第一章 :感知机(上)
1 感知机
1.1感知机的起源
在人工智能发展的历史长河中,感知机占据着举足轻重的地位。1943 年,心理学家 Warren McCulloch 和数理逻辑学家 Walter Pitts 在《A logical calculus of the ideas immanent in nervous activity》论文中首次提出了人工神经元的数学模型,开创了人工神经网络研究的时代。1949 年,心理学家唐纳德・赫布在《The Organization of Behavior》中提出了著名的赫布学习规则,为神经网络的学习机制奠定了生物学基础
在此基础上,美国神经学家 Frank Rosenblatt 于 1957 年在康奈尔航空实验室提出了感知机模型,并成功在 IBM 704 计算机上完成了仿真。1958 年,Rosenblatt 在《The Perceptron: A Probabilistic Model for Information Storage and Organization in the Brain》一文中首次公开发表了感知机的研究成果。这一突破性进展被美国海军研究办公室誉为 "第一台能够拥有人类思想的机器"在当时引起了巨大轰动。

图 1弗兰克·罗森布拉特和他的感知机
感知机的提出具有划时代的意义。作为第一个可以学习的线性分类器,感知机能够实现简单的逻辑运算,如 "与"、"或" 等。1960 年 6 月 23 日,Rosenblatt 展示了 Mark I 感知机,这是第一台能够 "学习" 识别和识别光学模式的机器。1962 年,Rosenblatt 出版了《Principles of Neurodynamics: Perceptrons and the theory of brain mechanisms》一书,深入阐述了感知机的理论知识和背景假设,其中包含了重要的感知机收敛定理。
图 2在康奈尔航空实验室内,一名工作人员在调节Mark I 感知机中的电线和光线感应器
然而,感知机的发展并非一帆风顺。1969 年,人工智能先驱 Marvin Minsky 和 Seymour Papert 在《Perceptrons》一书中仔细分析了单层神经网络系统的功能及局限性,证明感知机无法解决简单的异或(XOR)等线性不可分问题。这本书的发表导致了人工神经网络领域长达近 20 年的发展停滞,直到 1986 年反向传播算法的提出,神经网络研究才重新焕发生机。
尽管存在局限性,感知机作为神经网络的基础模型,其重要性不容忽视。现代深度学习中的多层感知机、卷积神经网络、循环神经网络等复杂模型,都是在感知机的基础上发展而来的。理解感知机的工作原理,对于掌握现代机器学习算法具有重要的基础意义。本文将从数学原理、算法实现、应用案例等多个维度,全面解析感知机的工作机制,为机器学习初学者提供深入的理论指导。
1.2感知机的基本概念
1.2.1生物神经元的数学抽象
感知机的设计灵感直接来源于生物神经元的工作机制。生物神经元是神经系统的基本组成单位,其结构包括树突、突触、细胞体和轴突。树突负责接收来自其他神经元的输入信号,这些信号通过突触传递到细胞体。细胞体对所有输入信号进行综合处理,当信号强度超过某个阈值时,神经元被激活,产生电脉冲并通过轴突传递给其他神经元。
这种 "全或无" 的激活机制启发了人工神经元的数学建模。感知机将生物神经元的复杂行为简化为一个数学函数,通过权重向量和偏置参数来模拟突触的连接强度和神经元的激活阈值。在感知机模型中,输入信号首先与对应的权重相乘,然后求和并加上偏置,最后通过激活函数产生输出。这种简化虽然忽略了生物神经元的许多复杂特性,但保留了其核心的信息处理机制。
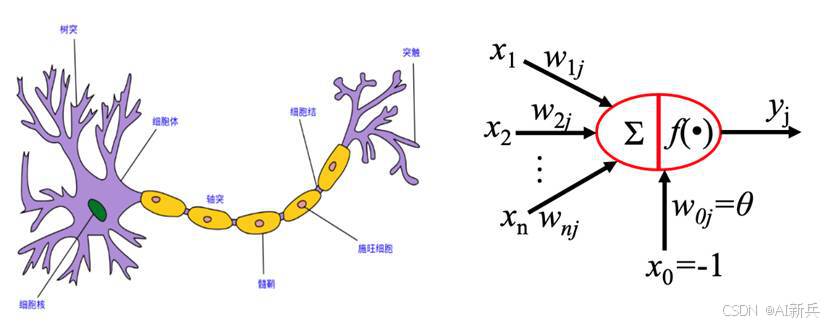
图 3神经元与感知机
1.2.2感知机的基本结构
感知机的基本结构包含以下核心元素:输入向量 x=(x₁,x₂,...,xₙ)、突触权重 w=(w₁,w₂,...,wₙ)、偏置 b、激活函数 sign (・) 和输出 y。在实际应用中,感知机可以表示为一个简单的数学公式:y = sign (w・x + b),其中 w・x 表示向量的点积运算。
从数学角度看,感知机是一个线性分类器,它通过一个超平面将特征空间划分为两个区域。在二维空间中,这个超平面退化为一条直线;在三维空间中,它是一个平面;在更高维的空间中,它被称为超平面。感知机的目标就是找到这样一个超平面,使得所有正样本和负样本分别位于超平面的两侧。
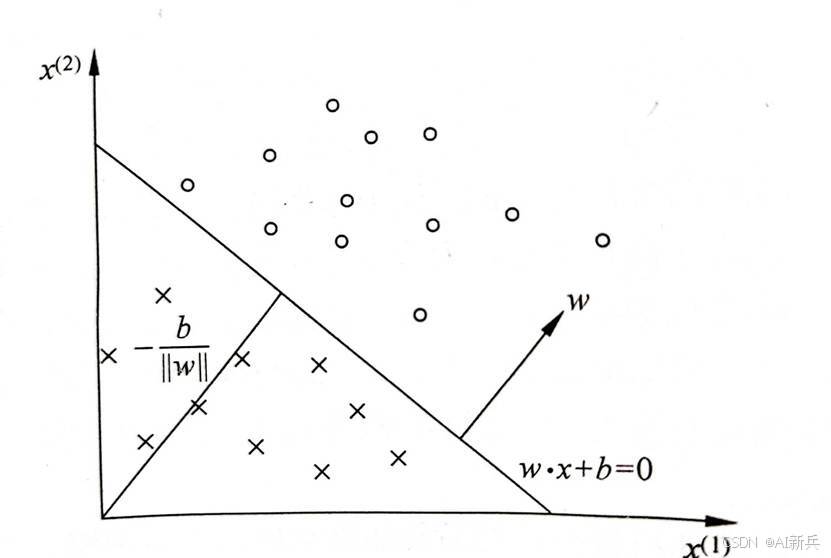
图 4感知机是一个线性分类器
1.2.3感知机的功能特性
感知机作为最简单的人工神经网络,具有以下几个重要特性:
线性可分性:感知机只能处理线性可分的数据,即存在一个超平面能够将正负样本完全分开的数据。这是感知机的根本限制,也是后续所有改进模型试图突破的瓶颈。
二分类能力:感知机本质上是一个二分类器,输出结果只能是 0 或 1(或 - 1 和 1)。这种简单的输出形式使得感知机能够直接对应逻辑运算,如与门、或门、非门等。
学习能力:感知机具有自学习能力,能够通过训练数据调整权重和偏置参数,逐步提高分类准确率。这种学习过程基于误差驱动的原则,通过不断修正错误来改进模型性能。
可解释性:与现代深度学习模型相比,感知机具有良好的可解释性。权重向量直接反映了各个特征对分类结果的影响程度,偏置则决定了分类边界的位置。