网站运营代理淘宝网站建设违规吗
一、引言
在高精度三维轮廓测量领域,激光频率梳与蓝光机械 3D 扫描技术的融合,为复杂形貌物体的测量提供了新方案。该技术结合激光频率梳的时频基准优势与蓝光机械扫描的结构光特性,在航空航天、文物保护等领域展现出独特应用潜力。明确其工作原理及性能边界,对技术优化与工程推广具有重要意义。
二、工作原理
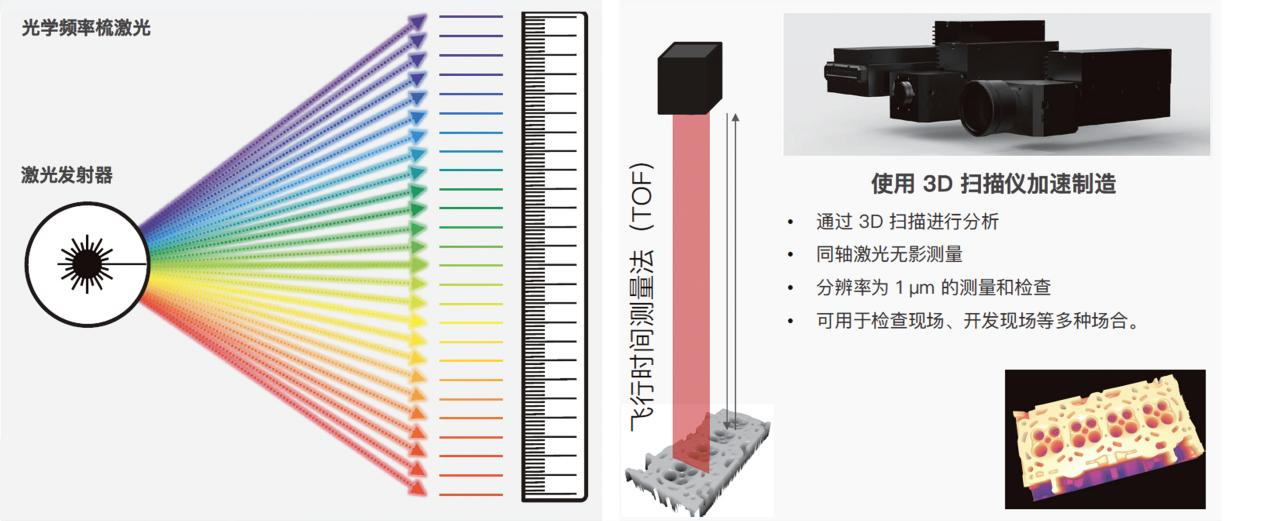
(一)激光频率梳的时频基准构建
激光频率梳通过飞秒激光器产生超短脉冲序列,形成等频率间隔的梳齿状光谱(间隔精度达 10⁻¹⁵量级)。当脉冲光投射到被测物体表面时,反射光与参考光在光电探测器产生干涉,其相位差与光程差呈线性关系。利用频率梳的重复频率(f_rep)和载波包络偏移频率(f_ceo)双锁定机制,将时间延迟测量转化为频率精确计算,为三维坐标解算提供纳米级时频基准。
(二)蓝光机械 3D 扫描的结构光调制
采用 450nm 蓝光作为结构光源,通过数字微镜器件(DMD)投射正弦条纹图案到被测物体。受物体表面高度调制,条纹发生形变,其相位偏移量 Δφ 与高度 h 满足 h = (λ・Δφ)/(4π・sinθ)(λ 为蓝光波长,θ 为投影角度)。机械扫描系统驱动蓝光投射头作二维运动,配合激光频率梳的时频标记,实现动态场景下的相位同步采集,解决传统结构光扫描的运动畸变问题。
(三)融合测量的坐标解算流程
激光频率梳为每个测量点提供绝对时频标签,蓝光结构光获取相位编码的相对高度信息。通过时频标签匹配条纹相位数据,建立全局统一的三维坐标系统:首先利用频率梳的飞秒脉冲对蓝光条纹进行时间戳标记,再通过相位解包裹算法(如最小二乘法)获取绝对高度,最后结合机械臂运动学参数(关节角度、连杆长度),经坐标变换重建物体三维轮廓。
三、技术优点
(一)超高测量精度与绝对坐标溯源
激光频率梳的时频基准使光程测量不确定度达 ±0.15μm,结合蓝光结构光的亚像素相位解算(精度达 1/2048 周期),可实现 ±0.3μm 的单点高度精度。在航空发动机单晶叶片测量中,该技术成功分辨出 0.5μm 的铸造缺陷,较传统白光结构光(精度 ±5μm)提升 10 倍。同时,频率梳的绝对时频标记避免了传统扫描的累积误差,实现全场景坐标绝对溯源。
(二)动态适应性与复杂形貌测量能力
机械扫描机构配合频率梳的高速时频标记(响应速度达 10⁶点 / 秒),可适应 50mm/s 以下的扫描速度,在汽车覆盖件动态检测中(工件移动速度 30mm/s),测量误差 < 0.8μm。对于深孔、深槽等传统光学测量盲区,通过机械臂的多角度扫描(可达 ±90° 俯仰),结合频率梳的长相干长度(可调至 100mm),可实现盲孔底部的轮廓重建,如 φ5mm 深孔(深度 20mm)的测量盲区占比 < 1%。
(三)环境鲁棒性与多材质适应性
蓝光波长(450nm)在金属、陶瓷等反光表面的反射率比红光(650nm)高 30%,配合频率梳的短脉冲抗干扰特性(相干长度 <100μm),在车间强光环境(照度 10000lux)下仍能保持 70% 以上的条纹对比度。实验显示,在铝合金(Ra=3.2μm)、黑色塑料(反射率 < 5%)等多材质混合工件测量中,高度测量标准差 < 0.5μm,显著优于单一激光三角法(标准差> 2μm)。
四、技术缺点
(一)系统集成复杂度与成本压力
激光频率梳需飞秒激光器(成本 > 50 万元)、双频锁定系统(精度 ±1Hz),蓝光机械扫描部分包含六轴机械臂(重复定位精度 ±0.02mm)、DMD 投影系统(分辨率 2048×1080),整套系统成本达 300-500 万元,是传统工业 3D 扫描仪(约 50 万元)的 6-10 倍。且各子系统时空同步校准(如飞秒脉冲与机械臂运动的时间戳误差需 < 10ns)需专用同步控制器,增加了工程实施难度。
(二)扫描速度与数据处理瓶颈
受机械臂运动速度(最大 100mm/s)和频率梳数据采集率(100MHz)限制,完成 1m×1m 工件扫描需时 15-20 分钟,难以满足汽车焊接在线检测(节拍 <2 分钟)需求。同时,单幅扫描数据量达 1GB(点云密度 100 点 /mm²),三维重建时需 GPU 集群进行相位解算(单模型处理时间> 30 分钟),数据处理效率制约了批量检测应用。
(三)测量盲区与特殊场景限制
机械扫描头的物理尺寸(最小直径 50mm)导致对狭小空间(如 φ10mm 以下孔)无法测量,且扫描角度受机械臂运动学限制(仰角 > 70° 时测量误差增大)。在高反光镜面(反射率 > 95%)或强吸光材料(如碳纤维)表面,蓝光结构光易出现相位失真(误差 > 10%),需额外喷涂显影剂,影响测量效率与工件表面质量。
激光频率梳3D光学轮廓测量系统简介:
20世纪80年代,飞秒锁模激光器取得重要进展。2000年左右,美国J.Hall教授团队凭借自参考f-2f技术,成功实现载波包络相位稳定的钛宝石锁模激光器,标志着飞秒光学频率梳正式诞生。2005年,Theodor.W.Hänsch(德国马克斯普朗克量子光学研究所)与John.L.Hall(美国国家标准和技术研究所)因在该领域的卓越贡献,共同荣获诺贝尔物理学奖。
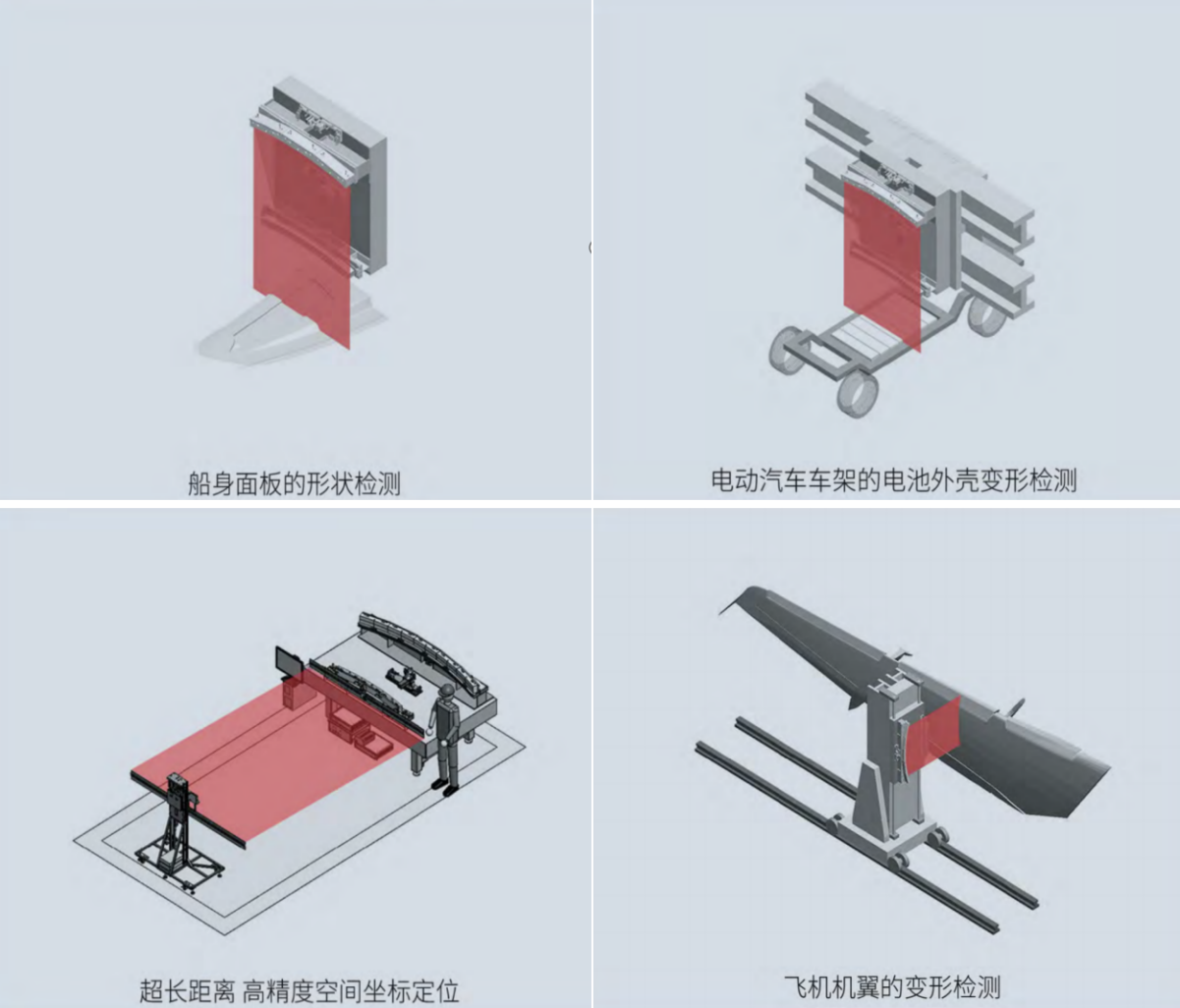
系统基于激光频率梳原理,采用500kHz高频激光脉冲飞行测距技术,打破传统光学遮挡限制,专为深孔、凹槽等复杂大型结构件测量而生。在1m超长工作距离下,仍能保持微米级精度,革新自动化检测技术。
核心技术优势
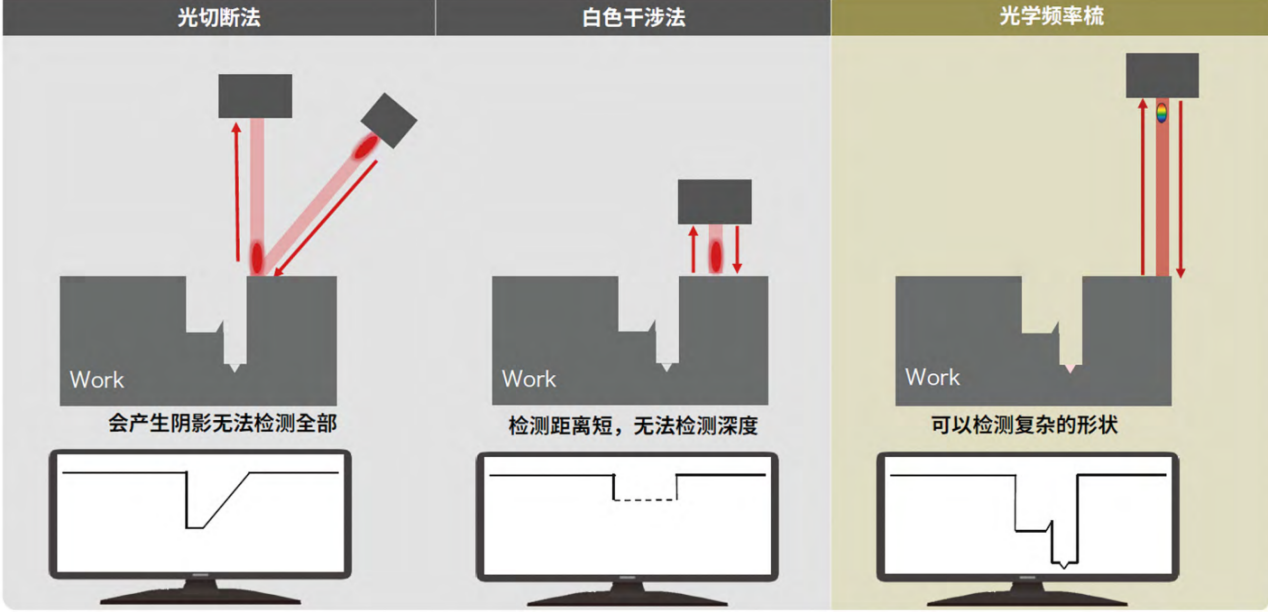
①同轴落射测距:独特扫描方式攻克光学“遮挡”难题,适用于纵横沟壑的阀体油路板等复杂结构;
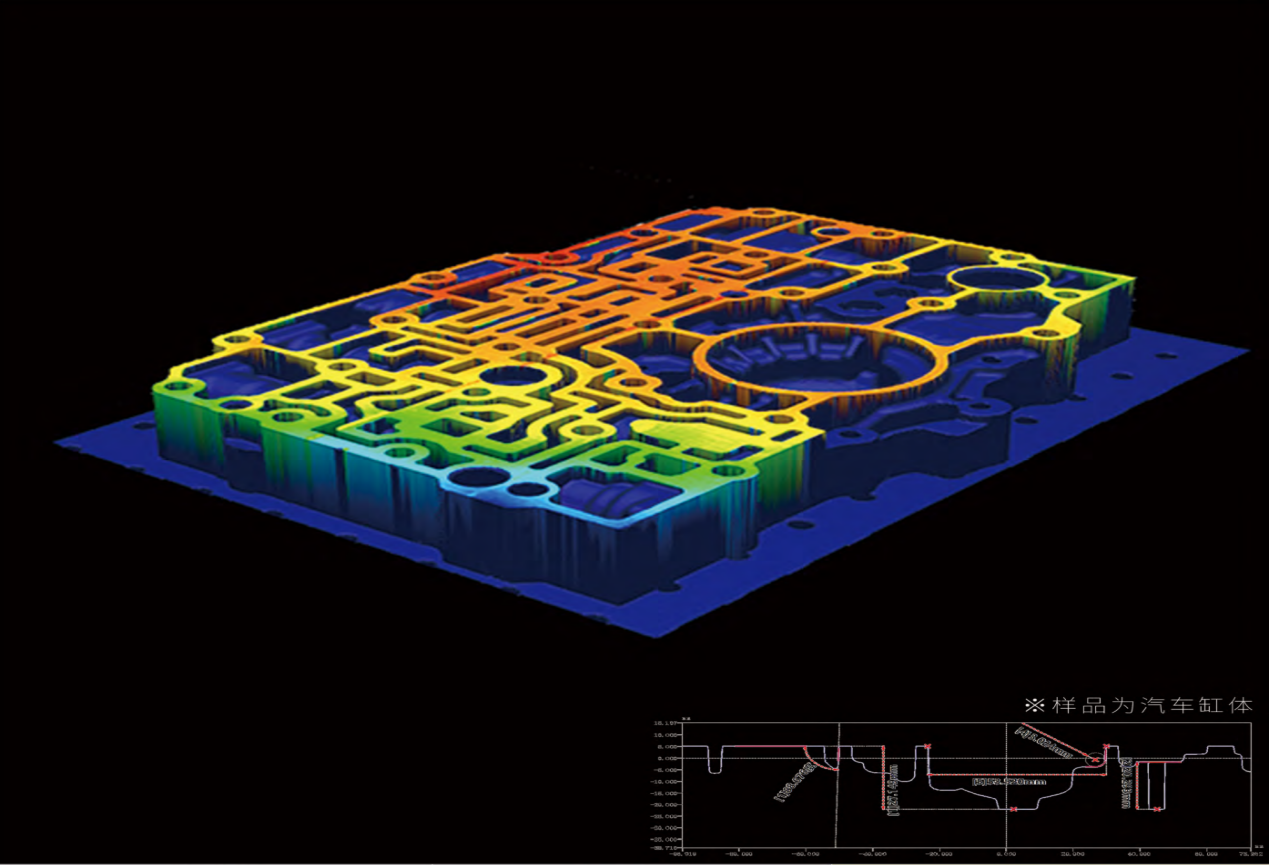
(以上为新启航实测样品数据结果)
②高精度大纵深:以±2μm精度实现最大130mm高度/深度扫描成像;
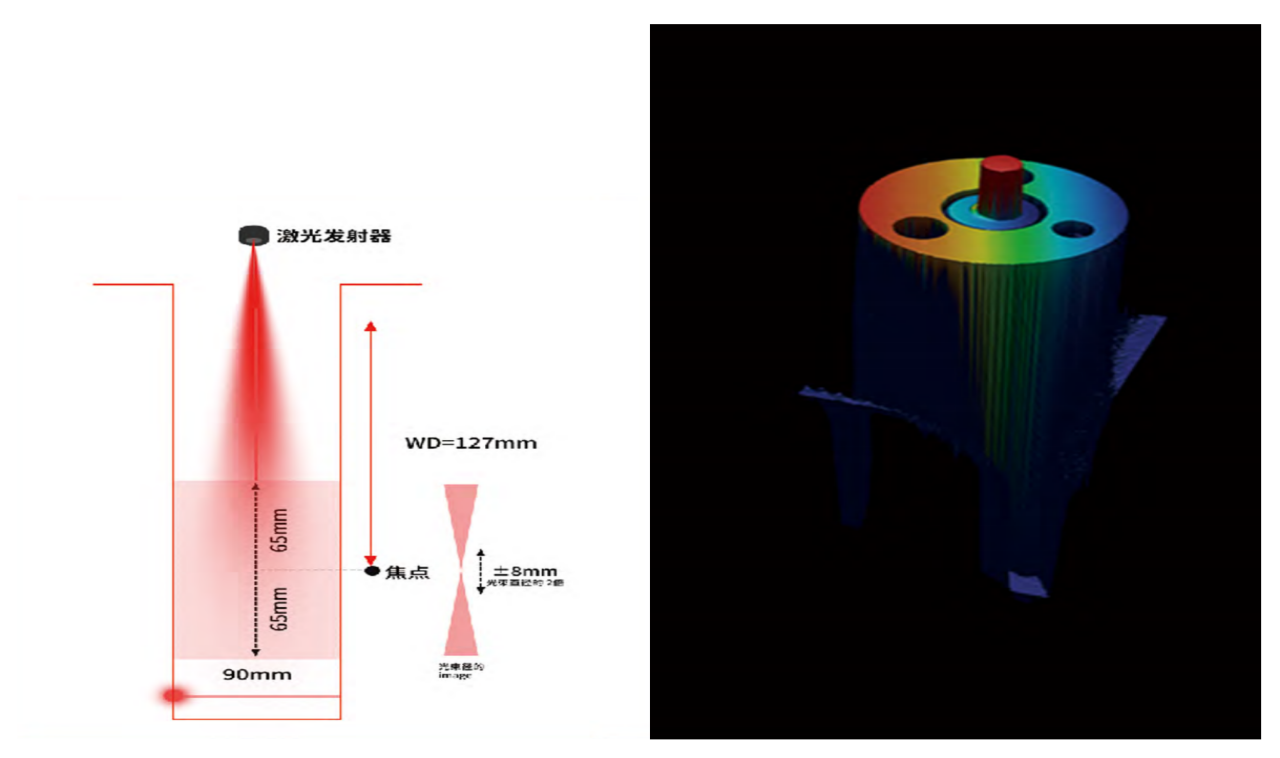
(以上为新启航实测样品数据结果)
③多镜头大视野:支持组合配置,轻松覆盖数十米范围的检测需求。
(以上为新启航实测样品数据结果)