通用性AI大模型辅助本科机器人课程完成编程项目的可靠性分析
↓不可行案例展示↓
演示失败罚站80分钟的惨痛经历-25-26-1-CSDN博客
↑不可行案例展示↑
这里使用的并非专业大模型编程工具,而是网页打开就用的对话大模型。
结论:
- 目标单一且明确的项目可以顺利完成
- 综合多个目标需要权衡的项目提示词不合适无法完成,提示词合适单次成功了低
- 与实际系统结合项目给出的参数修改和算法调试案例,仅具备理论参考价值,实际效果差
免费和一分钟上手是所有课程研发的初衷。相关分享如下:
- 蓝桥云课:ROS 机器人操作系统初级教程_ROS - 蓝桥云课
- 微控制器:zhangrelay @ Wokwi
摘要:本文探讨了ROS机器人操作系统和微控制器开发中的可行与不可行案例。不可行案例展示了使用非专业对话大模型工具进行复杂项目开发时的问题,强调目标单一的项目更容易成功。可行案例包括ROS交互式标记控制和Turtlesim运动控制,以及微控制器精简功能实现,这些案例成功率接近100%。技术分析部分详细比较了四元数与欧拉角的优劣,指出四元数在解决万向节死锁、运算效率和插值平滑性方面的优势,并分析了万向节死锁的发现场景和本质原因。
蓝桥云课可行案例
非综合性实验成功率接近100%
案例1
rosrun interactive_marker_tutorials pong运行后rviz中看不到所需要的效果,是空的
如果在运行 rosrun interactive_marker_tutorials pong 后,RViz 中没有显示预期的交互式标记(Interactive Marker)效果,可能是由于以下几个常见原因导致的。以下是详细的排查和解决方法:
1. 检查 ROS 节点是否正常运行
-
确认节点是否启动:
bashrosnode list确保输出中包含
/pong节点。如果没有,可能是程序崩溃或未正确启动。 -
查看节点日志:
bashrosrun interactive_marker_tutorials pong直接运行命令(而非通过
rosrun),观察终端是否有错误输出(如缺少依赖、参数错误等)。
2. 检查 RViz 配置
- 添加
InteractiveMarkers显示插件:- 在 RViz 左侧的
Displays面板中,点击Add。 - 选择
By topic或By display type,找到InteractiveMarkers并添加。 - 确保
Topic字段设置为/pong/update(默认话题名,可通过rostopic list确认)。
- 在 RViz 左侧的
- 检查参考坐标系(Fixed Frame):
- 在 RViz 的
Global Options中,将Fixed Frame设置为与标记发布一致的坐标系(如base_link或map)。如果标记发布在/pong节点中使用了特定坐标系,需保持一致。
- 在 RViz 的
3. 验证话题是否发布
-
确认话题是否存在:
bashrostopic list检查是否有
/pong/update或类似话题(如/basic_controls)。 -
查看话题内容:
bashrostopic echo /pong/update如果终端有持续输出,说明节点在发布标记数据;若无输出,可能是节点未正确发布。
4. 检查依赖和安装
-
确保安装了
interactive_markers包:bashrospack find interactive_markers如果未安装,执行:
bashsudo apt-get install ros-<distro>-interactive-markers(将
<distro>替换为你的 ROS 版本,如noetic或melodic) -
检查教程包是否完整:
bashroscd interactive_marker_tutorials如果目录不存在,重新安装教程包:
bashsudo apt-get install ros-<distro>-interactive-marker-tutorials
5. 调试代码(可选)
如果上述步骤无效,可能是代码逻辑问题。可以:
- 查看源码:
bash
检查标记初始化代码(如rosed interactive_marker_tutorials pong.cppserver.insert()是否被调用)。 - 手动发布测试标记:
使用rostopic pub发布一个简单的InteractiveMarker消息,验证 RViz 是否能正常显示。
6. 其他常见问题
- RViz 版本兼容性:确保 RViz 版本与 ROS 版本匹配(如 ROS Noetic 对应 RViz 1.14+)。
- 防火墙/网络问题:如果是分布式系统,检查
ROS_MASTER_URI和ROS_IP是否配置正确。 - 重启 ROS 核心:
bashkillall roscoreroscore &
快速测试步骤
- 启动
roscore(如果未运行)。 - 运行
pong节点:bashrosrun interactive_marker_tutorials pong - 启动 RViz,添加
InteractiveMarkers插件,并设置正确的话题和坐标系。
如果问题仍未解决,建议提供以下信息以便进一步排查:
- ROS 版本(如
melodic、noetic)。 - 终端输出的错误信息。
- RViz 的截图或日志。
希望这些步骤能帮助你解决问题!
案例2
#!/usr/bin/env python
import rospy
from interactive_markers.interactive_marker_server import InteractiveMarkerServer
from visualization_msgs.msg import InteractiveMarker, InteractiveMarkerControl, InteractiveMarkerFeedback
from geometry_msgs.msg import Twist, PoseStamped
from math import copysignclass TurtleController:def __init__(self):rospy.init_node("turtle_interactive_controller")# Initialize Interactive Marker serverself.server = InteractiveMarkerServer("turtle_control_marker")self._create_interactive_marker()# Initialize Turtlesim velocity publisherself.cmd_vel_pub = rospy.Publisher("/turtle1/cmd_vel", Twist, queue_size=10)# Record last X position to avoid jitterself.last_x = 0.0def _create_interactive_marker(self):"""Create a draggable cube Interactive Marker."""int_marker = InteractiveMarker()int_marker.header.frame_id = "base_link"int_marker.name = "turtle_control_marker"int_marker.description = "Drag to control turtle1"int_marker.pose.position.z = 0.5 # Cube height# Cube visualization (red)control = InteractiveMarkerControl()control.always_visible = Truecontrol.markers.append(self._make_box(int_marker.pose))int_marker.controls.append(control)# Add X-axis translation controlcontrol = InteractiveMarkerControl()control.name = "move_x"control.orientation.w = 1control.orientation.x = 1control.orientation.y = 0control.orientation.z = 0control.interaction_mode = InteractiveMarkerControl.MOVE_AXISint_marker.controls.append(control)# Insert marker into the serverself.server.insert(int_marker, self._marker_feedback_cb)self.server.applyChanges()def _make_box(self, pose):"""Generate a cube marker."""from visualization_msgs.msg import Markermarker = Marker()marker.type = Marker.CUBEmarker.scale.x = 0.2marker.scale.y = 0.2marker.scale.z = 0.2marker.color.r = 1.0marker.color.g = 0.0marker.color.b = 0.0marker.color.a = 1.0marker.pose = posereturn markerdef _marker_feedback_cb(self, feedback):"""Handle Interactive Marker drag events."""if feedback.event_type == InteractiveMarkerFeedback.POSE_UPDATE:current_x = feedback.pose.position.x# Update speed only if position change exceeds threshold (avoids jitter)if abs(current_x - self.last_x) > 0.01:self._update_turtle_speed(current_x)self.last_x = current_xself.server.applyChanges()def _update_turtle_speed(self, x_pos):"""Update turtle1 speed based on cube position."""twist = Twist()# Linear velocity proportional to X position (clamped to max speed)twist.linear.x = copysign(min(abs(x_pos) * 2.0, 2.0), x_pos)self.cmd_vel_pub.publish(twist)def run(self):rospy.spin()if __name__ == "__main__":try:controller = TurtleController()controller.run()except rospy.ROSInterruptException:passrosrun interactive_marker_tutorials simple_marker.py 如何实现立方体前后拖动,控制turtlesim中turtle1进行前进和后退的运动,给出详细python代码。
要实现通过 Interactive Marker 拖动立方体控制 turtlesim 中 turtle1 的前进和后退运动,需结合 interactive_markers 和 rospy 编写一个节点,订阅 InteractiveMarker 的位姿变化并发布 /turtle1/cmd_vel 话题。以下是详细实现步骤和代码:
1. 实现原理
- Interactive Marker:
- 创建一个可拖动的立方体标记(
InteractiveMarker),监听其位姿变化(feedback.pose.position.x)。 - 当立方体沿 X 轴移动时,根据位置正负控制
turtle1的线速度(linear.x)。
- 创建一个可拖动的立方体标记(
- Turtlesim 控制:
- 发布
/turtle1/cmd_vel话题(类型geometry_msgs/Twist),通过linear.x正负值控制前进/后退。
- 发布
2. 完整代码
python
#!/usr/bin/env python | |
import rospy | |
from interactive_markers.interactive_marker_server import InteractiveMarkerServer | |
from visualization_msgs.msg import InteractiveMarker, InteractiveMarkerControl, InteractiveMarkerFeedback | |
from geometry_msgs.msg import Twist, PoseStamped | |
from math import copysign | |
class TurtleController: | |
def __init__(self): | |
rospy.init_node("turtle_interactive_controller") | |
# 初始化 Interactive Marker 服务器 | |
self.server = InteractiveMarkerServer("turtle_control_marker") | |
self._create_interactive_marker() | |
# 初始化 Turtlesim 速度发布者 | |
self.cmd_vel_pub = rospy.Publisher("/turtle1/cmd_vel", Twist, queue_size=10) | |
# 记录上一次的 X 位置,避免抖动 | |
self.last_x = 0.0 | |
def _create_interactive_marker(self): | |
"""创建一个可拖动的立方体 Interactive Marker""" | |
int_marker = InteractiveMarker() | |
int_marker.header.frame_id = "base_link" | |
int_marker.name = "turtle_control_marker" | |
int_marker.description = "Drag to control turtle1" | |
int_marker.pose.position.z = 0.5 # 立方体高度 | |
# 立方体可视化(红色) | |
control = InteractiveMarkerControl() | |
control.always_visible = True | |
control.markers.append(self._make_box(int_marker.pose)) | |
int_marker.controls.append(control) | |
# 添加 X 轴平移控制 | |
control = InteractiveMarkerControl() | |
control.name = "move_x" | |
control.orientation.w = 1 | |
control.orientation.x = 1 | |
control.orientation.y = 0 | |
control.orientation.z = 0 | |
control.interaction_mode = InteractiveMarkerControl.MOVE_AXIS | |
int_marker.controls.append(control) | |
# 将标记添加到服务器 | |
self.server.insert(int_marker, self._marker_feedback_cb) | |
self.server.applyChanges() | |
def _make_box(self, pose): | |
"""生成立方体标记""" | |
from visualization_msgs.msg import Marker | |
marker = Marker() | |
marker.type = Marker.CUBE | |
marker.scale.x = 0.2 | |
marker.scale.y = 0.2 | |
marker.scale.z = 0.2 | |
marker.color.r = 1.0 | |
marker.color.g = 0.0 | |
marker.color.b = 0.0 | |
marker.color.a = 1.0 | |
marker.pose = pose | |
return marker | |
def _marker_feedback_cb(self, feedback): | |
"""处理 Interactive Marker 的拖动事件""" | |
if feedback.event_type == InteractiveMarkerFeedback.POSE_UPDATE: | |
current_x = feedback.pose.position.x | |
# 仅当位置变化超过阈值时更新速度(避免抖动) | |
if abs(current_x - self.last_x) > 0.01: | |
self._update_turtle_speed(current_x) | |
self.last_x = current_x | |
self.server.applyChanges() | |
def _update_turtle_speed(self, x_pos): | |
"""根据立方体位置更新 turtle1 的速度""" | |
twist = Twist() | |
# 线性速度与 X 位置成正比(限制最大速度) | |
twist.linear.x = copysign(min(abs(x_pos) * 2.0, 2.0), x_pos) | |
self.cmd_vel_pub.publish(twist) | |
def run(self): | |
rospy.spin() | |
if __name__ == "__main__": | |
try: | |
controller = TurtleController() | |
controller.run() | |
except rospy.ROSInterruptException: | |
pass |
3. 代码解析
- Interactive Marker 创建:
_create_interactive_marker()定义了一个红色立方体,允许沿 X 轴拖动。_make_box()生成立方体的可视化标记。
- 反馈处理:
_marker_feedback_cb()监听拖动事件,当立方体位置变化超过阈值(0.01)时,调用_update_turtle_speed()。
- 速度控制:
_update_turtle_speed()根据立方体的 X 坐标计算线速度(linear.x),位置为正时前进,为负时后退,速度绝对值最大为2.0。
4. 运行步骤
-
启动
roscore和turtlesim_node:bashroscore &rosrun turtlesim turtlesim_node -
运行控制节点:
bashchmod +x turtle_interactive_control.py # 添加执行权限rosrun your_package_name turtle_interactive_control.py -
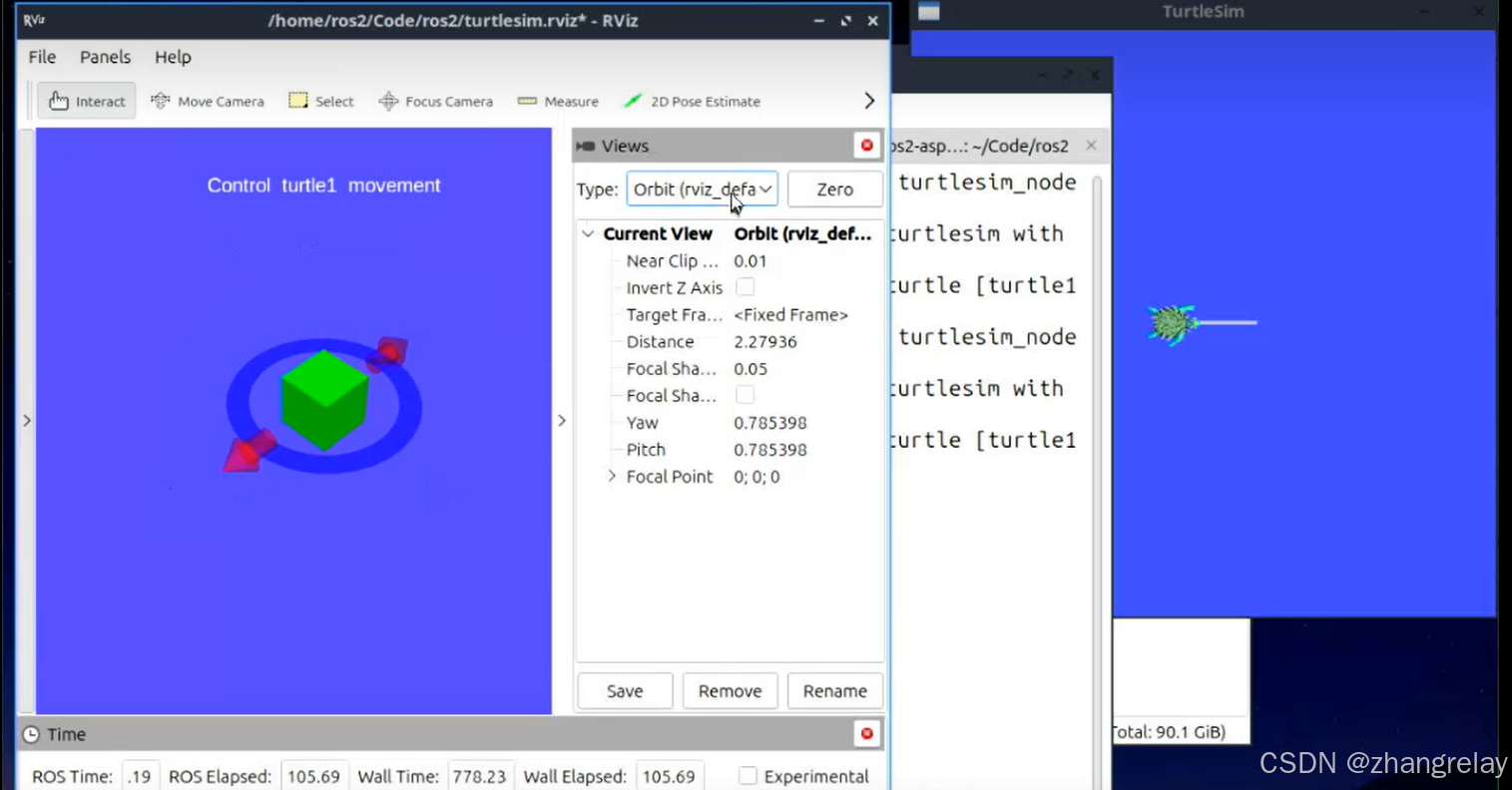
在 RViZ 或
interactive_marker_tutorials中可视化标记(可选):bashrosrun rviz rviz在 RViZ 中添加
InteractiveMarkers显示,选择/turtle_control_marker/update话题。
5. 效果
- 拖动立方体沿 X 轴移动时,
turtle1会实时前进或后退。 - 立方体位置越远,速度越快(最大速度 ±2.0)。
6. 注意事项
- 确保
rospy和interactive_markers已安装(通过rosdep install安装依赖)。 - 如果使用 Python 3,需在
package.xml中声明exec_depend为python3-rospkg。
通过此代码,你可以直观地通过拖动立方体控制 turtlesim 中的海龟运动!
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from interactive_markers.interactive_marker_server import InteractiveMarkerServer
from visualization_msgs.msg import InteractiveMarker, InteractiveMarkerControl, InteractiveMarkerFeedback
from geometry_msgs.msg import Twist
from math import copysignclass TurtleController(Node):def __init__(self):super().__init__("turtle_interactive_controller")self.server = InteractiveMarkerServer(self, "turtle_control_marker")self.cmd_vel_pub = self.create_publisher(Twist, "/turtle1/cmd_vel", 10)self.last_x = 0.0self.last_rot = 0.0self._create_interactive_marker()def _create_interactive_marker(self):int_marker = InteractiveMarker()int_marker.header.frame_id = "world"int_marker.name = "turtle_control_marker"int_marker.description = "Control turtle1 movement"int_marker.scale = 0.5box_control = InteractiveMarkerControl()box_control.always_visible = Truebox_control.markers.append(self._make_box())int_marker.controls.append(box_control)move_control = InteractiveMarkerControl()move_control.name = "move_forward_backward"move_control.orientation.w = 1.0move_control.orientation.x = 1.0move_control.interaction_mode = InteractiveMarkerControl.MOVE_AXISint_marker.controls.append(move_control)rot_control = InteractiveMarkerControl()rot_control.name = "rotate"rot_control.orientation.w = 1.0rot_control.orientation.z = 1.0rot_control.interaction_mode = InteractiveMarkerControl.ROTATE_AXISint_marker.controls.append(rot_control)self.server.insert(int_marker, feedback_callback=self._feedback_cb)self.server.applyChanges()def _make_box(self):from visualization_msgs.msg import Markermarker = Marker()marker.type = Marker.CUBEmarker.scale.x = 0.2marker.scale.y = 0.2marker.scale.z = 0.2marker.color.r = 0.0marker.color.g = 1.0marker.color.b = 0.0marker.color.a = 1.0return markerdef _feedback_cb(self, feedback):if feedback.event_type == InteractiveMarkerFeedback.POSE_UPDATE:current_x = feedback.pose.position.xcurrent_rot = feedback.pose.orientation.zif abs(current_x - self.last_x) > 0.01:self._update_linear_speed(current_x)self.last_x = current_xif abs(current_rot - self.last_rot) > 0.01:self._update_angular_speed(current_rot)self.last_rot = current_rotself.server.applyChanges()def _update_linear_speed(self, x_pos):twist = Twist()twist.linear.x = copysign(min(abs(x_pos) * 0.5, 1.0), x_pos)self.cmd_vel_pub.publish(twist)def _update_angular_speed(self, rot_z):twist = Twist()twist.angular.z = copysign(min(abs(rot_z) * 2.0, 2.0), rot_z)self.cmd_vel_pub.publish(twist)def main():rclpy.init()controller = TurtleController()try:rclpy.spin(controller)except KeyboardInterrupt:passfinally:controller.server.destroy()controller.destroy_node()rclpy.shutdown()if __name__ == "__main__":main()微控制器可行案例
非综合性实验成功率接近100%
案例1
仅保留"Slider one"和"Pad without center"这两个功能,删除其他UI,修改优化代码,给出全部修改后代码,无需任何注释和解释。
#include <DNSServer.h>
#include <ESPUI.h>const byte DNS_PORT = 53;
IPAddress apIP(192, 168, 4, 1);
DNSServer dnsServer;#if defined(ESP32)
#include <WiFi.h>
#else
#include <ESP8266WiFi.h>
#include <umm_malloc/umm_heap_select.h>
#ifndef CORE_MOCK
#ifndef MMU_IRAM_HEAP
#warning Try MMU option '2nd heap shared' in 'tools' IDE menu
#warning use decorators: { HeapSelectIram doAllocationsInIRAM; ESPUI.addControl(...) ... }
#warning then check http://<ip>/heap
#endif
#ifndef DEBUG_ESP_OOM
#error on ESP8266 and ESPUI, you must define OOM debug option when developping
#endif
#endif
#endifconst char* ssid = "ESPUI";
const char* password = "espui";
const char* hostname = "espui";void slider(Control* sender, int type)
{Serial.print("Slider: ID: ");Serial.print(sender->id);Serial.print(", Value: ");Serial.println(sender->value);
}void padExample(Control* sender, int value)
{switch (value){case P_LEFT_DOWN:Serial.print("left down");break;case P_LEFT_UP:Serial.print("left up");break;case P_RIGHT_DOWN:Serial.print("right down");break;case P_RIGHT_UP:Serial.print("right up");break;case P_FOR_DOWN:Serial.print("for down");break;case P_FOR_UP:Serial.print("for up");break;case P_BACK_DOWN:Serial.print("back down");break;case P_BACK_UP:Serial.print("back up");break;case P_CENTER_DOWN:Serial.print("center down");break;case P_CENTER_UP:Serial.print("center up");break;}Serial.print(" ");Serial.println(sender->id);
}void setup(void)
{ESPUI.setVerbosity(Verbosity::VerboseJSON);Serial.begin(115200);#if defined(ESP32)WiFi.setHostname(hostname);
#elseWiFi.hostname(hostname);
#endifWiFi.begin(ssid, password);Serial.print("\n\nTry to connect to existing network");{uint8_t timeout = 10;do{delay(500);Serial.print(".");timeout--;} while (timeout && WiFi.status() != WL_CONNECTED);if (WiFi.status() != WL_CONNECTED){Serial.print("\n\nCreating hotspot");WiFi.mode(WIFI_AP);delay(100);WiFi.softAPConfig(apIP, apIP, IPAddress(255, 255, 255, 0));
#if defined(ESP32)uint32_t chipid = 0;for (int i = 0; i < 17; i = i + 8){chipid |= ((ESP.getEfuseMac() >> (40 - i)) & 0xff) << i;}
#elseuint32_t chipid = ESP.getChipId();
#endifchar ap_ssid[25];snprintf(ap_ssid, 26, "ESPUI-%08X", chipid);WiFi.softAP(ap_ssid);timeout = 5;do{delay(500);Serial.print(".");timeout--;} while (timeout);}}dnsServer.start(DNS_PORT, "*", apIP);Serial.println("\n\nWiFi parameters:");Serial.print("Mode: ");Serial.println(WiFi.getMode() == WIFI_AP ? "Station" : "Client");Serial.print("IP address: ");Serial.println(WiFi.getMode() == WIFI_AP ? WiFi.softAPIP() : WiFi.localIP());#ifdef ESP8266{ HeapSelectIram doAllocationsInIRAM;
#endifESPUI.slider("Slider one", &slider, ControlColor::Alizarin, 30);ESPUI.pad("Pad without center", &padExample, ControlColor::Carrot);ESPUI.begin("ESPUI Control");#ifdef ESP8266}
#endif
}void loop(void)
{dnsServer.processNextRequest();
}案例2
只保留电机控制ledc,前后旋转代码,其余代码全部删除(#include <WiFi.h> #include <WiFiUdp.h> #include <ArduinoJson.h>)。给出全部修改后代码,无需任何注释和解释。
#include <Arduino.h>#define LEFT_AHEAD 18
#define LEFT_BACK 19
#define RIGHT_AHEAD 32
#define RIGHT_BACK 33#define LEDC_CHANNEL_0 0
#define LEDC_CHANNEL_1 1
#define LEDC_CHANNEL_2 2
#define LEDC_CHANNEL_3 3
#define LEDC_TIMER_8_BIT 8
#define LEDC_BASE_FREQ 5000void setup() {ledcSetup(LEDC_CHANNEL_0, LEDC_BASE_FREQ, LEDC_TIMER_8_BIT);ledcAttachPin(LEFT_AHEAD, LEDC_CHANNEL_0);ledcSetup(LEDC_CHANNEL_1, LEDC_BASE_FREQ, LEDC_TIMER_8_BIT);ledcAttachPin(LEFT_BACK, LEDC_CHANNEL_1);ledcSetup(LEDC_CHANNEL_2, LEDC_BASE_FREQ, LEDC_TIMER_8_BIT);ledcAttachPin(RIGHT_AHEAD, LEDC_CHANNEL_2);ledcSetup(LEDC_CHANNEL_3, LEDC_BASE_FREQ, LEDC_TIMER_8_BIT);ledcAttachPin(RIGHT_BACK, LEDC_CHANNEL_3);
}void loop() {// Example usage (replace with your own control logic)forward(50);delay(1000);Stop();delay(500);trun(30);delay(500);Stop();delay(500);
}void motorL(int speed, int direction) {if (direction > 0) {ledcWrite(LEDC_CHANNEL_0, 0);ledcWrite(LEDC_CHANNEL_1, speed);}else {ledcWrite(LEDC_CHANNEL_0, speed);ledcWrite(LEDC_CHANNEL_1, 0);}
}void motorR(int speed, int direction) {if (direction > 0) {ledcWrite(LEDC_CHANNEL_2, speed);ledcWrite(LEDC_CHANNEL_3, 0);}else {ledcWrite(LEDC_CHANNEL_2, 0);ledcWrite(LEDC_CHANNEL_3, speed);}
}void trun(int angle) {int speed = 118;if(angle > 0) {motorL(speed, 1);motorR(speed, -1);delay(5);}else {motorL(speed, -1);motorR(speed, 1);delay(5);}Stop();
}void forward(int distance) {if(distance > 100) {motorL(255, 1);motorR(255, 1);}else {int speed = map(distance, 25, 100, 150, 255);motorL(speed, 1);motorR(speed, 1);}
}void Stop() {ledcWrite(LEDC_CHANNEL_0, 0);ledcWrite(LEDC_CHANNEL_1, 0);ledcWrite(LEDC_CHANNEL_2, 0);ledcWrite(LEDC_CHANNEL_3, 0);
}知识型问答完美
四元数在三维旋转描述中逐渐取代欧拉角,主要因其解决了欧拉角的核心缺陷并具备显著优势,具体分析如下:
一、欧拉角的固有缺陷
-
万向节死锁(Gimbal Lock)
欧拉角通过绕三个轴的顺序旋转(如Z-Y-X)描述姿态,但当中间轴(如俯仰角)旋转至±90°时,首尾两轴的旋转平面重合,导致系统丢失一个自由度。例如,飞行器俯仰角为90°时,偏航和横滚动作将无法区分,无法独立控制旋转方向。这一现象在航空航天、机器人控制等领域可能引发严重后果。 -
旋转顺序敏感性
欧拉角的旋转结果高度依赖顺序。例如,ZYX顺序(先绕Z轴,再Y轴,最后X轴)与XYZ顺序会产生不同结果,需预先统一约定顺序,增加了使用复杂性。 -
插值与表达不唯一性
- 欧拉角难以实现平滑插值(如动画过渡),因旋转路径可能因万向节死锁中断。
- 同一旋转状态可能对应多组欧拉角(如θ=0时,ψ与φ可合并),导致数据存储与传输的歧义。
二、四元数的核心优势
-
无万向节死锁
四元数通过四个参数(w, x, y, z)描述旋转,其单位性质(w2+x2+y2+z2=1)保证了旋转的连续性,避免了欧拉角因轴重合导致的自由度丢失。例如,飞行器姿态控制中,四元数可稳定处理任意角度的俯仰、偏航和横滚组合。 -
高效运算与存储
- 存储空间:四元数仅需4个浮点数,而旋转矩阵需9个(3×3),矩阵法甚至需16个(4×4),显著节省内存。
- 计算效率:四元数乘法通过简单四则运算完成,无需复杂三角函数计算,适合实时系统(如游戏、VR)。例如,Unity引擎中,四元数旋转比矩阵法更快,且避免累积误差。
-
平滑插值能力
四元数支持球形线性插值(Slerp),可生成均匀的旋转过渡效果,而欧拉角插值易因万向节死锁出现跳跃。例如,3D动画中,四元数插值可确保角色旋转自然流畅。 -
避免旋转顺序问题
四元数直接编码旋转轴和角度,不受旋转顺序影响,结果唯一且稳定。例如,无论采用ZYX还是XYZ顺序,四元数均可准确复现旋转。
三、四元数与欧拉角的对比示例
| 特性 | 欧拉角 | 四元数 |
|---|---|---|
| 自由度丢失风险 | 高(万向节死锁) | 无 |
| 存储空间 | 3个浮点数 | 4个浮点数(更紧凑) |
| 计算效率 | 低(依赖三角函数) | 高(四则运算) |
| 插值效果 | 差(易跳跃) | 优(Slerp平滑过渡) |
| 旋转顺序敏感性 | 高 | 无 |
| 适用场景 | 简单旋转、人机交互 | 复杂旋转、实时系统、动画插值 |
四、结论
四元数通过数学上的优雅设计,彻底解决了欧拉角的万向节死锁、顺序敏感性和插值难题,同时具备更高的运算效率和存储优势。尽管其抽象性增加了理解难度,但在需要精确、稳定旋转描述的领域(如航空航天、计算机图形学、机器人控制),四元数已成为首选方案。例如,Unity引擎中,Transform.rotation直接使用四元数,而欧拉角仅作为辅助工具提供,充分体现了四元数的实践价值。
万向节死锁的发现时机及核心原因分析
万向节死锁(Gimbal Lock)是三维空间旋转控制中因欧拉角描述方式导致的自由度丢失现象,其发现与具体场景密切相关,但本质原因可归结为旋转轴的几何重合。以下是具体分析:
一、典型发现场景
- 机械系统跟踪失效
以望远镜跟踪飞行器为例:- 初始状态:飞行器位于正东方向(x=90°, y=10°),望远镜通过绕X轴(俯仰)和Y轴(偏航)调整角度。
- 临界点:当飞行器飞行至y=90°(正上方)时,望远镜的Y轴(偏航)与Z轴(滚转)在局部坐标系中重合。此时若飞行器急转弯朝南(水平旋转90°),望远镜需绕X轴旋转90°以重新对准目标。但由于X轴已平行于望远镜自身中轴线,旋转无法改变朝向,导致跟踪失败。
- 现象:系统失去一个自由度,无法独立控制所有旋转方向。
- 三维动画与游戏中的角色控制异常
- 在FPS游戏中,若角色先绕X轴旋转90°(仰头),再尝试绕Y轴(左右转头)和Z轴(倾斜身体)调整姿态,会发现Y轴和Z轴的旋转效果相同,角色只能左右倾斜而无法俯仰。
- 数学解释:此时欧拉角的旋转顺序(如YXZ)中,中间轴(X轴)旋转90°导致首尾轴(Y、Z)重合,自由度从3降为2。
- 航空航天与机器人控制中的姿态失控
- 卫星姿态调整时,若依赖欧拉角描述旋转,当中间轴(如俯仰轴)旋转90°时,滚转轴与偏航轴可能重合,导致无法独立控制滚转或偏航,引发任务失败。
二、万向节死锁的本质原因
- 欧拉角的旋转顺序依赖
欧拉角通过依次绕三个坐标轴(如X→Y→Z)旋转描述物体姿态,但旋转顺序固定且基于初始坐标系。例如:- 先绕X轴旋转α角,再绕Y轴旋转β角,最后绕Z轴旋转γ角。
- 问题:当中间轴(如Y轴)旋转90°时,首轴(X轴)与末轴(Z轴)在局部坐标系中可能重合,导致后续旋转效果叠加。
- 几何重合与自由度丢失
- 以YXZ顺序为例:
- 绕Y轴旋转90°后,X轴和Z轴在局部坐标系中垂直。
- 绕X轴旋转90°后,新的Z轴与初始X轴重合。
- 此时绕Z轴旋转等价于绕初始X轴旋转,系统失去绕新X轴旋转的能力。
- 数学表达:旋转矩阵或四元数中,当中间角为90°时,旋转矩阵的行列式为0,表示线性相关,自由度减少。
- 以YXZ顺序为例:
- 局部坐标系与全局坐标系的混淆
欧拉角旋转基于初始坐标系,而非动态更新的局部坐标系。例如:- 绕X轴旋转后,Y轴和Z轴应随之更新,但欧拉角计算仍基于初始坐标系,导致后续旋转轴方向与预期不符。
三、避免万向节死锁的方法
- 调整旋转顺序
根据应用场景选择合适的旋转顺序(如XYZ、ZYX等),减少重合概率。例如:- 描述船体姿态时,将中间轴定义为船的左右方向(难以旋转90°),降低死锁风险。
- 使用四元数或旋转矩阵
- 四元数:通过四个分量(w, x, y, z)描述旋转,避免欧拉角的奇异性问题,且计算效率更高。
- 旋转矩阵:用3×3矩阵表示旋转,无自由度丢失,但存储和计算成本较高。
- 限制旋转角度范围
避免中间轴旋转接近90°,或通过逻辑判断强制约束角度,防止重合发生。
总结
万向节死锁的发现通常与特定旋转场景相关,如机械跟踪、游戏角色控制或航空航天姿态调整。其本质是欧拉角描述旋转时,中间轴旋转90°导致首尾轴几何重合,系统自由度从3降为2。通过调整旋转顺序、使用四元数或限制角度范围,可有效避免这一问题。
摘要:本文探讨了ROS机器人操作系统和微控制器开发中的可行与不可行案例。不可行案例展示了使用非专业对话大模型工具进行复杂项目开发时的问题,强调目标单一的项目更容易成功。可行案例包括ROS交互式标记控制和Turtlesim运动控制,以及微控制器精简功能实现,这些案例成功率接近100%。技术分析部分详细比较了四元数与欧拉角的优劣,指出四元数在解决万向节死锁、运算效率和插值平滑性方面的优势,并分析了万向节死锁的发现场景和本质原因。