磁共振成像原理(理论)15:空间信息编码 (Spatial Information Encoding) -频率编码相位编码
在信号被选择性或非选择性射频脉冲激发后,空间信息可以在自由进动期间编码到信号中。由于激发的磁共振信号呈复指数形式,我们本质上可以通过两种方式编码空间信息:频率编码和相位编码。
频率编码
频率编码使激发的磁共振信号的振荡频率线性依赖于其空间位置。
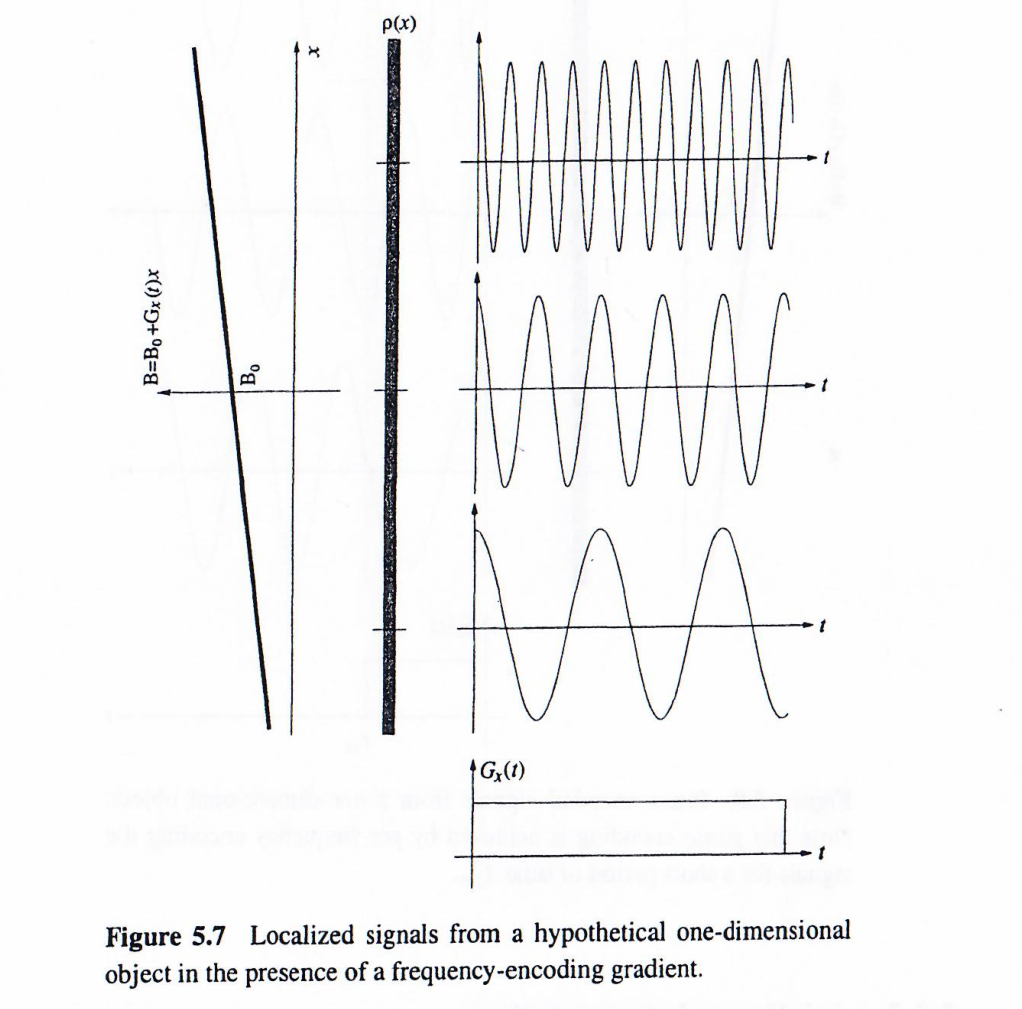
考虑一个理想化的一维物体,其自旋分布为 ρ(x)\rho(x)ρ(x)。如果在激发后物体经历均匀主磁场 B0B_0B0 叠加线性梯度场 GxxG_x xGxx,则位置 xxx 处的拉莫尔频率为:
ω(x)=ω0+γGxx(5.48)
\omega(x) = \omega_0 + \gamma G_x x \tag{5.48}
ω(x)=ω0+γGxx(5.48)
相应地,在点 xxx 处无限小间隔 dxdxdx 内的自旋产生的自由感应衰减信号(忽略横向弛豫效应)为:
dS(x,t)∝ρ(x)dxe−iγ(B0+Gxx)t(5.49)
dS(x,t) \propto \rho(x)dx e^{-i\gamma(B_0 + G_x x)t} \tag{5.49}
dS(x,t)∝ρ(x)dxe−iγ(B0+Gxx)t(5.49)
其中比例常数取决于翻转角、主磁场强度等因素。为简化符号,我们忽略这个缩放常数,将公式(5.49)重写为:
dS(x,t)=ρ(x)dxe−iγ(B0+Gxx)t(5.50)
dS(x,t) = \rho(x)dx e^{-i\gamma(B_0 + G_x x)t} \tag{5.50}
dS(x,t)=ρ(x)dxe−iγ(B0+Gxx)t(5.50)
公式(5.50)中的信号被称为频率编码信号,因为其振荡频率 ω(x)=γ(B0+Gxx)\omega(x) = \gamma(B_0 + G_x x)ω(x)=γ(B0+Gxx) 与空间位置线性相关。因此,在这个例子中,GxG_xGx 被称为频率编码梯度。
GxG_xGx梯度场对磁共振信号频率的影响如下图所示:频率编码梯度场使得不同空间位置(xxx方向)的原子团具备不同的拉莫尔频率,随着时间的推进,这些信号逐渐失去相位一致性。因此,经过频率编码的接收信号预期将以比未编码信号更快的速率衰减。
当存在此频率编码梯度时,从整个物体接收到的信号为:
S(t)=∫objectdS(x,t)=∫−∞∞ρ(x)e−iγ(B0+Gxx)tdx=[∫−∞∞ρ(x)e−iγGxxtdx]e−iω0t(5.51)
\begin{aligned}
S(t) = \int_{\text{object}} dS(x,t) &= \int_{-\infty}^{\infty} \rho(x) e^{-i\gamma(B_0 + G_x x)t} dx \\
&= [ \int_{-\infty}^{\infty} \rho(x) e^{-i\gamma G_x x t} dx ] e^{-i\omega_0 t}
\end{aligned} \tag{5.51}
S(t)=∫objectdS(x,t)=∫−∞∞ρ(x)e−iγ(B0+Gxx)tdx=[∫−∞∞ρ(x)e−iγGxxtdx]e−iω0t(5.51)
解调(即去除载波信号 e−iω0te^{-i\omega_0 t}e−iω0t)后,得到:
S(t)=∫−∞∞ρ(x)e−iγGxxtdx(5.52)
S(t) = \int_{-\infty}^{\infty} \rho(x) e^{-i\gamma G_x x t} dx \tag{5.52}
S(t)=∫−∞∞ρ(x)e−iγGxxtdx(5.52)
将分析推广到一般情况,解调后的频率编码自由感应衰减信号的一般表达式可表示为:
S(t)=∫objectρ(r)e−iγGfe⋅r⋅tdr(5.53)
S(t) = \int_{\text{object}} \rho(\mathbf{r}) e^{-i\gamma \mathbf{G}_{\text{fe}} \cdot \mathbf{r} \cdot t} d \mathbf{r} \tag{5.53}
S(t)=∫objectρ(r)e−iγGfe⋅r⋅tdr(5.53)
其中 Gfe\mathbf{G}_{\text{fe}}Gfe 是频率编码梯度(下标fefefe就是Frequency Encoding的缩写)定义为:
Gfe=(Gx,Gy,Gz)(5.54) \mathbf{G}_{\text{fe}} = (G_x, G_y, G_z) \tag{5.54} Gfe=(Gx,Gy,Gz)(5.54)
类似地,解调后的频率编码的回波信号的一般表达式可表示为:
S(t)=∫objectρ(r)e−iγGfe⋅r(t−TE)dr(5.55)
S(t) = \int_{\text{object}} \rho(\mathbf{r}) e^{-i\gamma \mathbf{G}_{\text{fe}} \cdot \mathbf{r} (t - T_E)} d \mathbf{r} \tag{5.55}
S(t)=∫objectρ(r)e−iγGfe⋅r(t−TE)dr(5.55)
其中TET_ETE是回波时间,当t=TEt=T_Et=TE时,回波达到最大值。
一个重要问题是:同时开启 GxG_xGx、GyG_yGy 和 GzG_zGz 是否能为每个空间点分配唯一频率?答案是否定的。设拉莫尔频率为常数:
γGfe⋅r=c(5.56) \gamma \mathbf{G}_{\text{fe}} \cdot \mathbf{r} = c \tag{5.56} γGfe⋅r=c(5.56)
- 在二维情况下,公式(5.56)定义了一族等频率线,所有这些线都垂直于 Gfe\mathbf{G}_{\text{fe}}Gfe。
- 在三维情况下,公式(5.56)定义了一族等频率平面, Gfe\mathbf{G}_{\text{fe}}Gfe正是该平面的法线方向。
因此,对于固定的频率编码梯度矢量 Gfe\mathbf{G}_{\text{fe}}Gfe,空间信息仅沿梯度方向进行频率编码。
相位编码
理解频率编码的原理后,相位编码就很容易理解了。相位编码使激发的磁共振信号的振荡相位线性依赖于其空间位置。
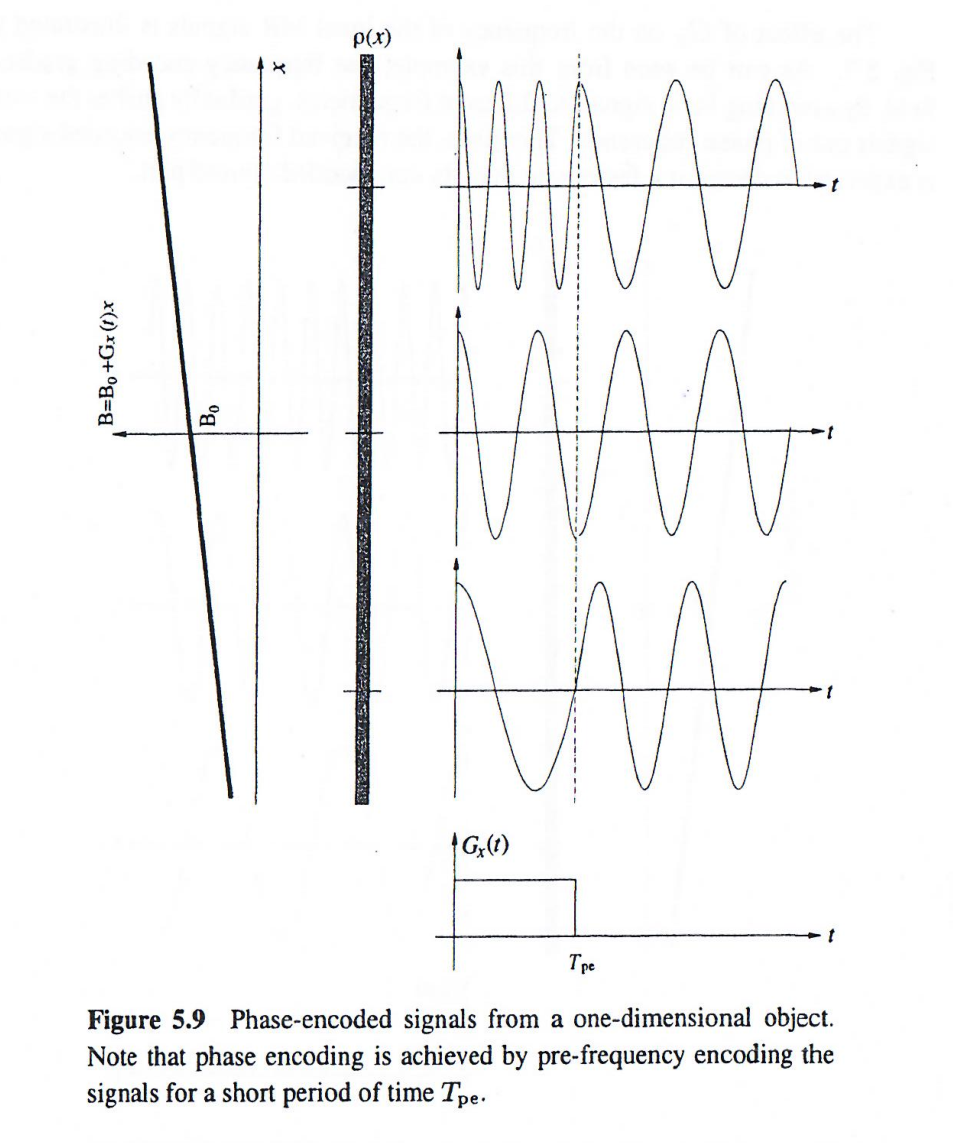
为了说得更加明白一点,我们继续考虑一维情况,在射频脉冲后开启持续时间为TpeT_{\text{pe}}Tpe的梯度GxG_xGx,然后关闭梯度,此时的信号为:
dS(x,t)={ρ(x)e−iγ(B0+Gxx)t0≤t≤Tpeρ(x)e−iγGxxTpee−iγB0tTpe≤t(5.57)
dS(x,t) =
\begin{cases}
\rho(x) e^{-i\gamma(B_0 + G_x x)t} & 0 \leq t \leq T_{\text{pe}} \\
\rho(x) e^{-i\gamma G_x x T_{\text{pe}}} e^{-i\gamma B_0 t} & T_{\text{pe}} \leq t
\end{cases} \tag{5.57}
dS(x,t)={ρ(x)e−iγ(B0+Gxx)tρ(x)e−iγGxxTpee−iγB0t0≤t≤TpeTpe≤t(5.57)
在时间间隔 TpeT_{\text{pe}}Tpe 后,来自不同 xxx 位置的信号积累了不同的相位角:
ϕ(x)=−γGxxTpe(5.58)
\phi(x) = -\gamma G_x x T_{\text{pe}} \tag{5.58}
ϕ(x)=−γGxxTpe(5.58)
由于 ϕ(x)\phi(x)ϕ(x) 与信号位置 xxx 线性相关,我们称其为相位编码。 GxG_xGx被称为相位编码梯度,TpeT_{\text{pe}}Tpe 为相位编码间隔。
可以看到频率编码和相位编码的区别在于:频率编码一旦结束,不同位置的信号就会具备不同的相位角,这个相位角也是随空间位置不同而不同,就形成了相位编码,所以相位编码相当于给了不同位置的信号以不同的初态(初始相位角)。如下图所示:
对于多维物体,通过同时在相位编码期间开启 GxG_xGx、GyG_yGy 和 GzG_zGz 可沿任意方向进行相位编码:
Gpe=(Gx,Gy,Gz),0≤t≤Tpe(5.59)
\mathbf{G}_{\text{pe}} = (G_x, G_y, G_z), \quad 0 \leq t \leq T_{\text{pe}} \tag{5.59}
Gpe=(Gx,Gy,Gz),0≤t≤Tpe(5.59)
初始相位角为:
ϕ(r)=−γGpe⋅rTpe(5.60)
\phi(\mathbf{r}) = -\gamma \mathbf{G}_{\text{pe}} \cdot \mathbf{r} T_{\text{pe}} \tag{5.60}
ϕ(r)=−γGpe⋅rTpe(5.60)
接收到的信号是所有局部相位编码信号之和:
S(t)=∫objectdS(r,t)=[∫objectρ(r)e−iγGpe⋅rTpedr]e−iω0t(5.61)
S(t) = \int_{\text{object}} dS(\mathbf{r},t) = \left[ \int_{\text{object}} \rho(\mathbf{r}) e^{-i\gamma \mathbf{G}_{\text{pe}} \cdot \mathbf{r} T_{\text{pe}}} d\mathbf{r} \right] e^{-i\omega_0 t} \tag{5.61}
S(t)=∫objectdS(r,t)=[∫objectρ(r)e−iγGpe⋅rTpedr]e−iω0t(5.61)
解调(即去除载波信号 e−iω0te^{-i\omega_0 t}e−iω0t)后,得到
S(t)=∫objectdS(r,t)=∫objectρ(r)e−iγGpe⋅rTpedr
S(t) = \int_{\text{object}} dS(\mathbf{r},t) =\int_{\text{object}} \rho(\mathbf{r}) e^{-i\gamma \mathbf{G}_{\text{pe}} \cdot \mathbf{r} T_{\text{pe}}} d\mathbf{r}
S(t)=∫objectdS(r,t)=∫objectρ(r)e−iγGpe⋅rTpedr