【控制理论】#3 一阶系统与二阶系统的时域响应分析
系统的时域响应分析研究一个系统在受到一个输入信号后,其输出信号随时间变化的规律和特性。
一阶系统的时域响应分析
一个典型的一阶系统微分方程为
dx(t)dt+ax(t)=bu(t) \frac{\mathrm dx(t)}{\mathrm dt}+ax(t)=bu(t) dtdx(t)+ax(t)=bu(t)
在零初始条件下对其进行拉普拉斯变换可得
sX(s)+aX(s)=bU(s) sX(s)+aX(s)=bU(s) sX(s)+aX(s)=bU(s)
则该系统的传递函数为
G(s)=X(s)U(s)=bs+a G(s)=\frac{X(s)}{U(s)}=\frac b{s+a} G(s)=U(s)X(s)=s+ab
单位冲激响应
单位冲激响应能够最直观地揭示系统固有的动态特性,是分析系统稳定性和响应速度的重要依据。在第一篇中我们介绍过单位冲激函数的定义如下
{δ(t)=0,t≠0∫−∞∞δ(t)dt=1 \left\{\begin{matrix}\delta(t)=0,t\neq0\\\displaystyle\int^\infty_{-\infty}\delta(t)\mathrm dt=1\end{matrix}\right. ⎩⎨⎧δ(t)=0,t=0∫−∞∞δ(t)dt=1
其拉普拉斯变换为
L[δ(t)]=∫0∞δ(t)e−stdt=e−s0=1 \mathcal L[\delta(t)]=\int^\infty_0\delta(t)e^{-st}\mathrm dt=e^{-s0}=1 L[δ(t)]=∫0∞δ(t)e−stdt=e−s0=1
当系统的输入为单位冲激函数时,u(t)=δ(t),U(s)=1u(t)=\delta(t),U(s)=1u(t)=δ(t),U(s)=1,则输出的拉普拉斯变换为
X(s)=U(s)G(s)=bs+a X(s)=U(s)G(s)=\frac b{s+a} X(s)=U(s)G(s)=s+ab
应用拉普拉斯逆变换得
x(t)=L−1[X(s)]=L−1[bs+a]=be−at x(t)=\mathcal L^{-1}[X(s)]=\mathcal L^{-1}\left[\frac b{s+a}\right]=be^{-at} x(t)=L−1[X(s)]=L−1[s+ab]=be−at
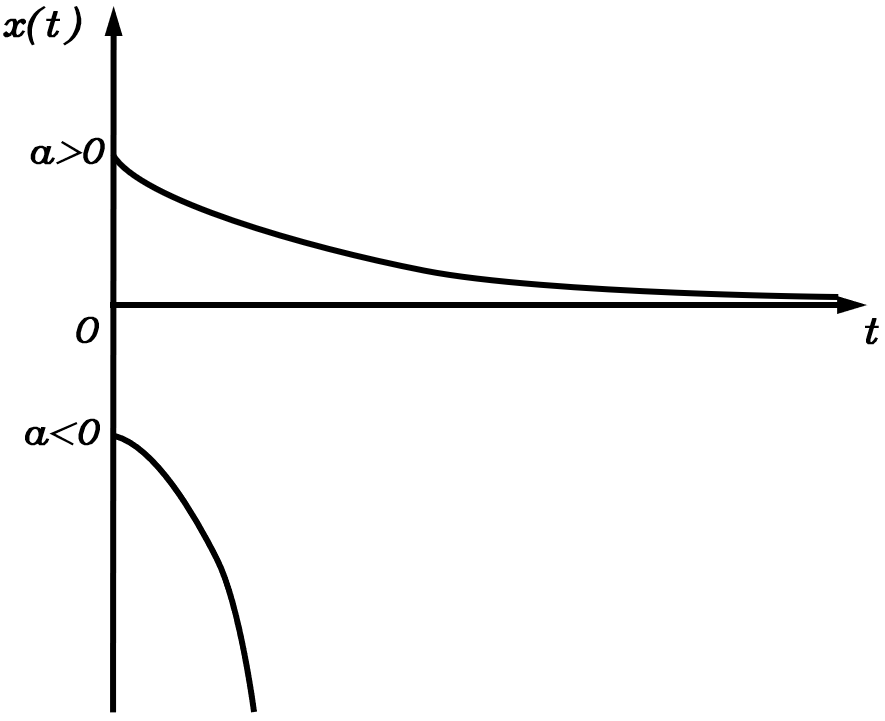
于是我们可画出一阶系统的单位冲激响应图像
对于非零初始条件的零输入响应,即u(0)=0,x(0)=x0≠0u(0)=0,x(0)=x_0\neq0u(0)=0,x(0)=x0=0,则系统微分方程及其拉普拉斯变换变为
dx(t)dt+ax(t)=0sX(s)−x0+aX(s)=0 \begin{matrix}\displaystyle\frac{\mathrm dx(t)}{\mathrm dt}+ax(t)=0\\sX(s)-x_0+aX(s)=0 \end{matrix} dtdx(t)+ax(t)=0sX(s)−x0+aX(s)=0
系统输出的拉普拉斯变换及逆变换结果为
X(s)=x0s+ax(t)=L−1[X(s)]=x0e−at \begin{matrix}\displaystyle X(s)=\frac{x_0}{s+a}\\x(t)=\mathcal L^{-1}[X(s)]=x_0e^{-at} \end{matrix} X(s)=s+ax0x(t)=L−1[X(s)]=x0e−at
则一阶系统的初始条件响应曲线为
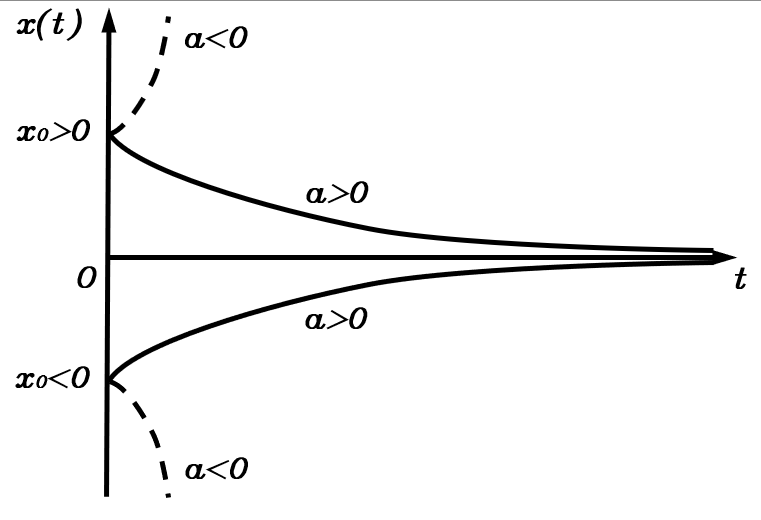
由此可见,一阶系统对初始条件的响应即系统的冲激响应,冲激强度决定系统的初始输出,而输出的收敛或发散取决于aaa的符号。
单位阶跃响应
单位阶跃函数的数学表达式为
u(t)={1,t⩾00,t<0 u(t)=\left\{\begin{matrix}1,t\geqslant0\\0,t<0\end{matrix}\right. u(t)={1,t⩾00,t<0
单位阶跃响应能够非常全面地展示系统的各项性能指标。当系统的输入为单位阶跃函数时,U(s)=1s\displaystyle U(s)=\frac1sU(s)=s1,则系统输出的拉普拉斯变换及其逆变换结果为
X(s)=U(s)G(s)=bs(s+a)x(t)=L−1[X(s)]=L−1[ba(1s−1s+a)]=ba(1−e−at) \begin{matrix}\displaystyle X(s)=U(s)G(s)=\frac b{s(s+a)}\\\displaystyle x(t)=\mathcal L^{-1}[X(s)]=\mathcal{L}^{-1}\left[\frac ba\left(\frac1s-\frac1{s+a}\right)\right]=\frac ba(1-e^{-at}) \end{matrix} X(s)=U(s)G(s)=s(s+a)bx(t)=L−1[X(s)]=L−1[ab(s1−s+a1)]=ab(1−e−at)
当a<0a<0a<0时,x(t)x(t)x(t)将趋于负无穷。当a>0a>0a>0时,一阶系统的单位阶跃响应曲线为
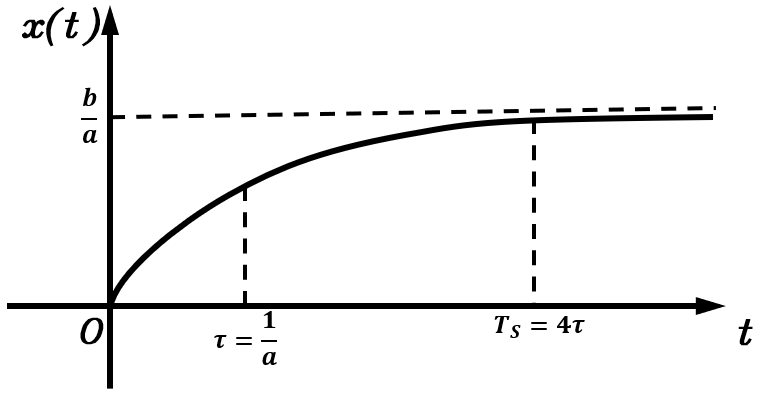
x(t)x(t)x(t)从000开始随着时间的增加而不断地增加,直到达到稳定值ba\displaystyle\frac baab。在这个过程中有两个一阶系统的重要性能指标
- 时间常数:τ=1a\tau=\displaystyle\frac1aτ=a1,此时x(τ)≈0.63ba\displaystyle x(\tau)\approx0.63\frac bax(τ)≈0.63ab。这个参数反映了系统的响应速度,aaa越大,τ\tauτ越小,系统的响应速度越快。
- 稳定时间:TS=4τ=4aT_S=4\tau=\displaystyle\frac4aTS=4τ=a4,此时x(TS)≈0.98bax(T_S)\approx0.98\displaystyle\frac bax(TS)≈0.98ab。它表示了系统输出与终值之间的差距达到2%2\%2%以内所需要的事件,在工程中可以理解为对系统施加一个阶跃输入后,系统需要TST_STS的时间达到稳定状态。
在具体工程案例中,如果确定了一阶系统的终值,可以通过实验的方法测量上述指标来确定一阶系统的参数。
二阶系统的时域响应分析
以下面这个弹簧质量阻尼系统为例(k,b,m>0k,b,m>0k,b,m>0)
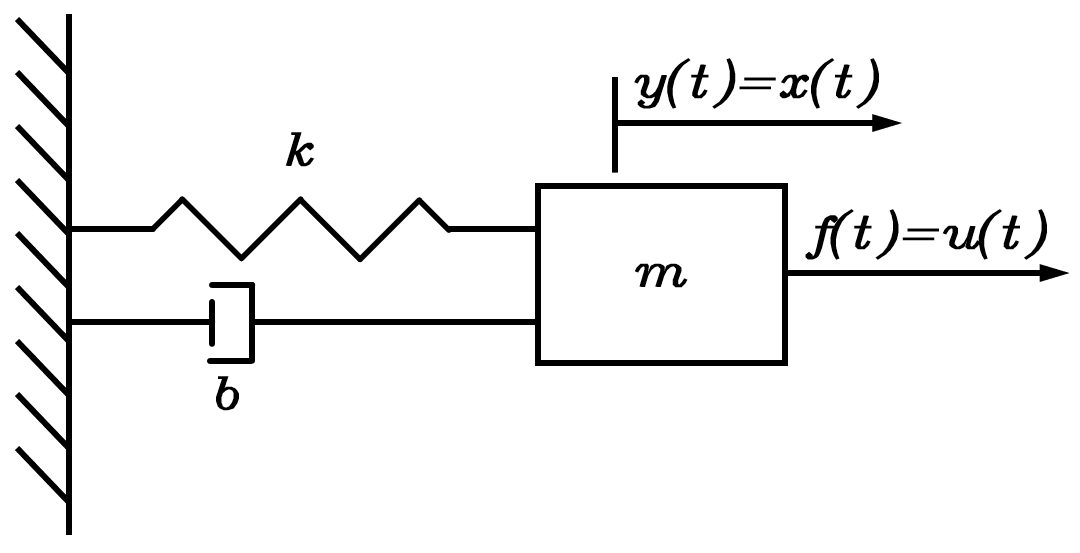
其对应的微分方程为
md2x(t)dt2+bdx(t)dt+kx(t)=f(t) m\frac{\mathrm d^2x(t)}{\mathrm dt^2}+b\frac{\mathrm dx(t)}{\mathrm dt}+kx(t)=f(t) mdt2d2x(t)+bdtdx(t)+kx(t)=f(t)
调整可得
d2x(t)dt2+bmdx(t)dt+kmx(t)=1mf(t) \frac{\mathrm d^2x(t)}{\mathrm dt^2}+\frac bm\frac{\mathrm dx(t)}{\mathrm dt}+\frac kmx(t)=\frac 1mf(t) dt2d2x(t)+mbdtdx(t)+mkx(t)=m1f(t)
定义
- 固有频率:ωn=km\omega_n=\displaystyle\sqrt{\frac km}ωn=mk
- 阻尼比:ζ=b2km\zeta=\displaystyle\frac b{2\sqrt{km}}ζ=2kmb
代入得
d2x(t)dt2+2ζωndx(t)dt+ωn2x(t)=1mf(t) \frac{\mathrm d^2x(t)}{\mathrm dt^2}+2\zeta\omega_n\frac{\mathrm dx(t)}{\mathrm dt}+\omega_n^2x(t)=\frac 1mf(t) dt2d2x(t)+2ζωndtdx(t)+ωn2x(t)=m1f(t)
为了简化计算,定义系统的输入u(t)=f(t)mωn2u(t)=\displaystyle\frac{f(t)}{m\omega_n^2}u(t)=mωn2f(t),代入上式得
d2x(t)dt2+2ζωndx(t)dt+ωn2x(t)=ωn2u(t) \frac{\mathrm d^2x(t)}{\mathrm dt^2}+2\zeta\omega_n\frac{\mathrm dx(t)}{\mathrm dt}+\omega_n^2x(t)=\omega_n^2u(t) dt2d2x(t)+2ζωndtdx(t)+ωn2x(t)=ωn2u(t)
考虑零初始状态,对上式两边进行拉普拉斯变换并整理可得其传递函数为
G(s)=X(s)U(s)=ωn2s2+2ζωns+ωn2 G(s)=\frac{X(s)}{U(s)}=\frac{\omega_n^2}{s^2+2\zeta\omega_ns+\omega_n^2} G(s)=U(s)X(s)=s2+2ζωns+ωn2ωn2
如果使用状态空间方程的表达形式,则设系统的状态变量为z(t)=[z1(t),z2(t)]⊤=[x(t,dx(t)dt)]⊤\boldsymbol z(t)=[z_1(t),z_2(t)]^\top=\left[x(t,\displaystyle\frac{\mathrm dx(t)}{\mathrm dt})\right]^\topz(t)=[z1(t),z2(t)]⊤=[x(t,dtdx(t))]⊤,得到
dz1(t)dt=z2(t)dz2(t)dt=d2z1(t)dt2=−2ζωnz2(t)−ωn2z1(t)+ωn2u(t) \begin{split} \displaystyle\frac{\mathrm dz_1(t)}{\mathrm dt}=&z_2(t)\\ \displaystyle\frac{\mathrm dz_2(t)}{\mathrm dt}=&\displaystyle\frac{\mathrm d^2z_1(t)}{\mathrm dt^2}=-2\zeta\omega_nz_2(t)-\omega_n^2z_1(t)+\omega_n^2u(t) \end{split} dtdz1(t)=dtdz2(t)=z2(t)dt2d2z1(t)=−2ζωnz2(t)−ωn2z1(t)+ωn2u(t)
将其写成紧凑的矩阵形式得到
dz(t)dt=Az(t)+Bu(t) \frac{\mathrm d\boldsymbol z(t)}{\mathrm dt}=\boldsymbol{Az}(t)+\boldsymbol Bu(t) dtdz(t)=Az(t)+Bu(t)
其中
A=[01−ωn2−2ζωn],B=[0ωn2] \boldsymbol A=\begin{bmatrix}0&1\\-\omega_n^2&-2\zeta\omega_n\end{bmatrix},\boldsymbol B=\begin{bmatrix}0\\\omega_n^2\end{bmatrix} A=[0−ωn21−2ζωn],B=[0ωn2]
初始状态响应
本节采用状态空间方程的相轨迹法定性分析系统对初始条件的响应,即系统在无输入情况下,t=0t=0t=0时刻质量块的位置x(0)≠0x(0)\neq0x(0)=0或速度dx(t)dt∣t=0≠0\displaystyle\left.\frac{\mathrm dx(t)}{\mathrm dt}\right|_{t=0}\neq0dtdx(t)t=0=0的响应。
当系统的输入u(t)=0u(t)=0u(t)=0时,系统的状态空间方程可写成
dz(t)dt=Az(t),A=[01−ωn2−2ζωn] \frac{\mathrm d\boldsymbol z(t)}{\mathrm dt}=\boldsymbol{Az}(t),\boldsymbol A=\begin{bmatrix}0&1\\-\omega_n^2&-2\zeta\omega_n\end{bmatrix} dtdz(t)=Az(t),A=[0−ωn21−2ζωn]
求该系统的平衡点,令dz(t)dt=0\displaystyle\frac{\mathrm d\boldsymbol z(t)}{\mathrm dt}=0dtdz(t)=0可得z1f=z2f=0z_{1f}=z_{2f}=0z1f=z2f=0。
分析平衡点的性质需得到状态矩阵A\boldsymbol AA的特征值,令∣A−λI∣=0|\boldsymbol A-\lambda\boldsymbol I|=0∣A−λI∣=0得
∣−λ1−ωn2−2ζωn−λ∣=λ2+2ζωnλ+ωn2=0 \begin{vmatrix}-\lambda&1\\-\omega_n^2&-2\zeta\omega_n-\lambda\end{vmatrix}=\lambda^2+2\zeta\omega_n\lambda+\omega_n^2=0 −λ−ωn21−2ζωn−λ=λ2+2ζωnλ+ωn2=0
{λ1=−ζωn+ωnζ2−1λ2=−ζωn−ωnζ2−1 \left\{\begin{matrix}\lambda_1=-\zeta\omega_n+\omega_n\sqrt{\zeta^2-1}\\\lambda_2=-\zeta\omega_n-\omega_n\sqrt{\zeta^2-1}\end{matrix}\right. {λ1=−ζωn+ωnζ2−1λ2=−ζωn−ωnζ2−1
情况一:ζ⩾1\zeta\geqslant1ζ⩾1
此时λ1,λ2\lambda_1,\lambda_2λ1,λ2均为实数且都小于零,根据上一篇可知平衡点zf=[0,0]⊤\boldsymbol z_f=[0,0]^\topzf=[0,0]⊤是一个稳定节点,相轨迹如下图所示
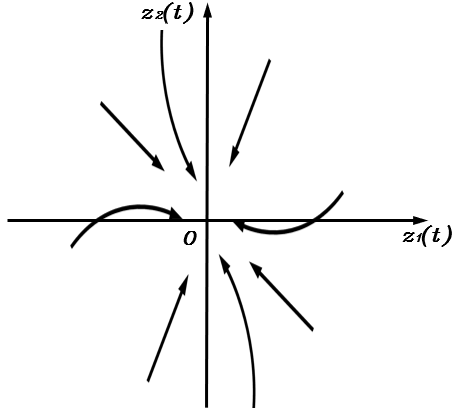
不管初始位置从何处开始,系统能量都会随着时间的增加而趋于零。其中,当ζ>1\zeta>1ζ>1时的系统称为过阻尼系统,当ζ=1\zeta=1ζ=1时的系统称为临界阻尼系统,二者的区别在于临界阻尼系统收敛更快。
情况二:0<ζ<10<\zeta<10<ζ<1
此时ζ2−1=1−ζ2j\sqrt{\zeta^2-1}=\sqrt{1-\zeta^2}\mathrm jζ2−1=1−ζ2j,则有
{λ1=−ζωn+ωn1−ζ2jλ2=−ζωn−ωn1−ζ2j \left\{\begin{matrix}\lambda_1=-\zeta\omega_n+\omega_n\sqrt{1-\zeta^2}\mathrm j\\\lambda_2=-\zeta\omega_n-\omega_n\sqrt{1-\zeta^2}\mathrm j\end{matrix}\right. {λ1=−ζωn+ωn1−ζ2jλ2=−ζωn−ωn1−ζ2j
λ1,λ2\lambda_1,\lambda_2λ1,λ2为一对实部小于零的共轭复数,上一篇未提到这种情况。对于λ1,2=σ±jω\lambda_{1,2}=\sigma\pm\mathrm j\omegaλ1,2=σ±jω,则分析状态方程解耦后新状态变量
dzˉ(t)dt=[σ+jω00σ−jω]zˉ(t) \frac{\mathrm d\bar{\boldsymbol z}(t)}{\mathrm dt}=\begin{bmatrix}\sigma+\mathrm j\omega&0\\0&\sigma-\mathrm j\omega\end{bmatrix}\bar{\boldsymbol z}(t) dtdzˉ(t)=[σ+jω00σ−jω]zˉ(t)
zˉ(t)=[C1e(σ+jω)tC2e(σ−jω)t]=eσt[C1ejωtC2e−jωt] \bar{\boldsymbol z}(t)=\begin{bmatrix}C_1e^{(\sigma+\mathrm j\omega)t}\\C_2e^{(\sigma-\mathrm j\omega)t}\end{bmatrix}=e^{\sigma t}\begin{bmatrix}C_1e^{\mathrm j\omega t}\\C_2e^{-\mathrm j\omega t}\end{bmatrix} zˉ(t)=[C1e(σ+jω)tC2e(σ−jω)t]=eσt[C1ejωtC2e−jωt]
该相轨迹在实部平面上的投影为螺旋线,σ\sigmaσ的正负决定了系数eσte^{\sigma t}eσt随时间增加而增大还是趋于零。当σ>0\sigma>0σ>0时,zˉ(t)\bar{\boldsymbol z}(t)zˉ(t)的相轨迹为从平衡点向外发散的螺旋线,平衡点称为不稳定焦点;当σ<0\sigma<0σ<0时,zˉ(t)\bar{\boldsymbol z}(t)zˉ(t)的相轨迹为向内收敛到平衡点的螺旋线,平衡点称为稳定焦点。
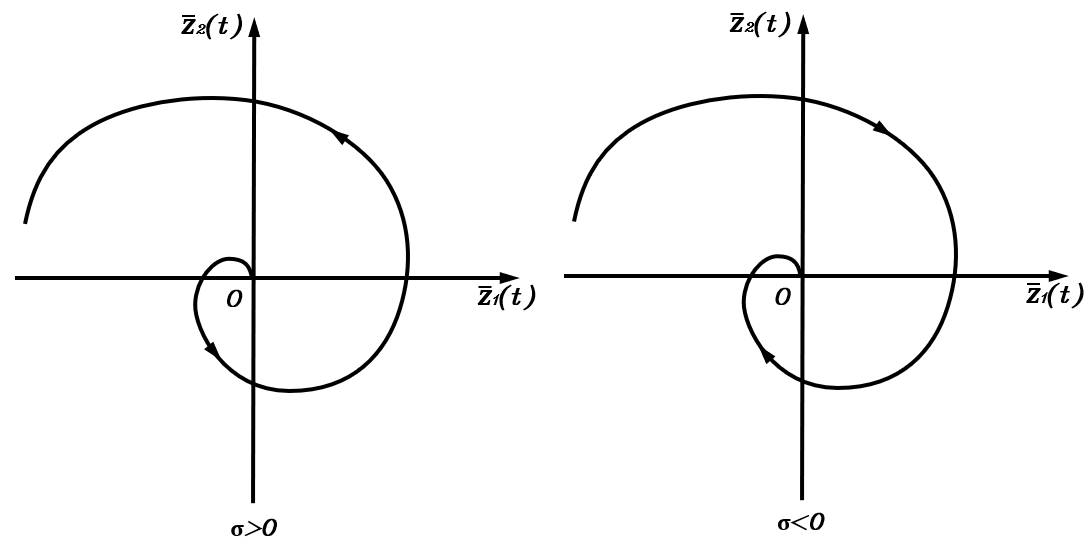
原状态变量z(t)\boldsymbol z(t)z(t)的相轨迹只是在此基础上经过了线性变换,变化趋势相同。对于弹簧阻尼系统而言,其相轨迹是类似右图的螺旋线,即边振荡边衰减,这种系统称为欠阻尼系统。
情况三:ζ=0\zeta=0ζ=0
此时λ1,2=±ωnj\lambda_{1,2}=\pm\omega_n\mathrm jλ1,2=±ωnj,根据上一篇可知平衡点zf=[0,0]⊤\boldsymbol z_f=[0,0]^\topzf=[0,0]⊤是一个中心点,相轨迹如下图所示
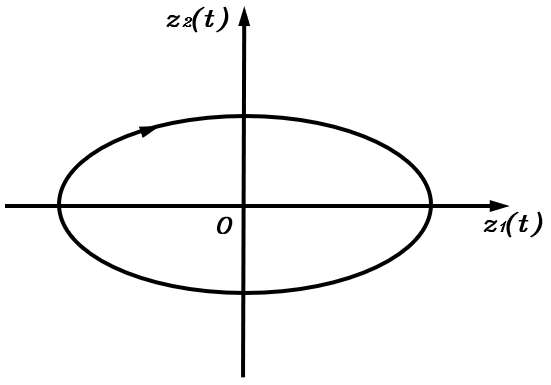
质量块将会不断地振动,循环往复,总能量不会被消耗,这种系统称为无阻尼系统。
单位阶跃响应
本节采用传递函数的方法定量分析二阶系统的单位阶跃响应。当系统的输入为单位阶跃函数时,输入的拉普拉斯变换为U(s)=1sU(s)=\displaystyle\frac1sU(s)=s1,可求出系统输出的拉普拉斯变换为
X(s)=G(s)U(s)=ωn2s2+2ζωns+ωn2×1s X(s)=G(s)U(s)=\frac{\omega_n^2}{s^2+2\zeta\omega_ns+\omega_n^2}\times\frac1s X(s)=G(s)U(s)=s2+2ζωns+ωn2ωn2×s1
令分母为零可求出系统的三个极点分别为
{sp1=0sp2=−ζωn+ωnζ2−1sp3=−ζωn−ωnζ2−1 \left\{\begin{split}s_{p1}&=0\\s_{p2}&=-\zeta\omega_n+\omega_n\sqrt{\zeta^2-1}\\s_{p3}&=-\zeta\omega_n-\omega_n\sqrt{\zeta^2-1}\end{split}\right. ⎩⎨⎧sp1sp2sp3=0=−ζωn+ωnζ2−1=−ζωn−ωnζ2−1
不同的ζ\zetaζ值将对应不同的系统表现,本节以欠阻尼系统0<ζ<10<\zeta<10<ζ<1这个最复杂的情况为例,此时系统的极点变为
{sp1=0sp2=−ζωn+ωn1−ζ2jsp3=−ζωn−ωn1−ζ2j \left\{\begin{split}s_{p1}&=0\\s_{p2}&=-\zeta\omega_n+\omega_n\sqrt{1-\zeta^2}\mathrm j\\s_{p3}&=-\zeta\omega_n-\omega_n\sqrt{1-\zeta^2}\mathrm j\end{split}\right. ⎩⎨⎧sp1sp2sp3=0=−ζωn+ωn1−ζ2j=−ζωn−ωn1−ζ2j
接下来采用分式分解法求X(s)X(s)X(s)的拉普拉斯逆变换,设三个待定的分子系数分别为A,B,CA,B,CA,B,C,可得
X(s)=ωn2s(s2+2ζωns+ωn2)=As−sp1+Bs−sp2+Cs−sp3=A(s−sp2)(s−sp3)+B(s−sp1)(s−sp3)+C(s−sp1)(s−sp2)(s−sp1)(s−sp2)(s−sp3) \begin{split} X(s)&=\frac{\omega_n^2}{s(s^2+2\zeta\omega_ns+\omega_n^2)}=\frac A{s-s_{p1}}+\frac B{s-s_{p2}}+\frac C{s-s_{p3}}\\ &=\frac{A(s-s_{p2})(s-s_{p3})+B(s-s_{p1})(s-s_{p3})+C(s-s_{p1})(s-s_{p2})}{(s-s_{p1})(s-s_{p2})(s-s_{p3})} \end{split} X(s)=s(s2+2ζωns+ωn2)ωn2=s−sp1A+s−sp2B+s−sp3C=(s−sp1)(s−sp2)(s−sp3)A(s−sp2)(s−sp3)+B(s−sp1)(s−sp3)+C(s−sp1)(s−sp2)
取等式两侧分子
ωn2=A(s−sp2)(s−sp3)+B(s−sp1)(s−sp3)+C(s−sp1)(s−sp2) \omega_n^2=A(s-s_{p2})(s-s_{p3})+B(s-s_{p1})(s-s_{p3})+C(s-s_{p1})(s-s_{p2}) ωn2=A(s−sp2)(s−sp3)+B(s−sp1)(s−sp3)+C(s−sp1)(s−sp2)
分别令s=sp1,sp2,sp3s=s_{p1},s_{p2},s_{p3}s=sp1,sp2,sp3可利用上式求出三个系数如下
{A=1B=−12(1−ζ1−ζ2j)C=−12(1−ζ1+ζ2j) \left\{\begin{split} A&=1\\ B&=-\frac12(1-\frac\zeta{\sqrt{1-\zeta^2}}\mathrm j)\\ C&=-\frac12(1-\frac\zeta{\sqrt{1+\zeta^2}}\mathrm j) \end{split}\right. ⎩⎨⎧ABC=1=−21(1−1−ζ2ζj)=−21(1−1+ζ2ζj)
于是X(s)X(s)X(s)的分式分解结果为
X(s)=1s−sp1−12(1−ζ1−ζ2j)1s−sp2−12(1+ζ1−ζ2j)1s−sp3 X(s)=\frac1{s-s_{p1}}-\frac12(1-\frac\zeta{\sqrt{1-\zeta^2}}\mathrm j)\frac1{s-s_{p2}}-\frac12(1+\frac\zeta{\sqrt{1-\zeta^2}}\mathrm j)\frac1{s-s_{p3}} X(s)=s−sp11−21(1−1−ζ2ζj)s−sp21−21(1+1−ζ2ζj)s−sp31
其拉普拉斯逆变换为
x(t)=L−1[X(s)]=esp1t−12(1−ζ1−ζ2j)esp2t−12(1+ζ1−ζ2j)esp3t x(t)=\mathcal L^{-1}[X(s)]=e^{s_{p1}t}-\frac12(1-\frac\zeta{\sqrt{1-\zeta^2}}\mathrm j)e^{s_{p2}t}-\frac12(1+\frac\zeta{\sqrt{1-\zeta^2}}\mathrm j)e^{s_{p3}t} x(t)=L−1[X(s)]=esp1t−21(1−1−ζ2ζj)esp2t−21(1+1−ζ2ζj)esp3t
将极点的值代入得
x(t)=1−e−ζωnt[12(1−ζ1−ζ2j)eωn1−ζ2jt−12(1+ζ1−ζ2j)e−ωn1−ζ2jt] x(t)=1-e^{-\zeta\omega_nt}\left[\frac12(1-\frac\zeta{\sqrt{1-\zeta^2}}\mathrm j)e^{\omega_n\sqrt{1-\zeta^2}\mathrm jt}-\frac12(1+\frac\zeta{\sqrt{1-\zeta^2}}\mathrm j)e^{-\omega_n\sqrt{1-\zeta^2}\mathrm jt}\right] x(t)=1−e−ζωnt[21(1−1−ζ2ζj)eωn1−ζ2jt−21(1+1−ζ2ζj)e−ωn1−ζ2jt]
定义系统的阻尼固有频率为ωd=ωn1−ζ2\omega_d=\omega_n\sqrt{1-\zeta^2}ωd=ωn1−ζ2,即极点sp2,p3s_{p2,p3}sp2,p3的虚部。此时上式可化简为
x(t)=1−e−ζωnt[12(1−ζ1−ζ2j)eωdjt−12(1+ζ1−ζ2j)e−ωdjt]=1−e−ζωnt[12(eωdjt+e−ωdjt)+12ζ1−ζ2j(−eωdjt+e−ωdjt)] \begin{split} x(t)&=1-e^{-\zeta\omega_nt}\left[\frac12(1-\frac\zeta{\sqrt{1-\zeta^2}}\mathrm j)e^{\omega_d\mathrm jt}-\frac12(1+\frac\zeta{\sqrt{1-\zeta^2}}\mathrm j)e^{-\omega_d\mathrm jt}\right]\\ &=1-e^{-\zeta\omega_nt}\left[\frac12(e^{\omega_d\mathrm jt}+e^{-\omega_d\mathrm jt})+\frac12\frac\zeta{\sqrt{1-\zeta^2}}\mathrm j(-e^{\omega_d\mathrm jt}+e^{-\omega_d\mathrm jt})\right] \end{split} x(t)=1−e−ζωnt[21(1−1−ζ2ζj)eωdjt−21(1+1−ζ2ζj)e−ωdjt]=1−e−ζωnt[21(eωdjt+e−ωdjt)+211−ζ2ζj(−eωdjt+e−ωdjt)]
根据欧拉公式,eωdjt=cosωdt+jsinωdte^{\omega_d\mathrm jt}=\cos\omega_dt+\mathrm j\sin\omega_dteωdjt=cosωdt+jsinωdt,e−ωdjt=cosωdt−jsinωdte^{-\omega_d\mathrm jt}=\cos\omega_dt-\mathrm j\sin\omega_dte−ωdjt=cosωdt−jsinωdt,可得
12(eωdjt+e−ωdjt)=cosωdt12j(−eωdjt+e−ωdjt)=sinωdt \begin{split} \frac12(e^{\omega_d\mathrm jt}+e^{-\omega_d\mathrm jt})=\cos\omega_dt\\ \frac12\mathrm j(-e^{\omega_d\mathrm jt}+e^{-\omega_d\mathrm jt})=\sin\omega_dt \end{split} 21(eωdjt+e−ωdjt)=cosωdt21j(−eωdjt+e−ωdjt)=sinωdt
代回原式化简得到
x(t)=1−e−ζωnt[cosωdt+ζ1−ζ2sinωdt] x(t)=1-e^{-\zeta\omega_nt}\left[\cos\omega_dt+\frac\zeta{\sqrt{1-\zeta^2}}\sin\omega_dt\right] x(t)=1−e−ζωnt[cosωdt+1−ζ2ζsinωdt]
令φ=arctan1−ζ2ζ\varphi=\arctan\displaystyle\frac{\sqrt{1-\zeta^2}}\zetaφ=arctanζ1−ζ2,可得
cosωdt+ζ1−ζ2sinωdt=12+(ζ1−ζ2)2sin(ωdt+φ)=11−ζ2sin(ωdt+φ) \begin{split} \cos\omega_dt+\frac\zeta{\sqrt{1-\zeta^2}}\sin\omega_dt&=\sqrt{1^2+\left(\frac\zeta{\sqrt{1-\zeta^2}}\right)^2}\sin(\omega_dt+\varphi)\\ &=\sqrt{\frac1{1-\zeta^2}}\sin(\omega_dt+\varphi) \end{split} cosωdt+1−ζ2ζsinωdt=12+(1−ζ2ζ)2sin(ωdt+φ)=1−ζ21sin(ωdt+φ)
代回原式化简得到
x(t)=1−e−ζωnt11−ζ2sin(ωdt+φ) x(t)=1-e^{-\zeta\omega_nt}\sqrt{\frac1{1-\zeta^2}}\sin(\omega_dt+\varphi) x(t)=1−e−ζωnt1−ζ21sin(ωdt+φ)
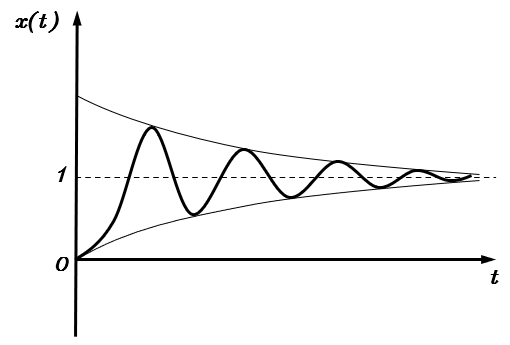
上式即为二阶欠阻尼系统单位阶跃响应的时间函数,其中“1”来自系统输入,后半部分的e−ζωnt11−ζ2sin(ωdt+φ)\displaystyle e^{-\zeta\omega_nt}\sqrt{\frac1{1-\zeta^2}}\sin(\omega_dt+\varphi)e−ζωnt1−ζ21sin(ωdt+φ)是一个指数衰减的三角函数,综合来看x(t)x(t)x(t)的图像如下
同样的方法可以用于推导其他情况,这里直接给出结果
- 无阻尼:x(t)=1−cosωntx(t)=1-\cos\omega_ntx(t)=1−cosωnt
- 临界阻尼:x(t)=1−e−ωnt(1+ωnt)x(t)=1-e^{-\omega_nt}(1+\omega_nt)x(t)=1−e−ωnt(1+ωnt)
- 过阻尼:x(t)=1−12ζ2−1(ζ−ζ2−1)e(−ζ+ζ2−1)ωnt+12ζ2−1(ζ+ζ2−1)e(−ζ−ζ2−1)ωntx(t)=1-\displaystyle\frac1{2\sqrt{\zeta^2-1}(\zeta-\sqrt{\zeta^2-1})}e^{(-\zeta+\sqrt{\zeta^2-1})\omega_nt}+\frac1{2\sqrt{\zeta^2-1}(\zeta+\sqrt{\zeta^2-1})}e^{(-\zeta-\sqrt{\zeta^2-1})\omega_nt}x(t)=1−2ζ2−1(ζ−ζ2−1)1e(−ζ+ζ2−1)ωnt+2ζ2−1(ζ+ζ2−1)1e(−ζ−ζ2−1)ωnt
二阶系统的性能指标分析
弹簧阻尼系统是控制领域最基础的物理模型之一,其描述了一个系统的两种基本动态特性
- 惯性/弹性(弹簧系数kkk):代表系统存储和释放能量的能力,倾向于使系统振荡。
- 耗散/阻力(阻尼系数bbb):代表系统消耗能量的能力,倾向于使系统稳定下来,抑制振荡。
下面以上一节求出的欠阻尼单位阶跃响应函数为例,介绍该系统的一些重要的性能指标
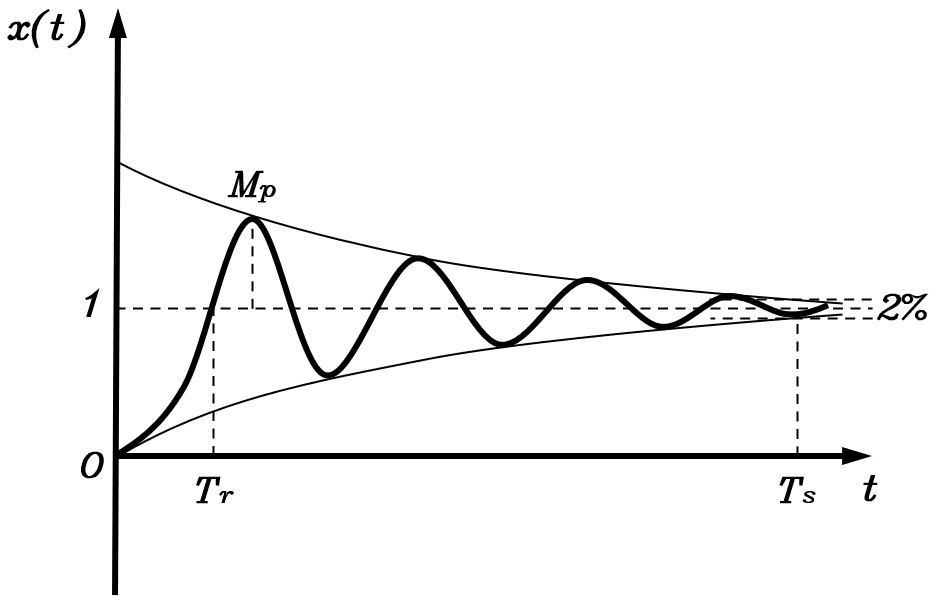
上升时间TrT_rTr:系统第一次到达稳定点的时间,体现了系统的反应速度。对于达不到稳定点的系统取稳定值的90%90\%90%。
根据定义,x(Tr)=1x(T_r)=1x(Tr)=1,代入函数表达式得
1=1−e−ζωnTr11−ζ2sin(ωdTr+φ)0=e−ζωnTr11−ζ2sin(ωdTr+φ) \begin{split} 1&=1-e^{-\zeta\omega_nT_r}\sqrt{\frac1{1-\zeta^2}}\sin(\omega_dT_r+\varphi)\\ 0&=e^{-\zeta\omega_nT_r}\sqrt{\frac1{1-\zeta^2}}\sin(\omega_dT_r+\varphi) \end{split} 10=1−e−ζωnTr1−ζ21sin(ωdTr+φ)=e−ζωnTr1−ζ21sin(ωdTr+φ)
由于e−ζωnTr11−ζ2≠0\displaystyle e^{-\zeta\omega_nT_r}\sqrt{\frac1{1-\zeta^2}}\neq0e−ζωnTr1−ζ21=0,故等式成立时只有sin(ωdTr+φ)=0\sin(\omega_dT_r+\varphi)=0sin(ωdTr+φ)=0,得到
ωdTr+φ=kπ,k=1,2,3,⋯Tr=kπ−φωd,k=1,2,3,⋯ \begin{split} \omega_dT_r+\varphi=k\pi,k=1,2,3,\cdots\\ T_r=\frac{k\pi-\varphi}{\omega_d},k=1,2,3,\cdots \end{split} ωdTr+φ=kπ,k=1,2,3,⋯Tr=ωdkπ−φ,k=1,2,3,⋯
第一次达到稳定点的时间取k=1k=1k=1得
Tr=π−φωd=π−φωn1−ζ2 T_r=\frac{\pi-\varphi}{\omega_d}=\frac{\pi-\varphi}{\omega_n\sqrt{1-\zeta^2}} Tr=ωdπ−φ=ωn1−ζ2π−φ
上式说明,固有频率ωn\omega_nωn越大或阻尼比ζ\zetaζ越小,上升时间TrT_rTr越小,系统的响应就越快。
最大超调量MpM_pMp:系统输出的最大值与稳态值的相对误差,即Mp=xmax−x(∞)x(∞)×100%M_p=\displaystyle\frac{x_{\max}-x(\infty)}{x(\infty)}\times100\%Mp=x(∞)xmax−x(∞)×100%,体现了系统的相对稳定性。
求解最大超调量首先要找到系统的峰值时间TpT_pTp,在此时刻有
dx(t)dt∣t=Tp=e−ζωnTp11−ζ2(ζωnsin(ωdTp+φ)−ωdcos(ωdTp+φ))=0 \begin{split} \left.\frac{\mathrm dx(t)}{\mathrm dt}\right|_{t=T_p}&=e^{-\zeta\omega_nT_p}\sqrt{\frac1{1-\zeta^2}}(\zeta\omega_n\sin(\omega_dT_p+\varphi)-\omega_d\cos(\omega_dT_p+\varphi))\\&=0 \end{split} dtdx(t)t=Tp=e−ζωnTp1−ζ21(ζωnsin(ωdTp+φ)−ωdcos(ωdTp+φ))=0
由于e−ζωnTr11−ζ2≠0\displaystyle e^{-\zeta\omega_nT_r}\sqrt{\frac1{1-\zeta^2}}\neq0e−ζωnTr1−ζ21=0,故等式成立时只有ζωnsin(ωdTr+φ)−ωdcos(ωdTp+φ)=0\zeta\omega_n\sin(\omega_dT_r+\varphi)-\omega_d\cos(\omega_dT_p+\varphi)=0ζωnsin(ωdTr+φ)−ωdcos(ωdTp+φ)=0,得到
ζωnsin(ωdTr+φ)=ωdcos(ωdTp+φ)tan(ωdTp+φ)=ωdζωn=1−ζ2ζ \begin{split} \zeta\omega_n\sin(\omega_dT_r+\varphi)=\omega_d\cos(\omega_dT_p+\varphi)\\ \tan(\omega_dT_p+\varphi)=\frac{\omega_d}{\zeta\omega_n}=\frac{\sqrt{1-\zeta^2}}\zeta \end{split} ζωnsin(ωdTr+φ)=ωdcos(ωdTp+φ)tan(ωdTp+φ)=ζωnωd=ζ1−ζ2
根据上一小节定义,1−ζ2ζ=tanφ\displaystyle\frac{\sqrt{1-\zeta^2}}\zeta=\tan\varphiζ1−ζ2=tanφ,所以tan(ωdTp+φ)=tanφ\tan(\omega_dT_p+\varphi)=\tan\varphitan(ωdTp+φ)=tanφ,即
ωdTp=kπ,k=1,2,3,⋯ \omega_dT_p=k\pi,k=1,2,3,\cdots ωdTp=kπ,k=1,2,3,⋯
第一次峰值时间取k=1k=1k=1得
Tp=πωd=πωn1−ζ2 T_p=\frac\pi{\omega_d}=\frac\pi{\omega_n\sqrt{1-\zeta^2}} Tp=ωdπ=ωn1−ζ2π
将TpT_pTp代入系统输出函数得
x(Tp)=1+e−ζπ1−ζ211−ζ2sinφ x(T_p)=1+e^{-\frac{\zeta\pi}{\sqrt{1-\zeta^2}}}\sqrt{\frac1{1-\zeta^2}}\sin\varphi x(Tp)=1+e−1−ζ2ζπ1−ζ21sinφ
因为1−ζ2ζ=tanφ\displaystyle\frac{\sqrt{1-\zeta^2}}\zeta=\tan\varphiζ1−ζ2=tanφ,所以sinφ=1−ζ2\sin\varphi=\sqrt{1-\zeta^2}sinφ=1−ζ2,代入上式得
x(Tp)=1+e−ζπ1−ζ2 x(T_p)=1+e^{-\frac{\zeta\pi}{\sqrt{1-\zeta^2}}} x(Tp)=1+e−1−ζ2ζπ
则该系统的最大超调量为
Mp=1+e−ζπ1−ζ2−11×100%=e−ζπ1−ζ2 M_p=\frac{1+e^{-\frac{\zeta\pi}{\sqrt{1-\zeta^2}}}-1}{1}\times100\%=e^{-\frac{\zeta\pi}{\sqrt{1-\zeta^2}}} Mp=11+e−1−ζ2ζπ−1×100%=e−1−ζ2ζπ
上式说明,最大超调量只与阻尼比ζ\zetaζ相关。ζ\zetaζ越大,MpM_pMp就越小。
稳定时间TsT_sTs:系统进入稳态的误差范围内的时间,一般为最终状态的2%2\%2%以内,体现了系统的收敛速度。根据其定义可得
x(Ts)=1−e−ζωnTs11−ζ2sin(ωdTs+φ)=0.98 x(T_s)=1-e^{-\zeta\omega_nT_s}\sqrt{\frac1{1-\zeta^2}}\sin(\omega_dT_s+\varphi)=0.98 x(Ts)=1−e−ζωnTs1−ζ21sin(ωdTs+φ)=0.98
考虑稳态时振动部分的最大值,即sin(ωdTs+φ)=1\sin(\omega_dT_s+\varphi)=1sin(ωdTs+φ)=1,则上式变为
e−ζωnTs11−ζ2=0.02 e^{-\zeta\omega_nT_s}\sqrt{\frac1{1-\zeta^2}}=0.02 e−ζωnTs1−ζ21=0.02
对于较小的ζ\zetaζ,11−ζ2≈1\sqrt{\displaystyle\frac1{1-\zeta^2}}\approx11−ζ21≈1,TsT_sTs可用如下近似公式计算
Ts≈4ζωn T_s\approx\frac4{\zeta\omega_n} Ts≈ζωn4
上式说明稳定时间与ζωn\zeta\omega_nζωn(即系统极点sp2,p3s_{p2,p3}sp2,p3的实部)成反比。
与一阶系统中相同,上述指标也可以通过实验测得,进而用于系统的相关参数。
在设计系统时,通常情况下,我们无法要求系统的各项指标都达到优秀,尤其是在引入更多指标之后,需要结合应用场景优先考虑某些指标。对于追求精度与稳定的系统,应当注重最大超调量;而对于需要应对突发情况的场景,则上升时间会成为首选要素。