Boost电路项目实战:从原理到实战全解析(含电流环电压环)
1. 分立开关电源_BOOST基本工作原理(电压环)
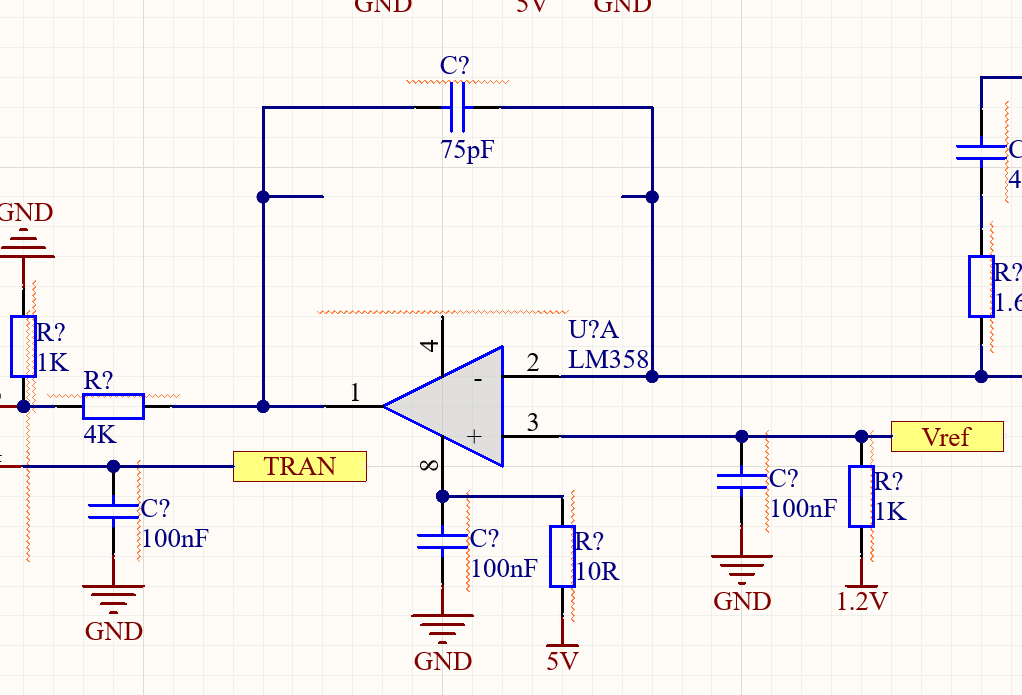
a. 工作原理
开关管导通时电感储能,关断时电感释放能量经二极管升压后给负载和电容供电,实现输出电压高于输入。
b. 缓启动
给运放接 RC 延时启动,避免一上电就比较,输出大电流
2. 分立开关电源_BOOST主回路元器件选型
a. 电阻
| 选型参数 | 确定依据 |
| 阻值 | 看电路图 |
| 封装 | 看额定功率和空间大小 |
| 额定功率 | 1.5~2 倍余量 |
| 温度 | 工业级基本够用 |
| 工作电流 | 1.5~2 倍余量 |
| 工作电压 | 1.5~2 倍余量 |
| 精度 | 常用 ±5%,有分压/放大需求选 ±1%,测试精度更高 |
b. 电感
感值
工作电流
平均电流((输入电压*平均电流)*效率=(输出电压*输出电流))
纹波电流(平均电流*0.2~0.4)
最大电流(平均电流+纹波电流)

c. 电容
容值
ESR
耐压

d. 二极管
工作电流
耐压
开关速度
温度=25+P*(占空比)*热功率
e. 运放
| 运放参数 | 计算/确定方式 |
| 输入失调电压(Vos) | 输入电压/1000(具体需以器件手册标称值为准) |
| 输入偏置电流(Ib) | 输入电流/1000(具体需以器件手册标称值为准) |
| 压摆率(SR) | SR ≥ 2πfVpp(f=信号频率,Vpp=输出信号峰峰值) |
| 增益带宽积(GBP) | GBP≥ 信号频率*增益需求*(5-10 倍余量) 环路压带宽,根本用不到这么高频率😅 |
| 开关速度 | 下面写了 |
| 轨对轨特性 | 啊对对对 |
| 供电范围 | 差不多得了 |
f. 比较器
哈哈哈
g. MOS 管
工作电流
耐压
开关速度
温度=25+P(I*I*Rdson*2)*(占空比)*热功率
h. MOS 驱动
通用+特殊参数
工作速度
MOS 驱动(5~10 倍于 MOS 管)>MOS 管(5~10 倍于最小占空比)>肖特基二极管>比较器(5~10 倍于运放)>运放(5~10 倍快于开关频率 and 交叉频率,压带宽)
电流倒灌条件 “反向压差 + 未及时关断的路径”
i. 器件选取模型
| 分类 | 核心参数类型 | 典型参数示例 | 选型逻辑 |
| 通用参数 | 所有器件共需满足的基础条件 | 工作电压 / 电流、耐压值、额定功率、工作温度范围、封装尺寸、精度 | 先满足 “生存条件”:不超出器件极限值 |
| 特殊参数 | 依功能 / 场景而定的关键参数 | 半导体:开关速度(二极管 / MOS)、SR/GBP/VOS(运放)、导通电阻(MOS) | 再匹配 “性能需求”:核心指标达标 |
3. 分立开关电源_BOOST控制环路改进及防护电路设计
懒得写
4. 分立开关电源BOOST_LAYOUT注意事项
看笔记本
5. 分立开关电源BOOST_环路补偿原理!!!
a. 为什么要环路补偿
减小震荡,维持系统稳定,确保输出电压在输入 / 负载变化时快速、无超调地回到设定值。
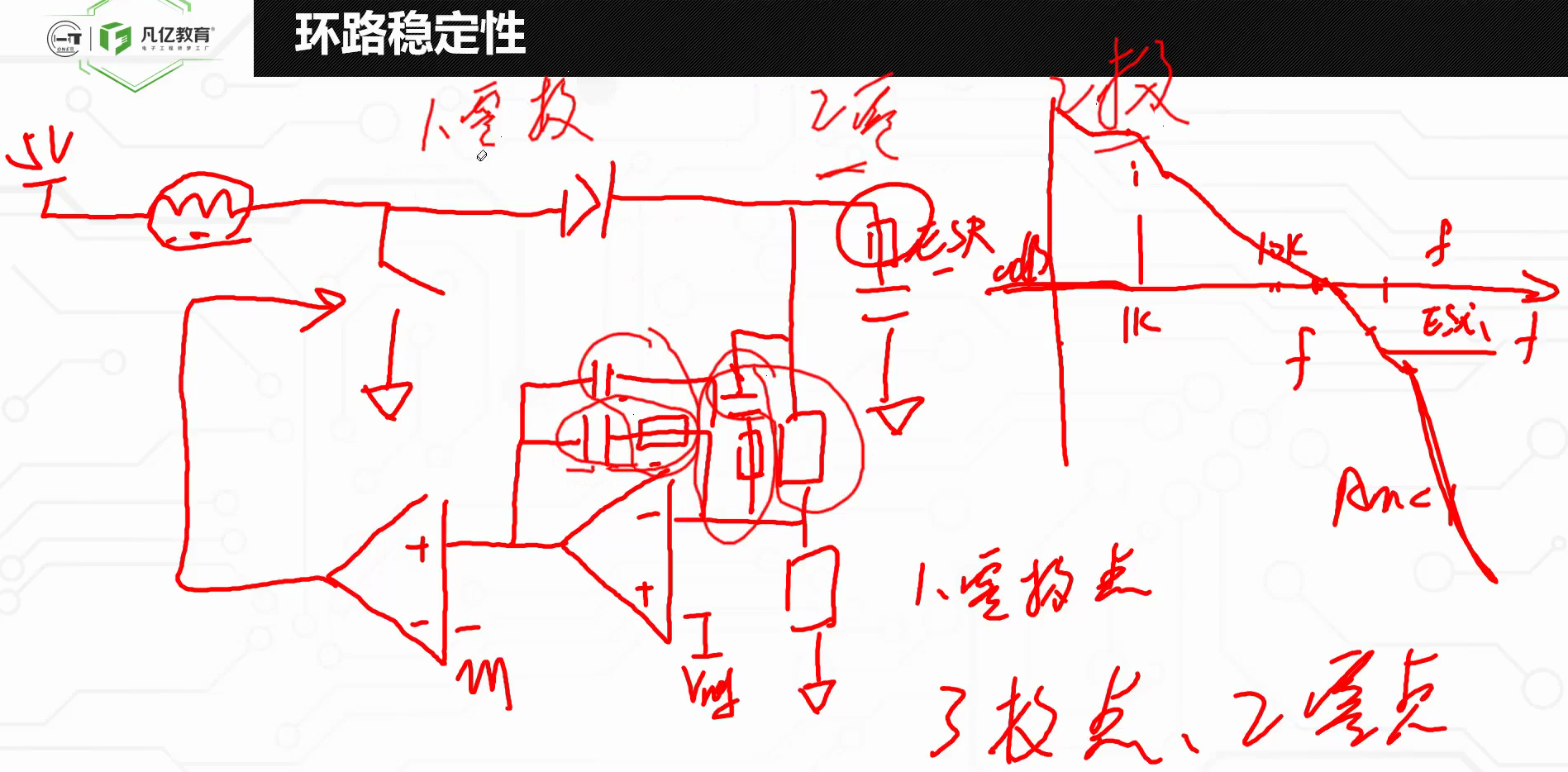
b. 震荡的成因
增益大于 0db 且相位延迟达到 180°
c. 震荡的本质
反馈速度(反馈太慢)跟不上主控速度(主控太快)
d. 解决震荡的方法
ⅰ. 1 降低主控速度
ⅱ. 2 提升反馈速度
e. 分析
ⅰ. 1 如何降低主控速度
负反馈网络接电容,随着频率的升高,高频信号通过负反馈网络减小输入,从而降低增益,从而抑制高频震荡,限制环路带宽,从而让系统对高频信号的响应能力下降,从而降低主控速度(控制系统对输入信号变化、负载扰动或参考值调整的响应快慢能力,由 “环路带宽” 和 “相位裕度” 共同决定)。
同时负反馈网络接电容会引入零极点。
ⅱ. 2 如何提升反馈速度
1. 分析什么导致延迟
1.LC 双极点

2.走线寄生电容与电阻组成的 RC 滤波网络
2. 解决延迟
1.补偿双零点
2.好好走线,减小寄生电容
f. 极点与零点与相位裕度的本质
ⅰ. 极点和零点的本质
零点与极点是一个概念,是是描述电路 / 系统 “响应快慢、稳定与否” 的核心指标。
ⅱ. 相位裕度的本质和定义
相位裕度是衡量系统 “离不稳定只差多少相位滞后” 的安全余量。
相位裕度的定义:开环增益降至0dB时,系统实际的相位滞后,与 “导致系统不稳定的 180° 相位滞后” 之间的差值,即 “稳定缓冲余量”。
ⅲ. 极点和零点影响
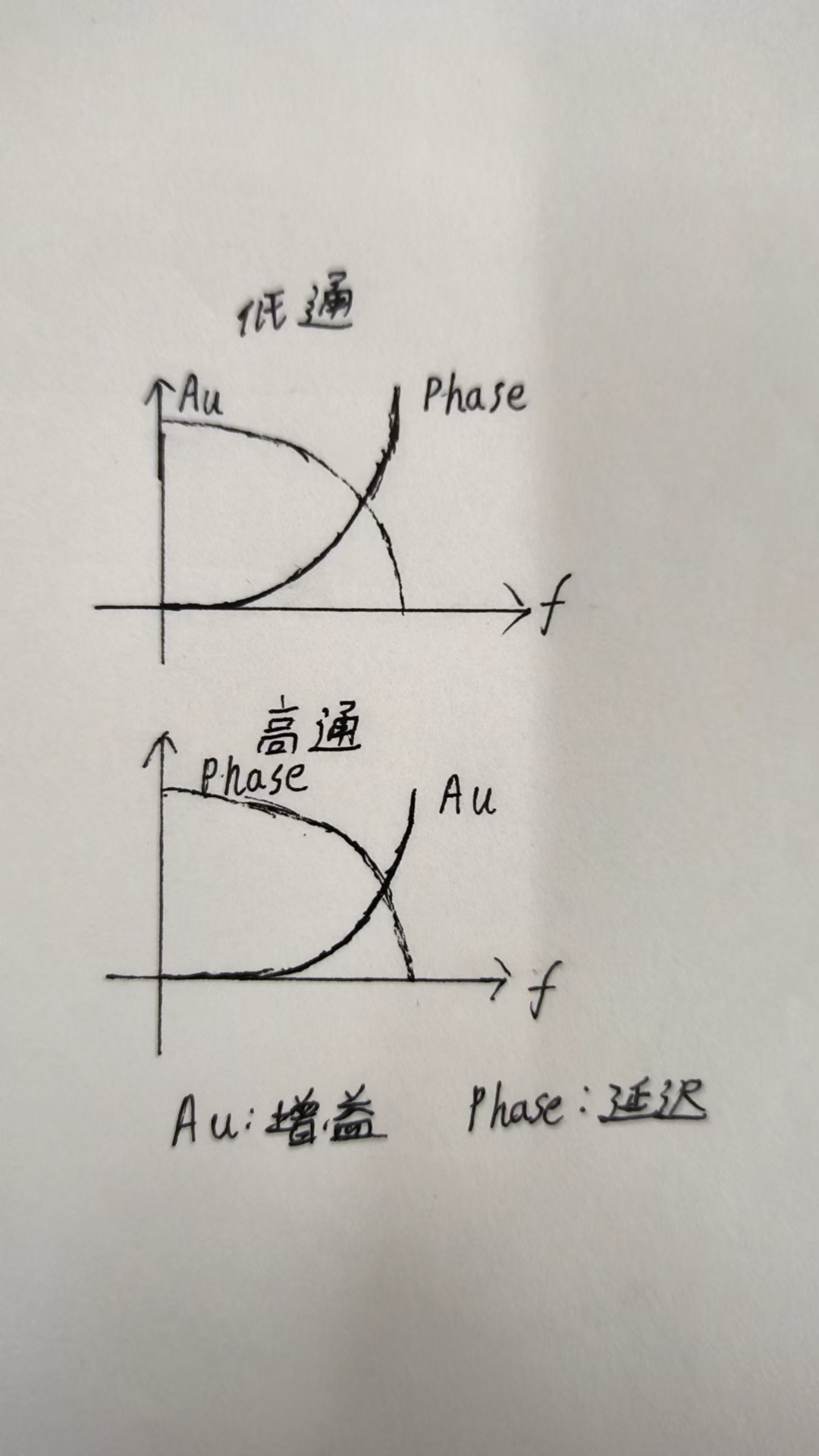
1. 低通滤波
低通滤波是极点的载体,会使电路滞后,增益随着频率升高而减小,表现在图像中就是增益曲线顺时针旋转 20 °,同时使相位裕度减小(滞后),
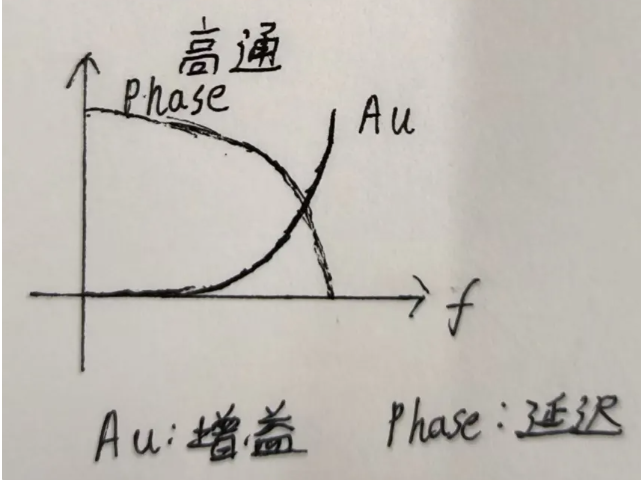
2. 高通滤波
高通滤波是零点的载体,会使电路提前,增益随着频率升高而放缓,表现在图像中就是增益曲线逆时针旋转 20 °,同时使相位裕度增加(提前),
ⅳ. 图解
g. 补偿双零点
ⅰ. 方法一
1.计算双极点频率
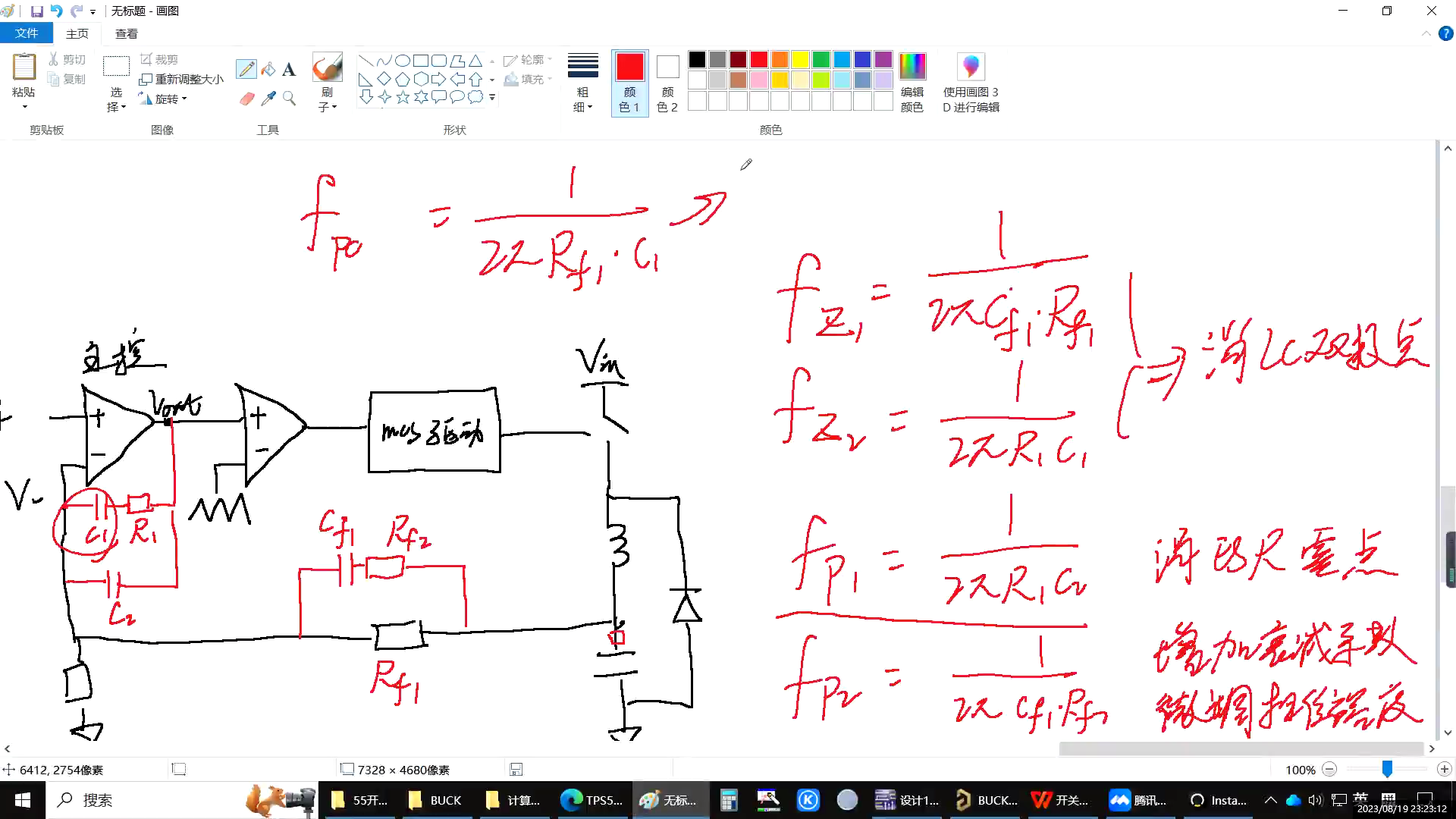
2.结束双零点频率
3.设置补偿网络取值
ⅱ. 方法二
套表格
📎开关电源环路计算辅助表格.xlsx
ⅲ. 注意事项
- 当取的穿越频率(1/5 右半平面零点频率)小于双极点频率时,双极点可忽略
- 双零点要分别分布在双极点两边
h. 结果
环路被补偿,震荡现象减小。
i. 补偿双极点
懒得写了
ⅰ. 极点一
大概就是电容存在 ESR 会降低高频段的增益的衰减
ⅱ. 极点二
还有一个是为了增加高频段的增益的衰减,狠狠的衰减高频段的信号
ⅲ. 极点三
也可以在穿越频率时补偿一个极点,控制相位裕度在 45°左右
6. 分立开关电源BOOST_如何解决右半平面零点
a. 什么是右半平面零点(RHP 零点)
电路动态过程中,因电感电流与电容电压的相互作用,在复平面右半区形成的特殊 “频率点”
不同于零点和极点,RHP 通常是增益和延迟同步上升的,对电路的危害更大。
b. 右半平面零点的成因
突然带大负载,电流突增时,电源的输出电压下降,电源的输出电压通过分压电阻分压后小于基准电压,使运放的输出电压升高,运放的输出电压与三角波比较,提高占空比,mos 管关断时间增加
然而开通和关断的总时间不变,电感续流时间增加,而放电时间减少,导致放电时间不足
导致电源的输出电压进一步下降,陷入恶性循环。
c. 如何解决右半平面零点
1. 方法一降低主控速度
负反馈网络接电容,压带宽到五分之一右半平面零点频率
2. 方法二工作在断续模式
看下面
7. 分立BOOST调试,如何让BOOST一直工作在断续模式
很简单,只要保证每个开关周期内,电感电流都能降到零。
比如说:
- 减电感:减小电感值,缩短能量释放时间
8. 分立BOOST_电流控制模式工作原理(电流环)
电流环有平均电流检测和峰值电流检测模式,这里主要讲平均电流检测。
| 维度 | 平均电流检测 | 峰值电流检测 |
| 检测量 | 平均值 | 峰值 |
| 电路 | 需滤波,较复杂 | 无滤波,简单 |
| 精度 | 高 | 较低(易受噪声影响) |
| 稳定性 | 好(无次谐波振荡) | 差(轻载/占空比>50%易振荡) |
| 响应 | 稍慢(滤波延迟) | 快(无延迟) |
| 应用 | 高精度场景(如LED驱动) | 简单快响场景(如普通DC-DC) |
多了一个电流环来专门控制电感的电流,使其变成受控量,同时使电路简化成一阶电路
9. 分立BOOST_ 电流控制模式主回路参数计算及选型
和电压环差不多,电感的工作电流增加了
10. 分立BOOST_电流控制模式控制回路参数计算及选型
控制回路多了个远放,实现采样电压与电压环检测电压的比较。
11. 分立BOOST_电流控制模式主回路调试
12. 电流控制模式分立BOOST_控制环路调试
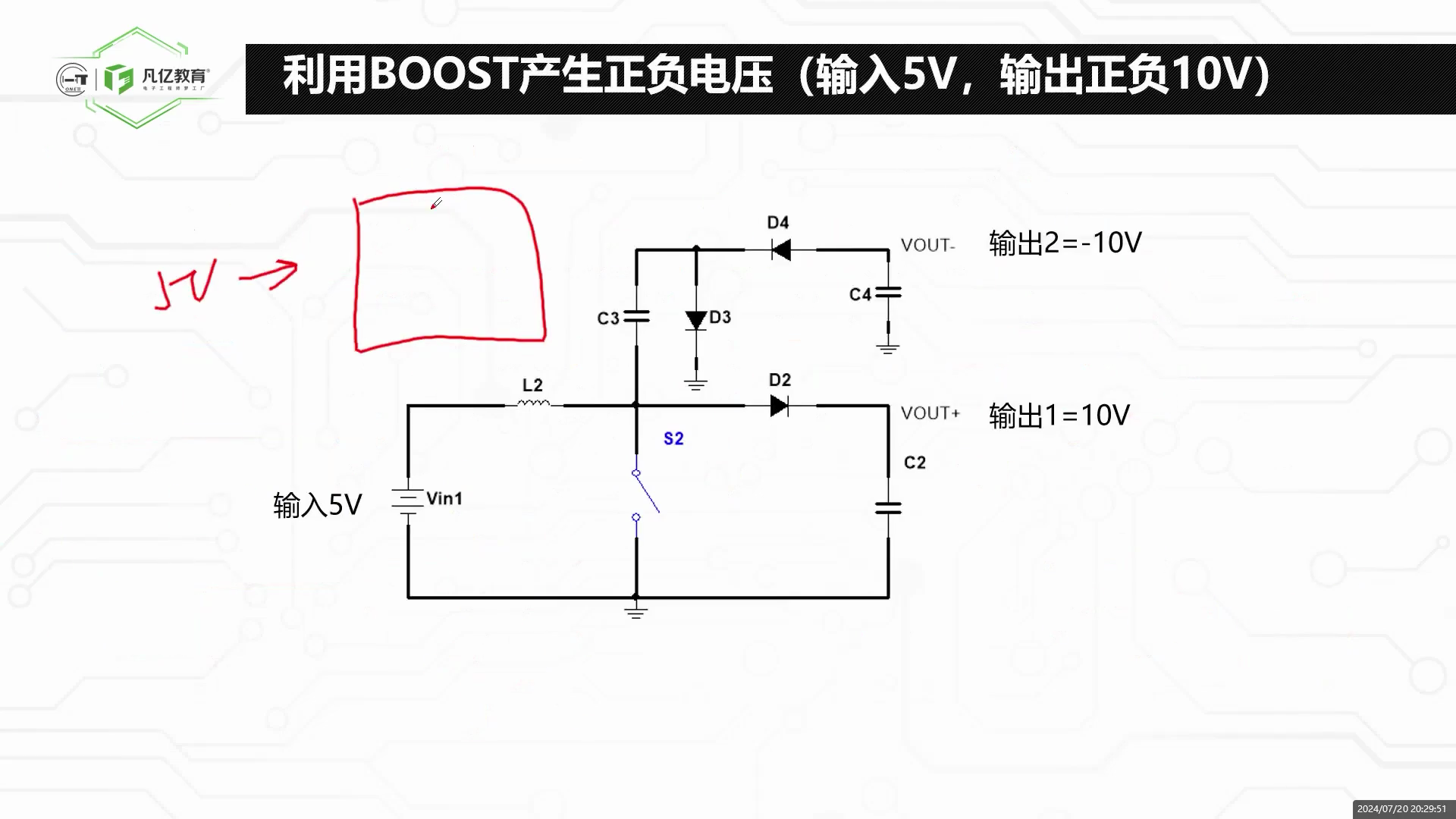
13. 负压
二极管钳位
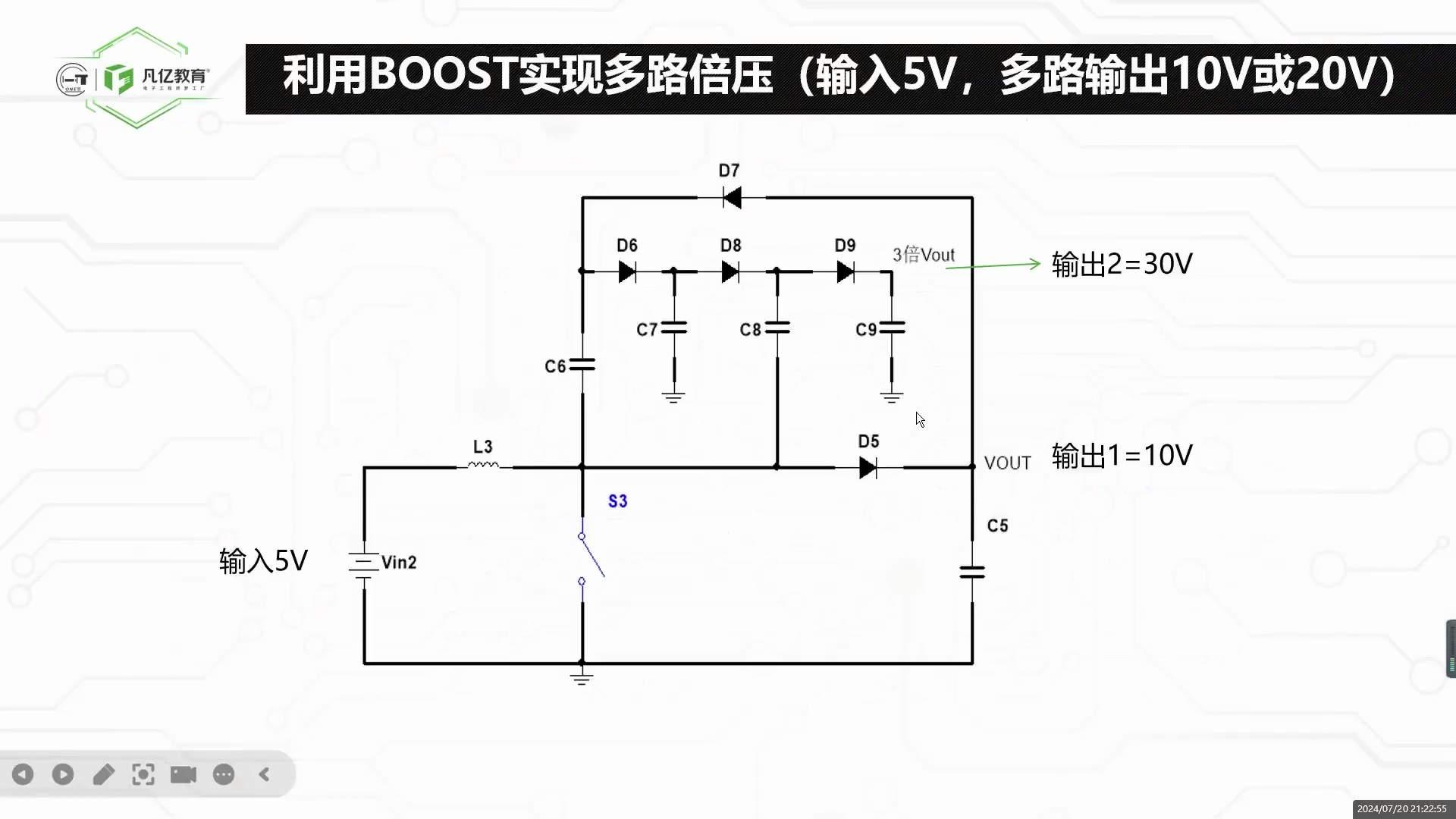
14. 倍压
和电荷泵差不多
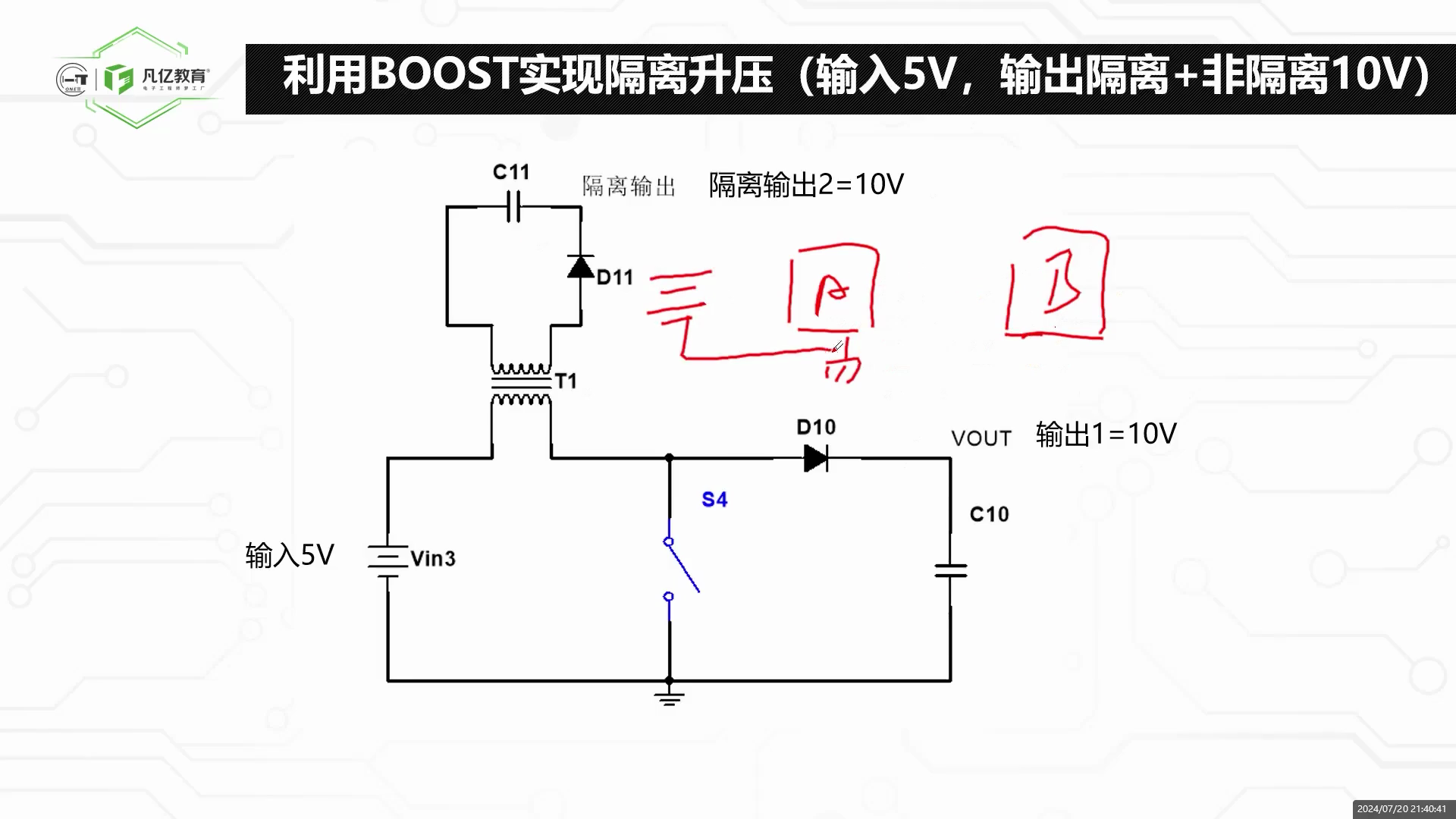
15. 隔离
变压器隔离
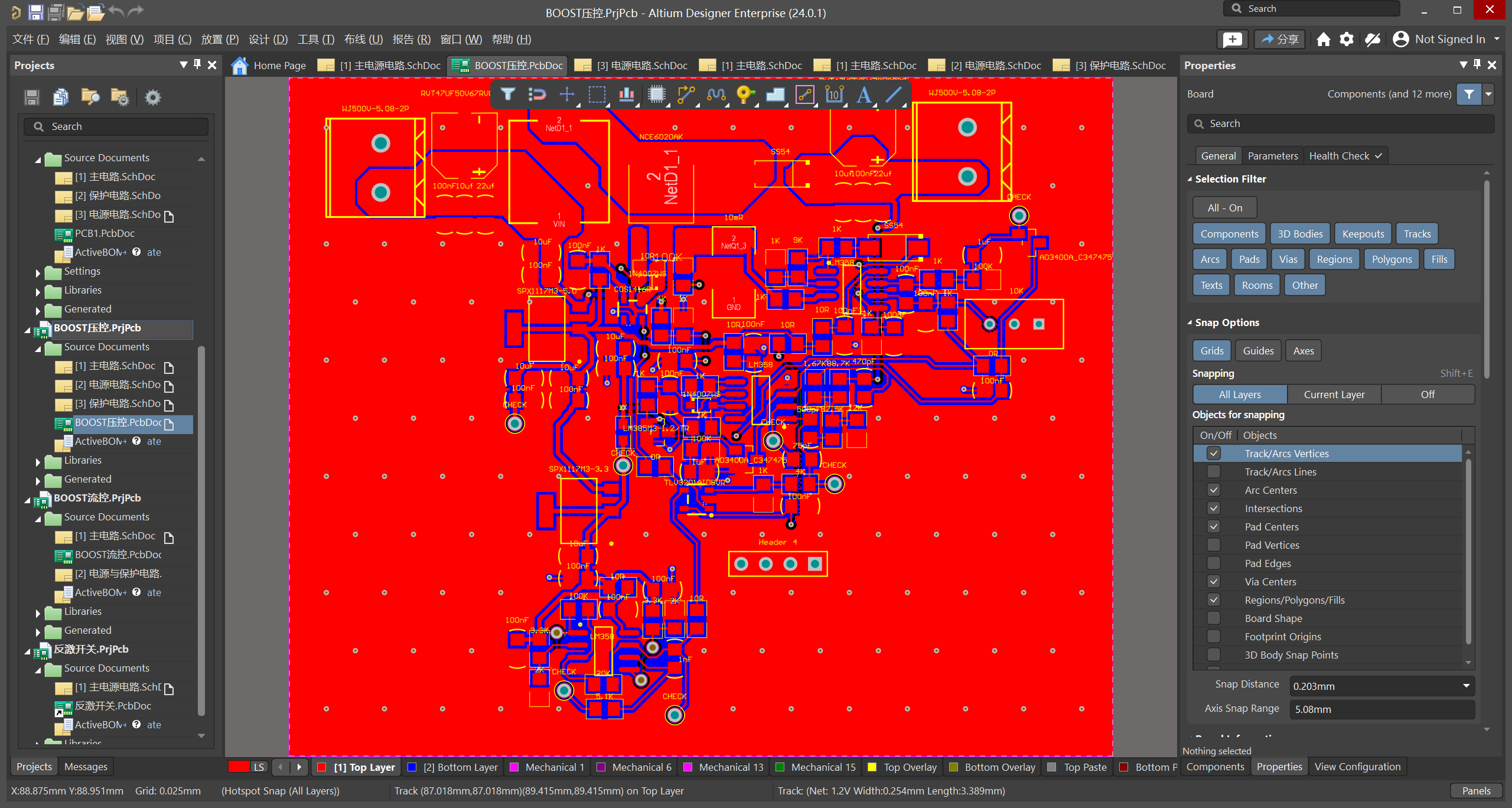
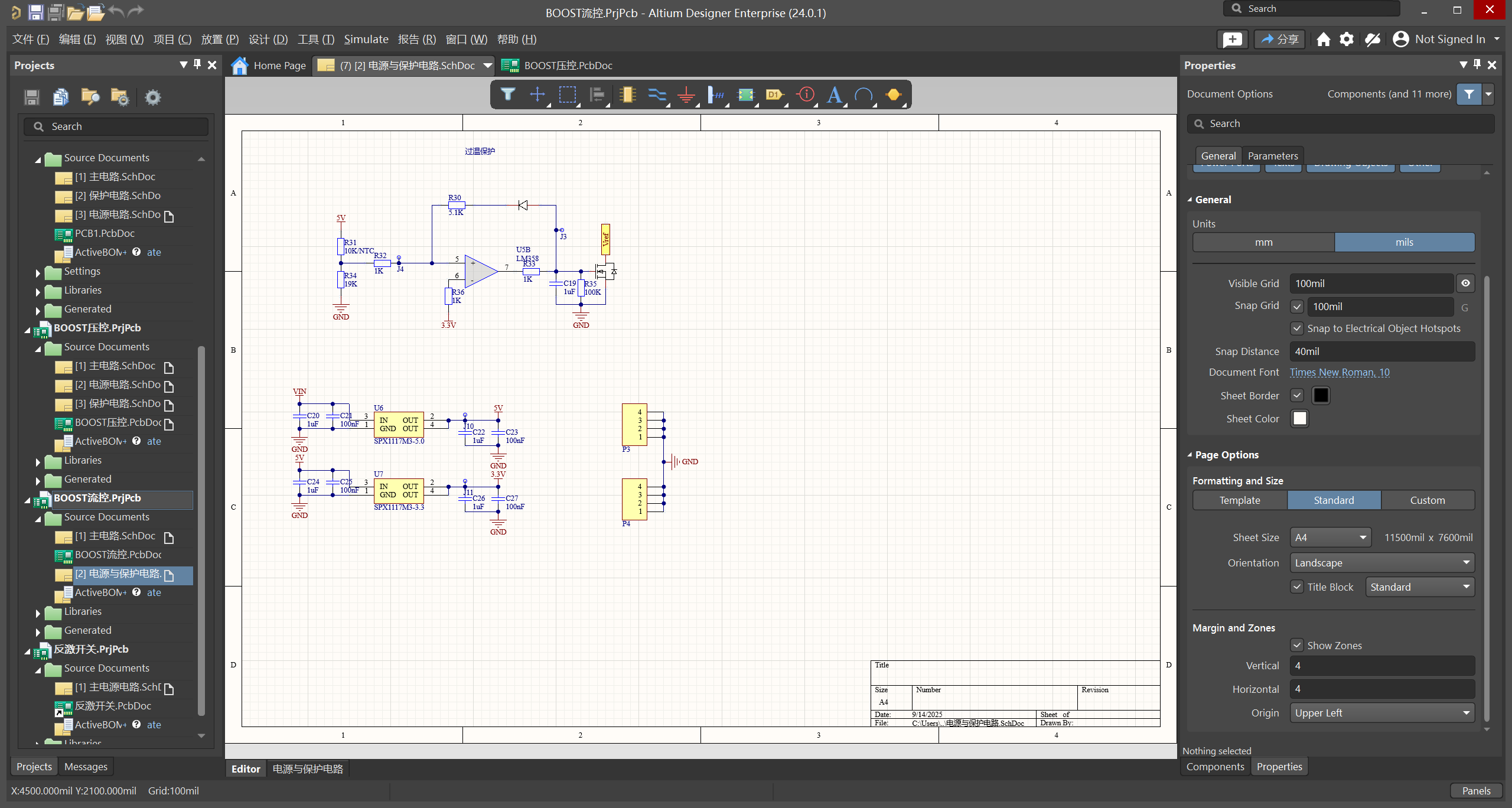
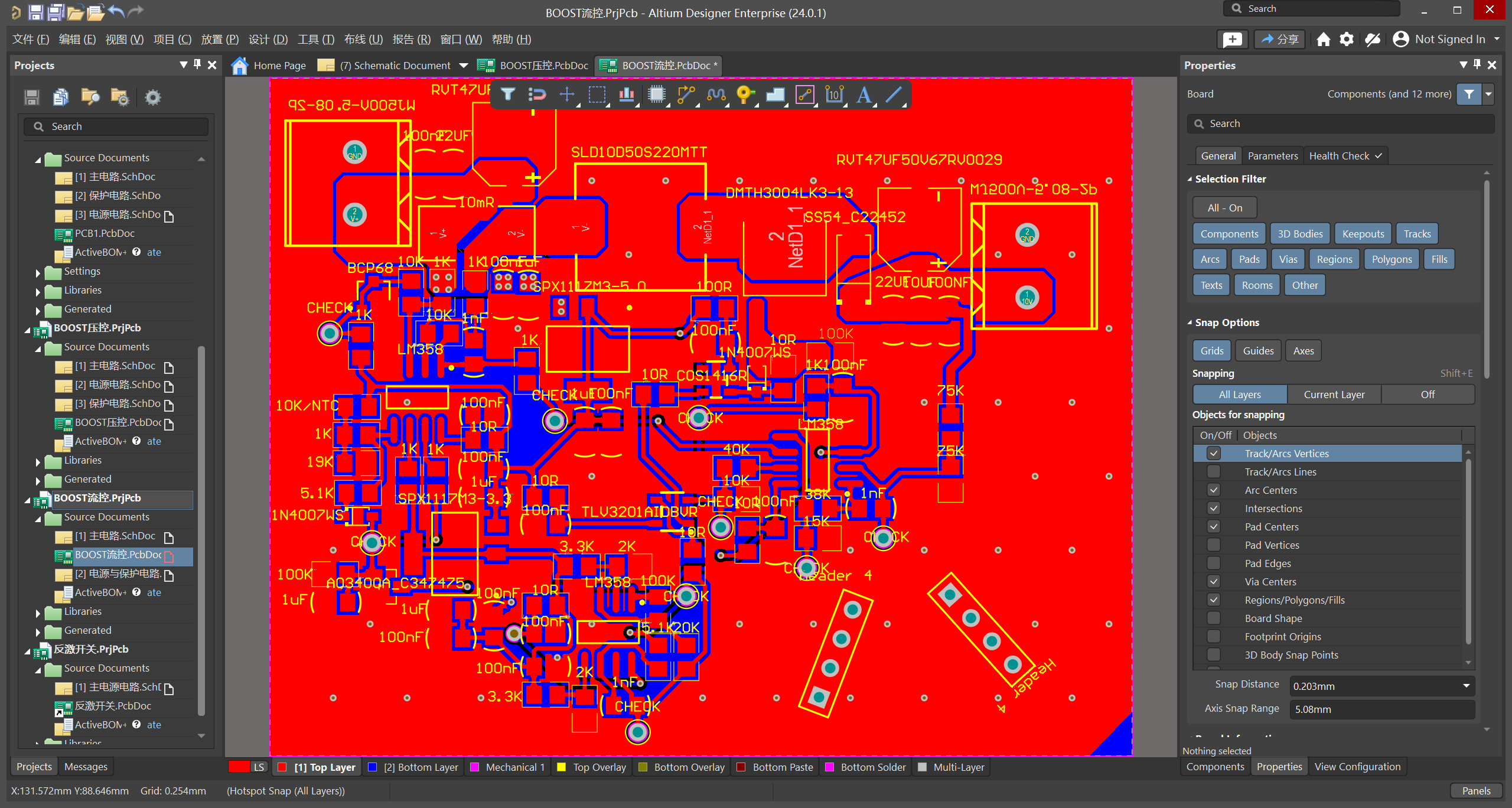
16. 电压环
ⅰ. 原理图
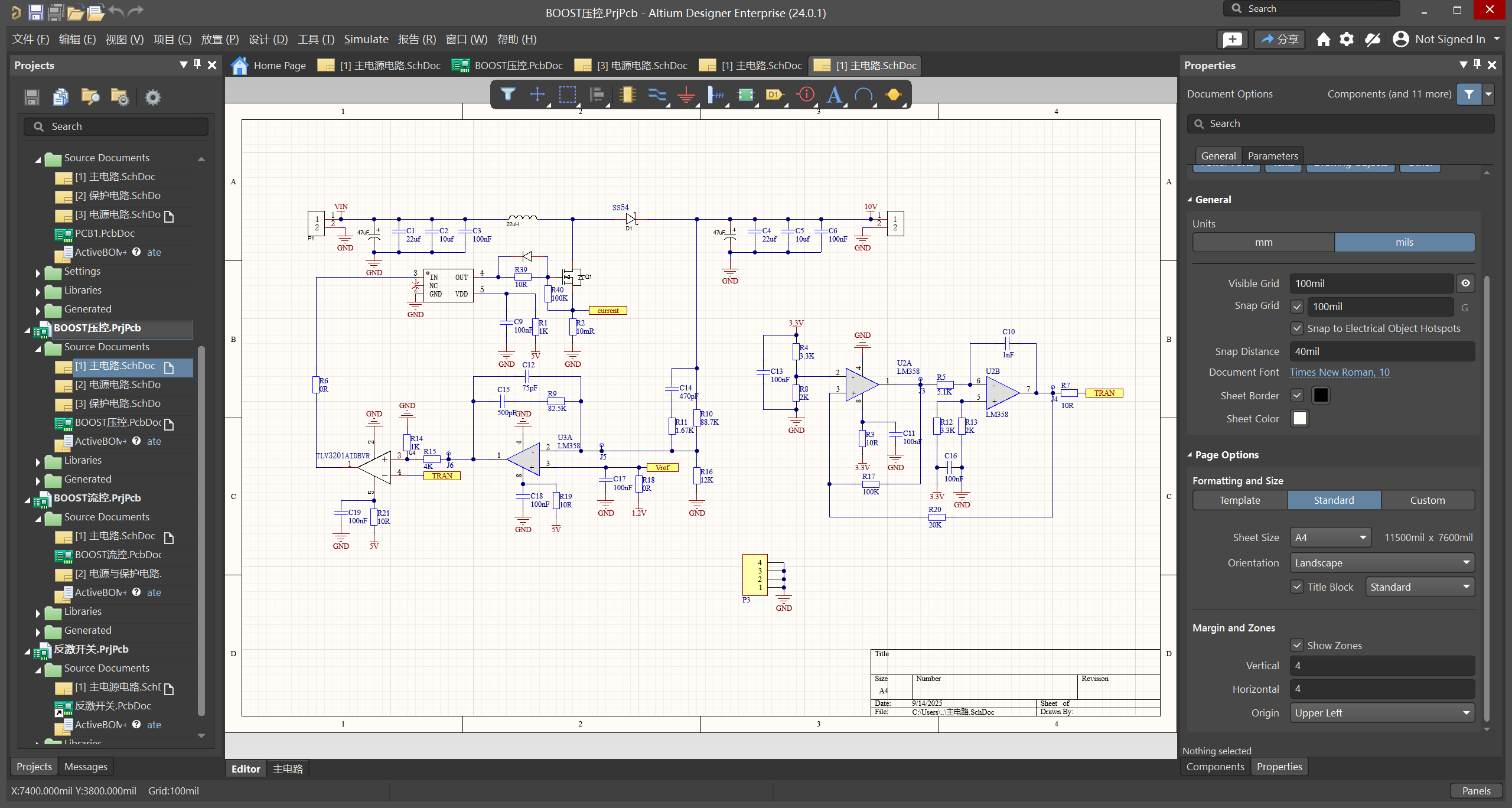
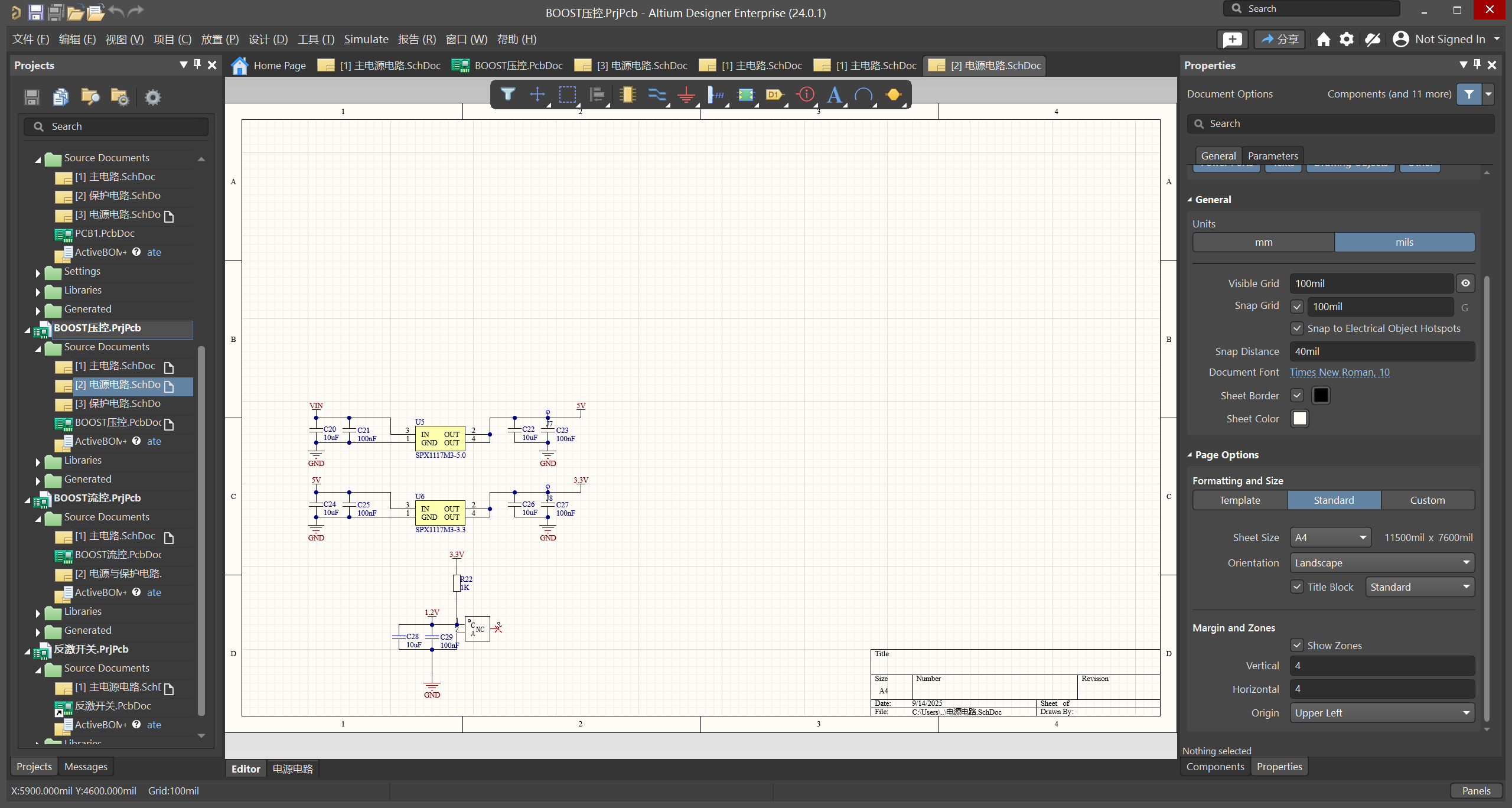
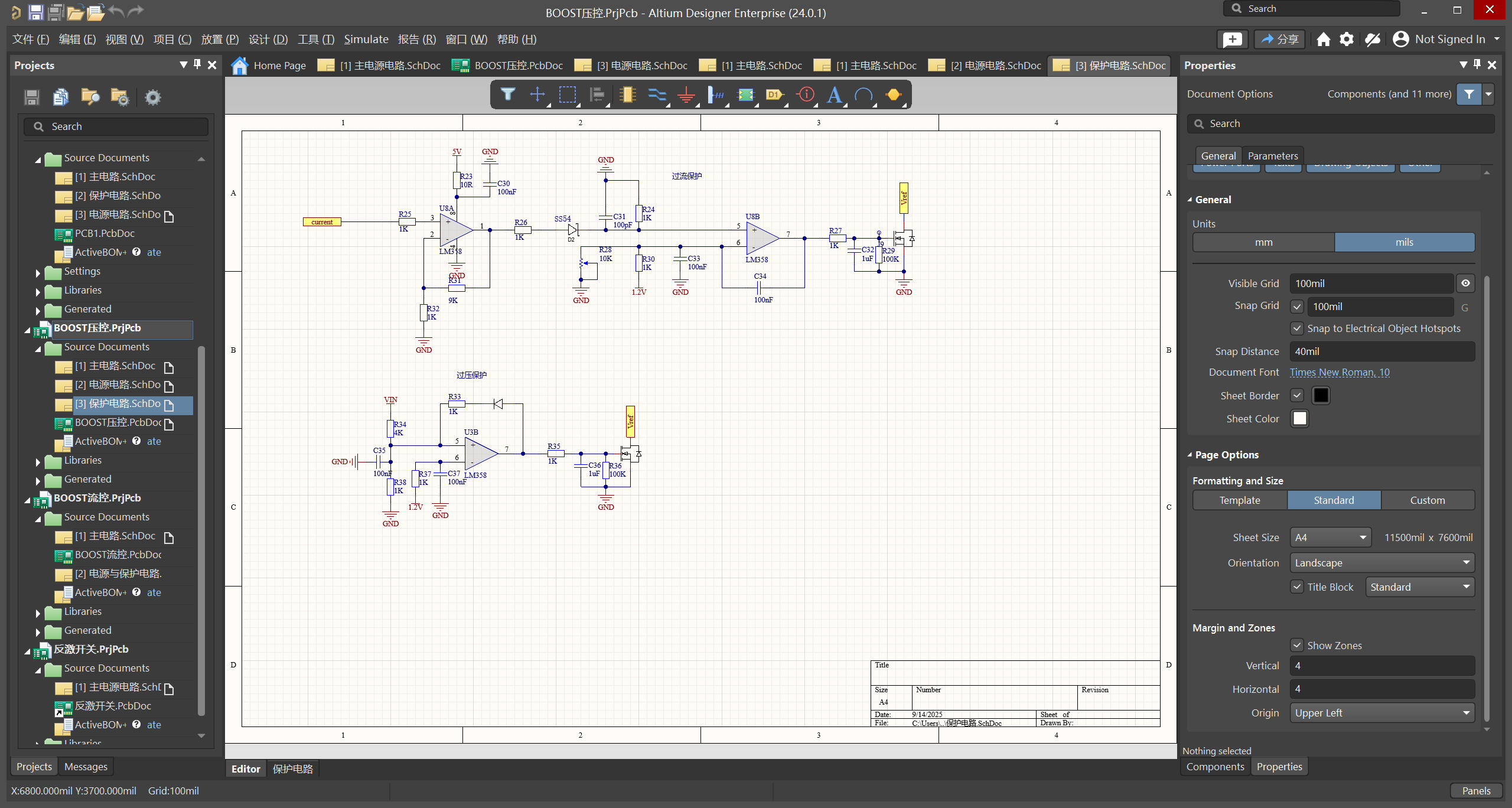
PCB
17. 电流环
ⅰ. 原理图
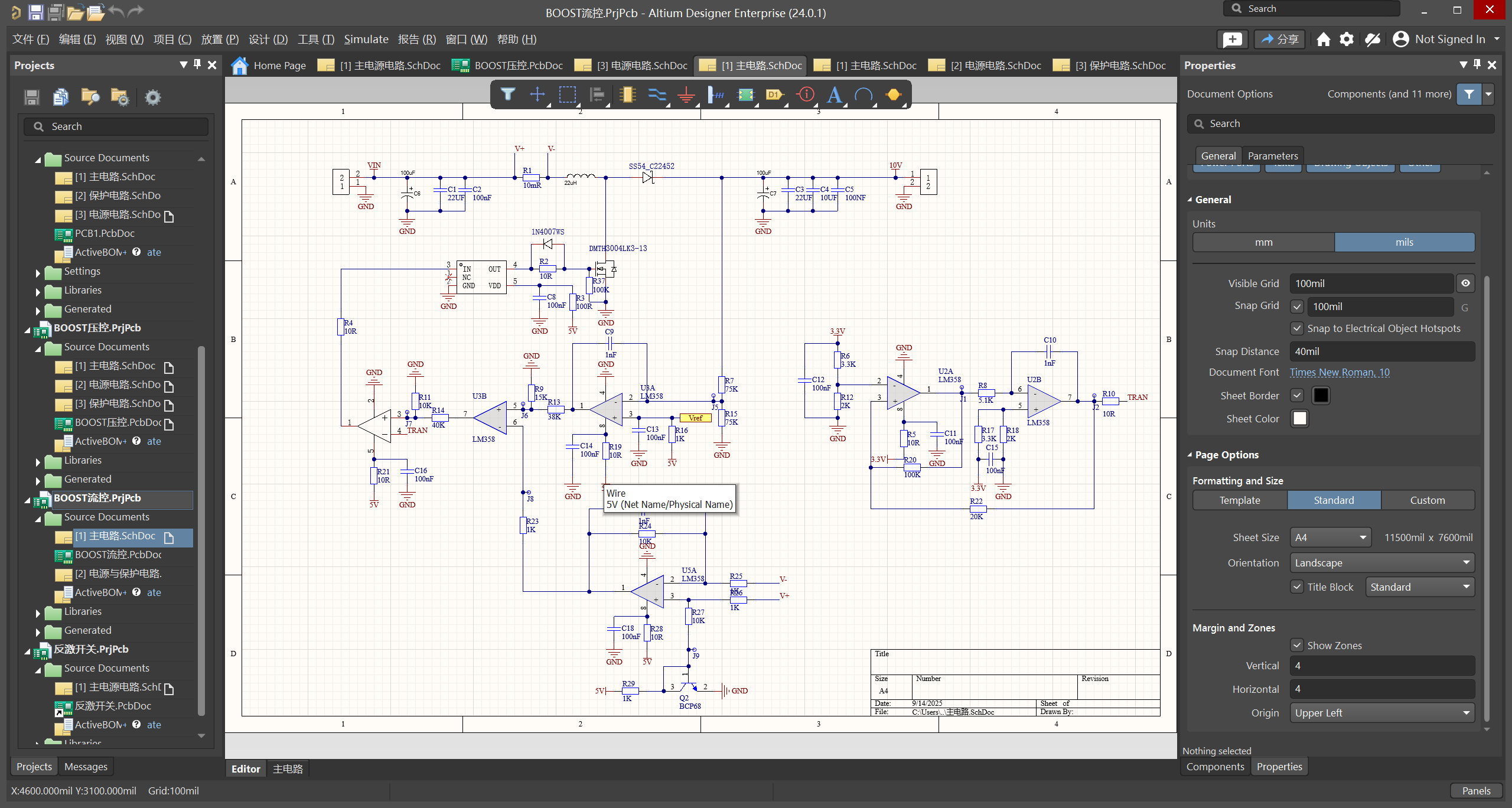
PCB
18.调试
自己打板焊接出来调试