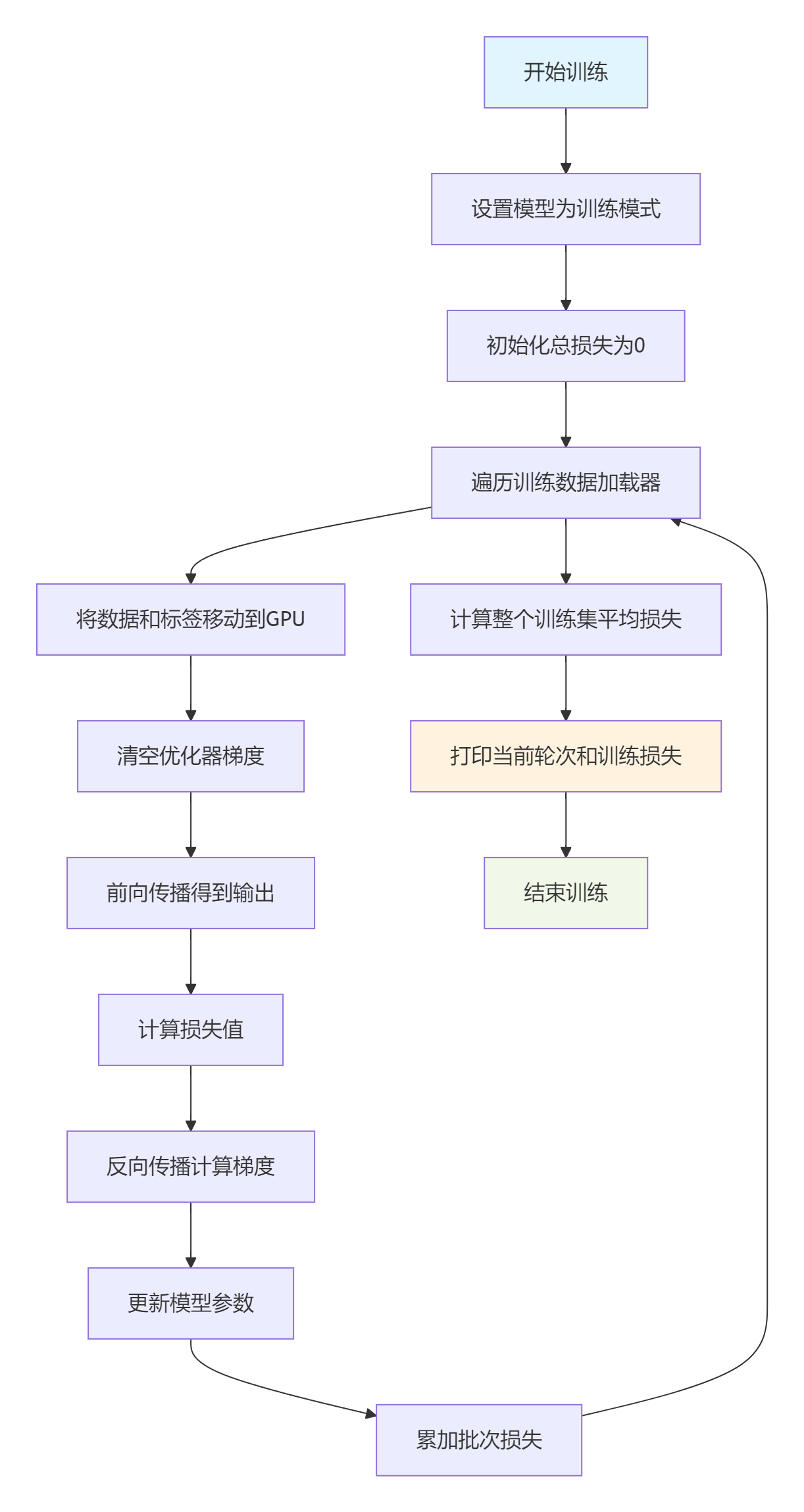
3.2.验证
对应的,一个完整图像分类的验证过程如下所示:
def val(epoch): # 将模型设置为评估模式(关闭 Dropout、BatchNorm 等的训练行为)model.eval()# 初始化验证阶段的总损失为 0val_loss = 0# 使用 torch.no_grad() 上下文管理器,禁用梯度计算,节省内存并加快推理速度with torch.no_grad():# 遍历验证数据加载器(val_loader),获取每个批次的数据和标签for data, label in val_loader:# 将输入数据和标签移动到 GPU 上(如果可用)data, label = data.cuda(), label.cuda()# 将数据输入模型,得到输出(通常是类别 logits)output = model(data)# 对输出取每一行最大值的索引,得到预测的类别标签preds = torch.argmax(output, 1)# 计算当前批次的损失值loss = criterion(output, label)# 累加当前批次的损失值(乘以该批次样本数量,用于后续计算平均损失)val_loss += loss.item() * data.size(0)# 累加正确预测的数量(注意:这里变量 running_accu 未定义,应为错误!)# 正确写法应是先定义 running_accu = 0,或使用其他变量如 running_correctsrunning_accu += torch.sum(preds == label.data)# 计算整个验证集上的平均损失:总损失 / 验证集样本总数val_loss = val_loss / len(val_loader.dataset)# 打印当前 epoch 的验证损失(注意:这里写的是 "Training Loss",应为笔误)# 建议改为 "Validation Loss"print('Epoch: {} \tTraining Loss: {:.6f}'.format(epoch, val_loss))对于图像分类任务,我们还可以使用sklearn.metrics中的classification_report函数来计算模型的准确率、召回率、F1值等指标,如下所示:
from sklearn.metrics import classification_report
"""
将下方代码的labels和preds替换为模型预测出来的所有label和preds,
target_names替换为类别名称,
既可得到模型的分类报告
"""
print(classification_report(labels.cpu(), preds.cpu(), target_names=class_names))除此之外,我们还可以使用torcheval或torchmetric来对模型进行评估。
4.优化算法
深度学习的目标是通过不断改变网络参数,使得参数能够对输入做各种非线性变换拟合输出,本质上就是一个函数去寻找最优解,只不过这个最优解是一个矩阵,而如何快速求得这个最优解是深度学习研究的一个重点,以经典的resnet-50为例,它大约有2000万个系数需要进行计算,那么我们如何计算出这么多系数,有以下两种方法:
-
第一种是直接暴力穷举一遍参数,这种方法从理论上行得通,但是实施上可能性基本为0,因为参数量过于庞大。
-
为了使求解参数过程更快,人们提出了第二种办法,即BP+优化器逼近求解。
因此,优化器是根据网络反向传播的梯度信息来更新网络的参数,以起到降低loss函数计算值,使得模型输出更加接近真实标签。
经过本节的学习,你将收获:
-
了解PyTorch的优化器
-
学会使用PyTorch提供的优化器进行优化
-
优化器的属性和构造
-
优化器的对比
也就是找到损失最小,准确率最高,一般都是前向传播+反向传播+优化算法
PyTorch很人性化的给我们提供了一个优化器的库torch.optim,在这里面提供了多种优化器。
-
torch.optim.SGD
-
torch.optim.ASGD
-
torch.optim.Adadelta
-
torch.optim.Adagrad
-
torch.optim.Adam
-
torch.optim.AdamW
-
torch.optim.Adamax
-
torch.optim.RAdam
-
torch.optim.NAdam
-
torch.optim.SparseAdam
-
torch.optim.LBFGS
-
torch.optim.RMSprop
-
torch.optim.Rprop
以上这些优化算法均继承于Optimizer,下面我们先来看下所有优化器的基类Optimizer。定义如下:
class Optimizer(object):def __init__(self, params, defaults): self.defaults = defaultsself.state = defaultdict(dict)self.param_groups = []4.1.Optimizer属性
| 名称 | 类型 | 描述 |
|---|---|---|
param_groups | list of dict | 存储优化器管理的参数组列表。每个参数组是一个字典,包含 'params'(参数列表)和其他超参数(如 lr, momentum 等)。这是与参数交互的核心结构。 |
state | dict | 存储每个参数的状态信息(如动量缓冲区、历史梯度等)。键通常是参数对象(Parameter),值是包含状态张量的字典。不同优化器(如 Adam、SGD)在此存储不同的状态变量。 |
defaults | dict | 存储优化器的默认超参数。在初始化参数组时,未指定的超参数会从 {'lr': 0.1, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'nesterov': False} |
4.2.Optimizer方法
__init__(self, params, defaults) | 构造函数 | 初始化优化器。输入 params(可迭代的 Parameter 对象或参数组),并设置 defaults。负责构建 param_groups 和初始化 state。 |
zero_grad(set_to_none=False) | 方法 | 将所有被管理参数的梯度置零。set_to_none=True 时将 grad 属性设为 None(节省内存,推荐使用)。 |
step(closure=None) | 抽象方法 | 核心优化步骤。执行一次参数更新。closure 是一个可选的无参函数,用于重新计算损失(在需要重新前向传播的场景,如 L-BFGS 中使用)。子类必须实现此方法。 |
add_param_group(param_group) | 方法 | 向优化器动态添加一个新的参数组 param_group(字典,包含 'params' 和超参数)。用于在训练中为新层或不同超参数的层添加优化。 |
state_dict() | 方法 | 返回优化器的状态字典,包含 state 和 param_groups。用于保存优化器状态(如检查点)。 |
load_state_dict(state_dict) | 方法 | 从 state_dict() 返回的字典加载优化器状态。确保模型结构和参数未改变,否则可能出错。 |
其他方法:
__getstate__() | 魔法方法 | 定义对象被 pickle 序列化时的行为。通常用于支持 torch.save。 |
__setstate__(state) | 魔法方法 | 定义对象被 pickle 反序列化时的行为。通常用于支持 torch.load。 |
__repr__() | 魔法方法 | 返回优化器的字符串表示,便于调试和打印。 |
share_memory() | 方法 | (较少使用)将优化器状态张量移动到共享内存,支持多进程训练。 |
__class__, __dict__ 等 | 内置属性 | Python 对象的标准属性,用于反射和元编程。 |
import os
import torch# 设置权重:创建一个 2x2 的张量,从标准正态分布中采样,并开启梯度追踪
weight = torch.randn((2, 2), requires_grad=True)# 手动设置梯度:将 weight 的梯度设为全 1 的 2x2 矩阵
weight.grad = torch.ones((2, 2))# 输出更新前的权重数据和梯度
print("更新前的权重数据(weight.data):\n{}".format(weight.data))
print("当前梯度(weight.grad):\n{}".format(weight.grad))# 实例化 SGD 优化器
# 传入参数列表 [weight],设置学习率 lr=0.1,动量 momentum=0.9
optimizer = torch.optim.SGD([weight], lr=0.1, momentum=0.9)# 执行一步优化:根据当前梯度和动量更新参数
optimizer.step()# 查看执行 step 后的权重数据和梯度(注意:step 不会清空 grad)
print("执行 optimizer.step() 后的权重数据(weight.data):\n{}".format(weight.data))
print("梯度仍未清零(weight.grad):\n{}".format(weight.grad))# 清零梯度:将所有被优化器管理的参数的梯度置为零(或 None)
optimizer.zero_grad()# 检查梯度是否已清零
print("执行 optimizer.zero_grad() 后的梯度(应为全 0):\n{}".format(weight.grad))# 输出优化器的参数组信息(param_groups)
# 包含学习率、动量等超参数及参数列表
print("optimizer.param_groups 是:\n{}".format(optimizer.param_groups))# 检查 weight 是否是同一个对象(通过内存地址 id 判断)
# 输出优化器内部保存的参数与原始 weight 的内存地址
print("优化器中的 weight 地址: {}".format(id(optimizer.param_groups[0]['params'][0])))
print("外部定义的 weight 地址: {}".format(id(weight)))
print("两者是否为同一对象: {}".format(id(optimizer.param_groups[0]['params'][0]) == id(weight)))
print("说明:优化器直接引用原始参数,而非复制,因此共享同一内存对象。\n")# 新增第二个参数 weight2
weight2 = torch.randn((3, 3), requires_grad=True)# 向优化器动态添加新的参数组
# 设置该组的学习率更低(lr=0.0001),并启用 Nesterov 动量
optimizer.add_param_group({"params": weight2, 'lr': 0.0001, 'nesterov': True})# 查看添加新参数后的 param_groups
print("添加 weight2 后的 optimizer.param_groups 是:\n{}".format(optimizer.param_groups))# 获取优化器当前的状态字典(包含 param_groups 和 state)
opt_state_dict = optimizer.state_dict()
print("调用 step 前的 state_dict:\n", opt_state_dict)# 连续执行 50 次优化步骤(模拟训练过程)
# 注意:由于没有真实损失函数和反向传播,梯度仍保持为初始值或未更新
# 实际中应在每次 step 前进行 loss.backward() 和 zero_grad()
for _ in range(50):optimizer.step()# 查看多次更新后的状态字典(动量状态已被累积更新)
print("执行 50 次 step 后的 state_dict:\n", optimizer.state_dict())# 保存优化器状态到本地文件
save_path = os.path.join(r"D:\pythonProject\深度学习\pytorch\基础学习\优化器", "optimizer_state_dict.pkl")
torch.save(optimizer.state_dict(), save_path)
print("✅ 优化器状态已保存至:", save_path)# 加载之前保存的优化器状态
loaded_state_dict = torch.load(save_path)
optimizer.load_state_dict(loaded_state_dict)
print("✅ 成功加载优化器状态")
print("加载的状态字典内容:\n", loaded_state_dict)# 最后输出优化器的关键属性信息# defaults: 优化器的默认超参数配置
print("\n--- optimizer.defaults(默认超参数)---")
print(optimizer.defaults)# state: 存储每个参数的优化状态(如动量缓冲区)
print("\n--- optimizer.state(参数状态缓存)---")
print(optimizer.state)
# 提示:state 的键是参数对象,值是状态字典(如 'momentum_buffer')# param_groups: 当前所有参数组的配置
print("\n--- optimizer.param_groups(参数组配置)---")
print(optimizer.param_groups)print("\n🎉 程序执行完毕")