ORB_SLAM2原理及代码解析:SetPose() 函数
1作用
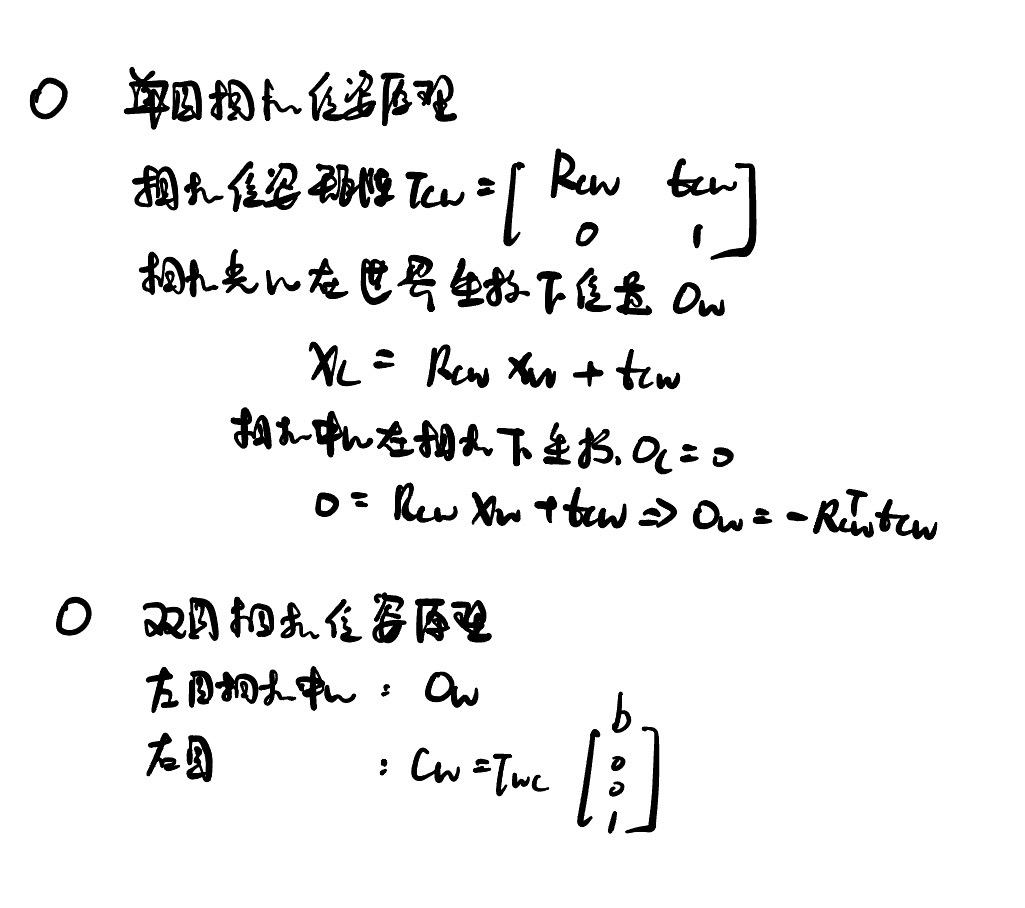
帧或关键帧的光心求解。
2 所属位置及代码
2.1 Frame::SetPose()
(1)声明:
include/Frame.h// Set the camera pose.void SetPose(cv::Mat Tcw);(2)定义:
src/Frame.ccvoid Frame::SetPose(cv::Mat Tcw) {mTcw = Tcw.clone();UpdatePoseMatrices(); }void Frame::UpdatePoseMatrices() { mRcw = mTcw.rowRange(0,3).colRange(0,3);mRwc = mRcw.t();mtcw = mTcw.rowRange(0,3).col(3);mOw = -mRcw.t()*mtcw; }
2.2 KeyFrame::SetPose()
(1)声明:include/KeyFrame.h
// Pose functionsvoid SetPose(const cv::Mat &Tcw);(2)定义:src/KeyFrame.cc
void KeyFrame::SetPose(const cv::Mat &Tcw_) {unique_lock<mutex> lock(mMutexPose);Tcw_.copyTo(Tcw);cv::Mat Rcw = Tcw.rowRange(0,3).colRange(0,3);cv::Mat tcw = Tcw.rowRange(0,3).col(3);cv::Mat Rwc = Rcw.t();Ow = -Rwc*tcw;Twc = cv::Mat::eye(4,4,Tcw.type());Rwc.copyTo(Twc.rowRange(0,3).colRange(0,3));Ow.copyTo(Twc.rowRange(0,3).col(3));cv::Mat center = (cv::Mat_<float>(4,1) << mHalfBaseline, 0 , 0, 1);Cw = Twc*center; }