计算机视觉 - 物体检测(二)单阶段:YOLO系列 + SSD
目标检测是计算机视觉的基石。与上一讲复杂的两阶段范式(如R-CNN)不同,单阶段方法开启了“一眼检测”的新思路。它摒弃了独立的区域提议步骤,将任务简化为单次网络前向传播,在速度上取得压倒性优势。
我们将从开创者YOLOv1 出发,剖析其统一的回归思想与设计局限;随后探索SSD如何通过多尺度与默认框机制实现精度飞跃;最后追踪YOLOv2/v3的自我进化之路,看它们如何吸收业界精华,通过骨干网络升级、多尺度预测等技术,最终成为实时检测领域的标杆。
目录
上一讲 两阶段(R-CNN)与这一讲 单阶段区别
YOLO-v1
1. 架构
2. 损失函数设计:
3. 局限性
SSD
三大关键设计
技巧设计
YOLO-v2
上一讲 两阶段(R-CNN)与这一讲 单阶段区别
-
两阶段(R-CNN, Fast R-CNN, Faster R-CNN): 将“目标检测”这个任务明确地拆分成两个子任务,并分步执行。
-
阶段一:区域提议(Region Proposal) - 找出图片中“可能”包含物体的所有区域框(例如,1,000~2,000个)。
-
方法: 使用单独的算法(如Selective Search或RPN网络)来生成这些候选框。
-
-
阶段二:分类与精修 - 对每一个候选区域框进行精细处理。
-
步骤: 将每个候选框输入到一个卷积神经网络中进行特征提取,然后使用分类器判断框内物体的类别,同时使用回归器对框的位置和大小进行微调。
-
打个比方: 两阶段方法就像先用人眼快速扫描一张图片,找出所有“可能是物体”的模糊区域(阶段一),然后再把每个模糊区域拿起来,凑近了仔细看,确认它到底是什么,并且把它的边界划精确(阶段二)。这个过程是顺序的,比较慢但通常更精确。
-
-
单阶段(YOLO, SSD, RetinaNet): 将“目标检测”视为一个单一的回归问题。
-
核心思想: 只看图片一次,直接在网络的一次前向传播过程中,同时预测出所有目标的位置和类别。
-
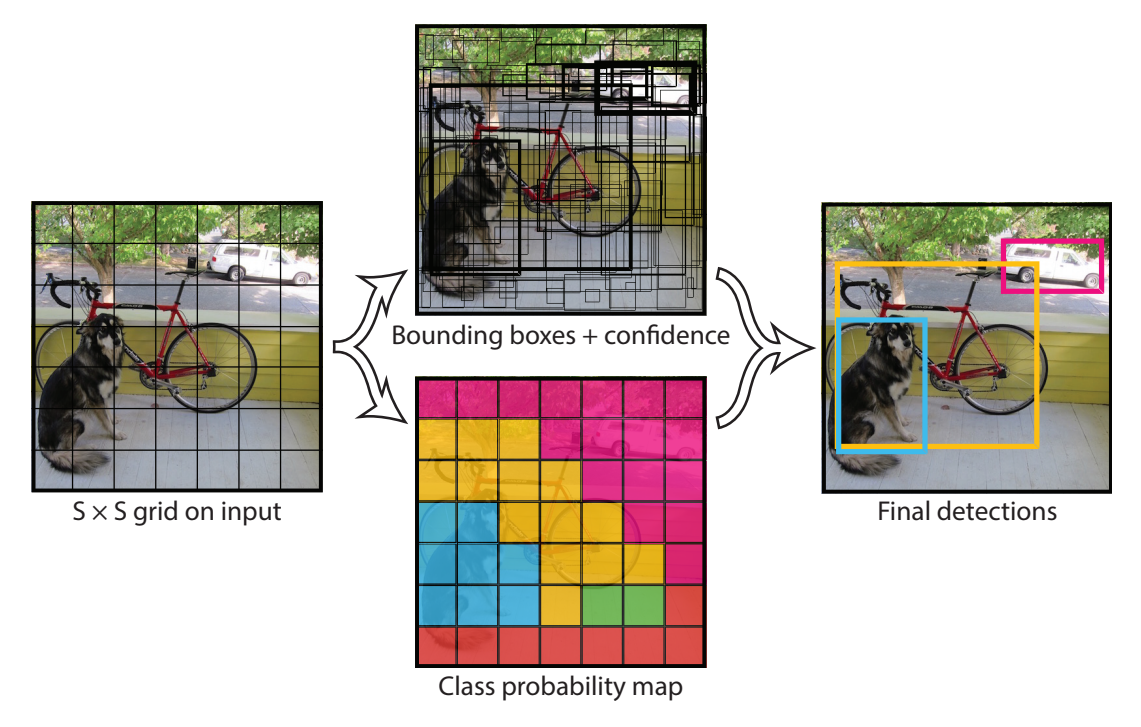
方法: 将输入图像均匀地划分成一个 S x S 的网格(Grid Cell)。每个网格负责预测固定数量的边界框(Bounding Box)以及这些框的“物体置信度”和“类别概率”。
打个比方: 单阶段方法就像你一眼看过去整张图片,大脑瞬间就完成了所有物体的定位和识别。你不需要先找“可能是物体的区域”,而是直接输出了“哪里有什么”。这个过程是并行的,速度快。
-
YOLO-v1
You Only Look Once
1. 架构
-
划分网格(Grid Division):
-
将输入图像 resize 到一个固定尺寸(如 448x448),并将其划分为一个 S x S 的网格(例如 7x7)。
-
-
每个网格负责预测边界框:
-
每个网格会预测 B 个边界框(例如 B=2)。对于每个边界框,网络需要预测5个值:
-
(x, y, w, h):边界框的中心点坐标(相对于该网格的偏移)以及框的宽和高(相对于整个图片的比例)。 -
confidence(置信度):表示这个框内“包含一个物体”的把握有多大。计算公式为:Pr(Object) * IOU^(truth_pred)。如果网格里没有物体,置信度应该为0;如果有,置信度等于预测框与真实框的IOU(交并比)。
-
-
-
每个网格同时预测类别概率:
-
此外,每个网格(而不是每个边界框)还会预测一组 C 个“条件类别概率”(Conditional Class Probabilities),即
Pr(Class_i | Object)。意思是“如果这个网格里有物体,那么这个物体是第 i 类的概率是多少”。
-
-
整合输出(Final Output):
-
将上述信息组合起来,网络的最终输出张量形状就是 S x S x (B * 5 + C)
-
在推理时,将每个边界框的“置信度”与每个类别的“条件概率”相乘,就得到了每个框对于每个类别的“类别置信度分数”(Class-specific Confidence Score) Pr(Class_i | Object) * Pr(Object) * IOU = Pr(Class_i) * IOU 这个分数同时编码了 “框内物体属于某类的概率” 和 “预测框的位置准不准” 两方面信息。
-
-
inference 推理输出时 非极大值抑制(Non-Maximum Suppression, NMS):
-
经过上述步骤,会得到 S x S x B 个预测框。很多框是重复的或者置信度很低的。
-
一些大型物体或跨越多个网格单元边界的物体,可能会被多个网格单元较好地定位。
-
NMS 用于过滤这些冗余的框,只保留最好的一个。它根据类别置信度分数,抑制掉那些与最高分框重叠度(IOU)过高的其他框。
-
2. 损失函数设计:
-
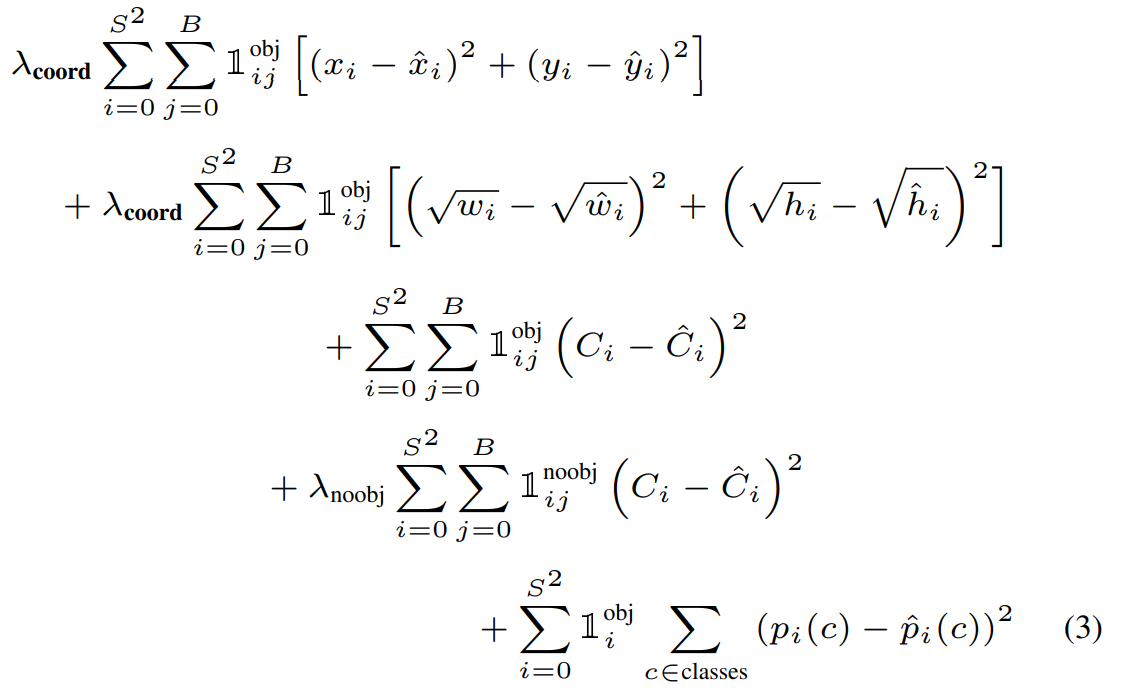
损失函数 = 坐标损失(中心点+宽高) + 置信度(有没有物体)损失 + 分类损失
-
挑战1:分类错误比定位错误更严重
-
挑战2:图像中“背景”远多于“物体”,大量背景网格产生的“置信度误差”会占据总损失的绝大部分。模型为了快速降低总损失,会倾向于把所有网格的置信度都预测成0(“躺平”)
-
挑战3:大框大物体的10个像素差异和小物体的10个像素
| 部分 | 目标 | 关键设计 | 解决的问题 |
|---|---|---|---|
| 1. 中心点损失 | 精准定位物体中心 | 𝕀_{ij}^{obj} 和 λ_coord=5 | 只优化主预测框,加强定位重要性 |
| 2. 宽高损失 | 精准框出物体大小 | 预测宽高平方根 | 均衡大小框的误差敏感性,改善 小物体检测 |
| 3. 有物体置信度 | 提高真阳性框的置信度 | 𝕀_{ij}^{obj} | 让模型对正确预测的框更有把握 |
| 4. 无物体置信度 | 降低假阳性(背景误判) | 𝕀_{ij}^{noobj} 和 λ_noobj=0.5 | 解决背景淹没问题,这是稳定训练的关键 |
| 5. 类别损失 | 正确识别物体类别 | 𝕀_{i}^{obj} | 只在有物体的网格上进行分类学习 |
3. 局限性
-
空间约束强,对成群小物体检测差:
-
根源: 每个
S x S的网格最多只能预测B个物体(B=2)。这意味着,如果两个同类小物体的中心点落入同一个网格单元,YOLOv1只能检测出其中一个。对于密集的小物体(如鸟群、人群),这是致命的。
-
-
泛化能力到新形状物体较弱:
-
根源: 模型的边界框预测能力是从训练数据中学来的。如果测试数据中出现了一种训练集中从未见过的、非常奇特的长宽比或物体姿态,模型会难以预测出准确的框。因为它的“想象力”受限于训练数据。
-
-
特征相对粗糙,定位精度是主要误差来源:
-
根源: 网络为了获得大的感受野和更高级的语义特征,进行了多次下采样(如从448x448下采样到7x7)。这导致用于预测边界框的特征图分辨率很低(7x7),包含的细粒度几何信息不足。因此, bounding box 的坐标回归不够精准。
-
后续版本的改进: 这也是为什么YOLOv2/v3开始使用多尺度特征图(例如,不仅在深层粗特征图上预测,也在浅层细特征图上预测)和锚点框 来提升定位精度,尤其是小物体检测能力。
-
-
损失函数对大小框误差处理仍不完美:
-
回顾: 虽然损失函数通过预测宽高的平方根来部分缓解了大小框误差权重不均的问题。
-
遗留问题: 但平方根变换只是一个近似解决方案,并未根本解决IOU损失与坐标直接回归之间的不对齐问题。定位误差(尤其是小物体的定位误差)是YOLOv1最主要的错误类型。这催生了后续研究中各种基于IOU的损失函数(如GIOU, DIOU, CIOU)。
-
SSD
SSD: Single Shot MultiBox Detector
SSD的核心贡献在于将“多尺度特征图预测”和“默认框(锚点)”机制成功结合,在一个统一的单阶段框架内,同时实现了高速度、高精度(尤其是对小物体)和对物体形状的良好适应性。
在不同尺度(实现不同大小)的特征图上,为每个位置生成多个默认框(实现不同形状)
然后预测偏移量和类别分数,最后通过匹配和损失计算进行训练。
三大关键设计
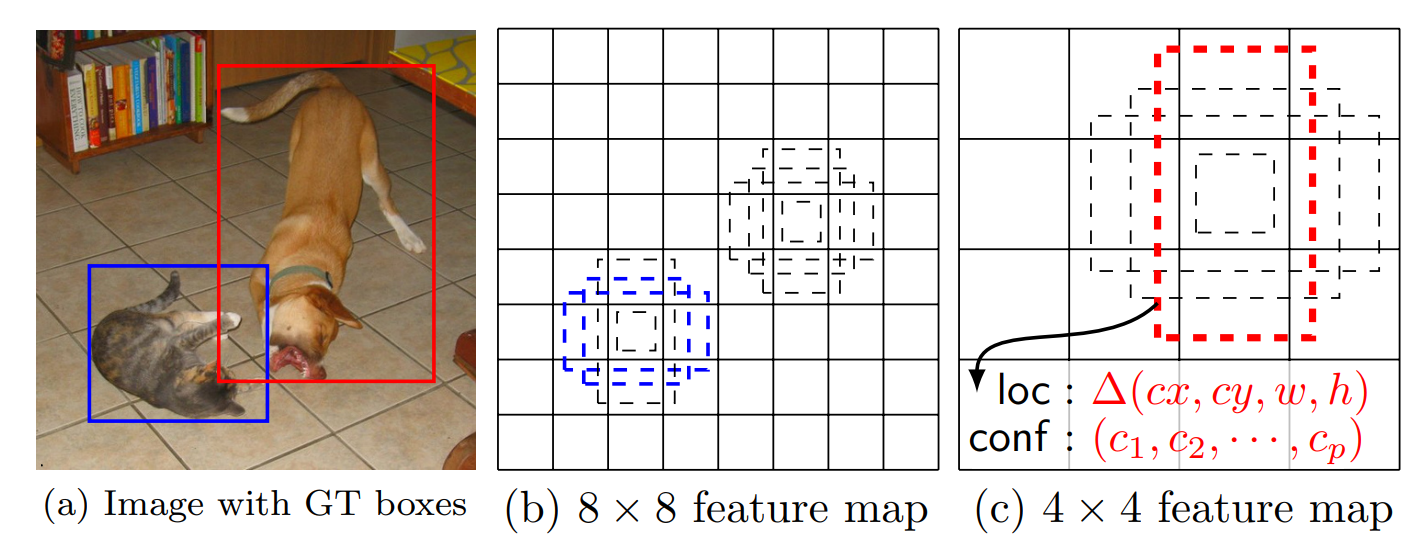
1. 多尺度特征图检测
-
YOLOv1的局限: 只在最后一层(7x7的粗粒度特征图)进行预测。这导致小物体检测能力很差,因为经过多次下采样后,小物体的信息几乎丢失了。
-
SSD的创新: 使用多个不同尺度的特征图进行预测(例如,38x38, 19x19, 10x10, 5x5, 3x3, 1x1)。
-
浅层特征图(如38x38): 分辨率高,感受野小,包含丰富的细节信息,非常适合检测小物体。
-
深层特征图(如1x1): 分辨率低,感受野大,包含高级的语义信息,非常适合检测大物体。
-
结果: SSD能自然地处理各种尺寸的物体,大大改善了小物体检测性能。
-
2. 默认框(Default Boxes)—— 预定义的锚点
-
YOLOv1的局限: 每个网格单元预测两个边界框,但它们的形状是模型自由学习的,在训练初期很不稳定,且难以适应各种形状的物体。
-
SSD的创新: 在每个特征图的每个位置,预先定义一组不同大小和宽高比的“默认框”。可以理解为预先铺好各种形状的“锚点”。
-
网络的任务不再是直接回归框的绝对坐标,而是预测每个默认框的偏移量和类别置信度。
-
好处:
-
训练更稳定:学习目标是偏移量,而不是凭空创造坐标,任务更简单。
-
应对多种形状:通过设置不同宽高比的默认框(如1:1, 1:2, 2:1),模型更容易匹配各种形状的物体(如瘦高的人、扁平的汽车)。
-
-
3. 卷积预测
-
YOLOv1的局限: 使用全连接层进行预测,这会破坏特征图的空间结构,并且参数量大。
-
SSD的创新: 使用小卷积核(如3x3)在特征图上进行滑动窗口式的预测。
-
对于每个特征图上的每个点,应用卷积核直接输出(类别数+4个坐标偏移)* 该点的默认框数量。
-
好处:
-
保持了空间信息:更适合检测任务。
-
更高效:参数更少,速度更快。
-
可以灵活应用于任何尺寸的特征图:这是实现多尺度预测的基础。
-
-
技巧设计
1. 匹配策略:确定哪些默认框需要负责学习预测哪个真实物体。
-
SSD的创新(两步匹配):
-
最佳匹配: 为每个真实物体找到与其IOU最大的默认框。确保每个物体都至少有一个“负责人”。
-
阈值匹配: 再将所有与任意真实物体IOU超过0.5的默认框都设为正样本。
-
-
为什么这样设计?
-
简化学习: 一个物体可能被多个形状相近的默认框较好地覆盖。让网络为所有这些“还不错”的框都学习预测该物体,比强迫它必须只挑出最好的那一个要更容易。这增加了正样本数量,缓解了正负样本不平衡。
-
2. 难例挖掘:解决正负样本极端不平衡的关键
-
问题: 一张图可能只有几个物体,但会产生数千个默认框,其中绝大部分都是容易分类的背景(负样本)。如果全部用于训练,简单背景的梯度会“淹没”物体和难分背景的梯度。
-
SSD的解决方案: 不是全部使用,而是主动挑选那些“最难”的负样本(即模型最容易搞错、信心满满地认为是物体的背景块)。
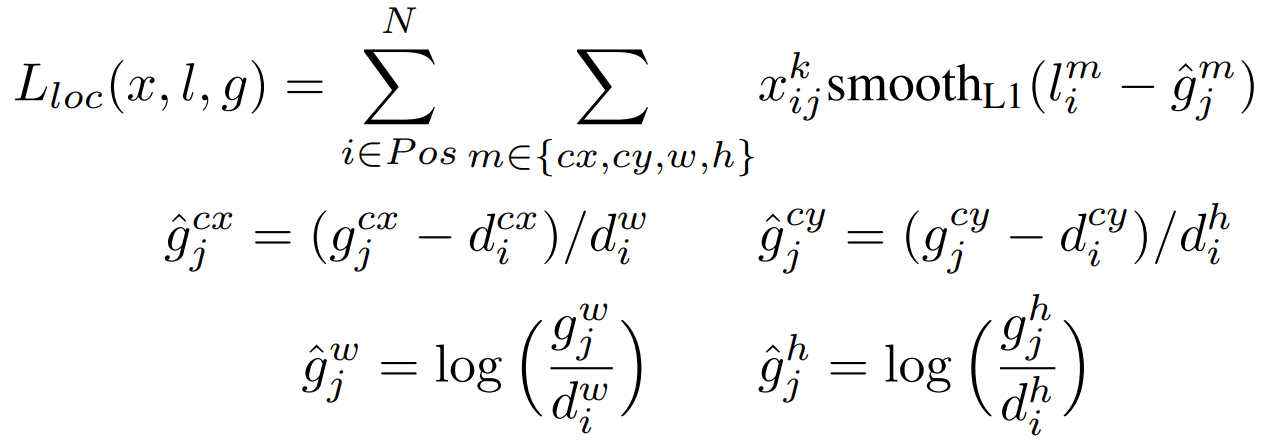
3. 损失函数:Smooth L1 + Softmax
![]()
-
L_conf(x, c): 置信度损失,负责学习“框里有什么?”或者“框里是不是背景?” -
softmax 正样本和类别p ;背景和类别0

-
L_loc(x, l, g): 定位损失,偏移量ĝ负责学习“框的位置和大小准不准?”
YOLO-v2
https://arxiv.org/pdf/1612.08242
-
通过 BN、锚点框、维度聚类、直接位置预测 提升了定位精度和召回率。
-
通过 Darknet-19 和全卷积设计 保证了速度。
-
通过 多尺度训练 增强了模型鲁棒性和灵活性。
-
通过 细粒度特征 改善了小物体检测。
-
通过 联合训练 实现了类别数量的巨大突破。
| 改进点 | 描述 | 解决的问题 |
|---|---|---|
| 批归一化 | 在所有卷积层后添加批量归一化(Batch Normalization)。 | 稳定训练,加速收敛,减少对其他正则化方法(如Dropout)的依赖,提升mAP约2%。 |
| 高分辨率分类器 | 先在ImageNet上以448x448的高分辨率(而不仅是224x224)微调分类模型,然后再用于检测。 | 让网络在转向检测任务前就适应更高的分辨率,使其能够更好地处理高分辨率细节。 |
| 卷积化与锚点框 | 移除YOLOv1中的全连接层,改用全卷积网络。引入锚点框(类似Faster R-CNN和SSD的默认框)。 | 全卷积化使模型能适应不同尺寸的输入。锚点框将预测目标从“直接回归坐标”变为“回归相对于锚点框的偏移量”,使网络更容易学习,显著提升召回率(Recall)。 |
| 维度聚类 | 对训练集边界框的宽高进行k-means聚类,自动选出最具有代表性的锚点框尺寸,而不是手动选择。 | 使得初始的锚点框尺寸更符合数据集的物体形状,为回归提供一个更好的起点,加速模型收敛。 |
| 直接位置预测 | 对基于锚点框的偏移量预测施加约束,使用sigmoid函数将预测的中心点坐标限制在其所属的网格单元内。 | 防止模型在训练初期预测不稳定的边界框位置,使训练更稳定。 |
| 细粒度特征 | 引入直通层,将浅层高分辨率特征图(26x26)连接到深层特征图,类似于残差连接或特征金字塔。 | 将浅层的细粒度特征与深层的高级语义特征结合,极大改善了小物体检测能力。 |
| 多尺度训练 | 在训练过程中,每经过一定批次(如10个batch),就随机选择一个新的输入图像尺寸(如{320, 352, ..., 608})进行训练。 | 迫使网络学会在不同输入尺度下都能良好预测,从而增强了模型的鲁棒性。同一个模型可以灵活地在速度和精度之间切换(小尺寸快,大尺寸准)。 |