飞马无人机正射/倾斜影像数据预处理
0 描述
飞马无人机搭载正射/倾斜镜头获取影像后,还需要进行POS解算,对影像进行POS匹配和旋转等处理。
1 POS解算、
1.1 GNSS格式转换
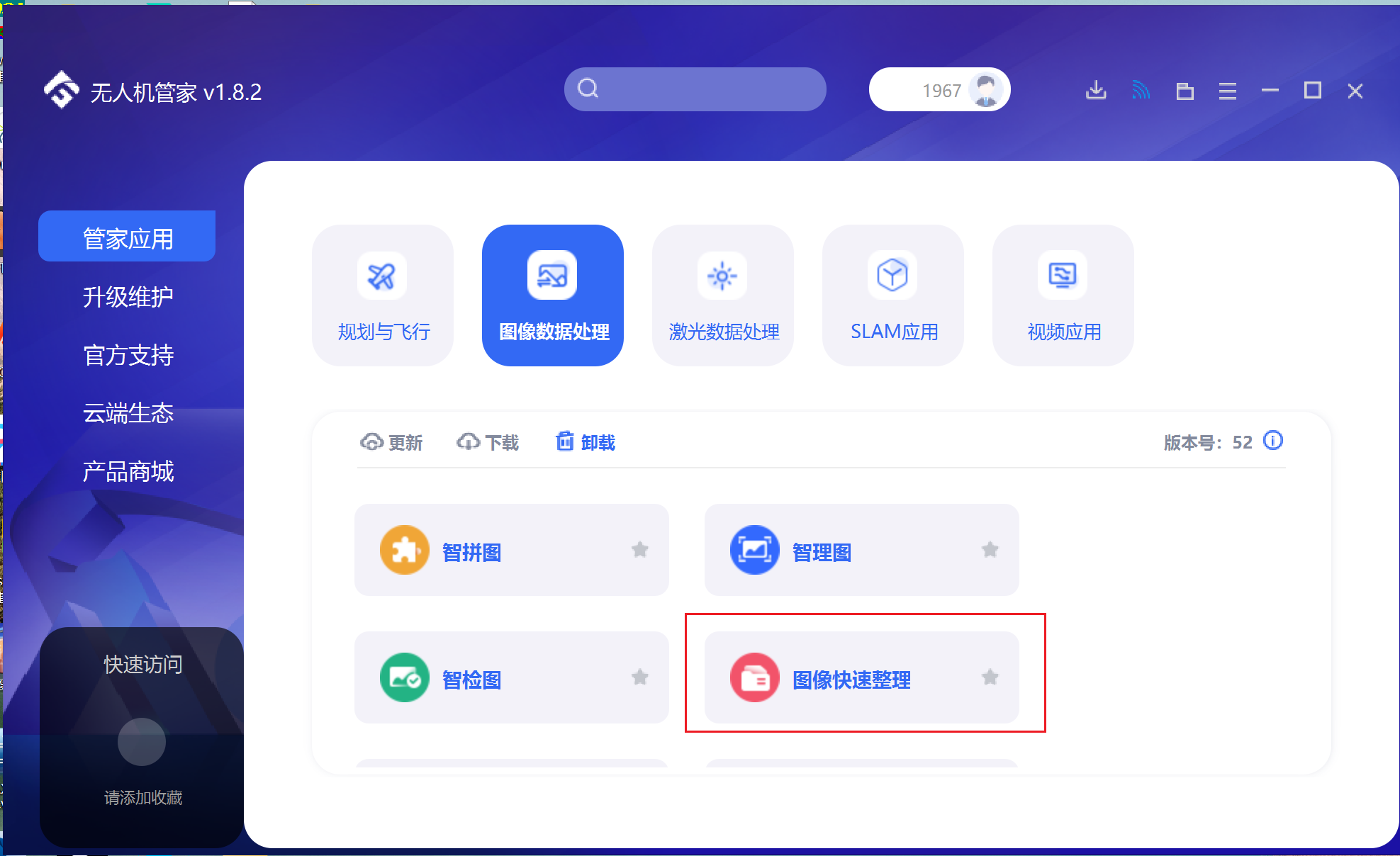
进入无人机管家,打开智理图

点击GNSS处理—>GNSS格式转换
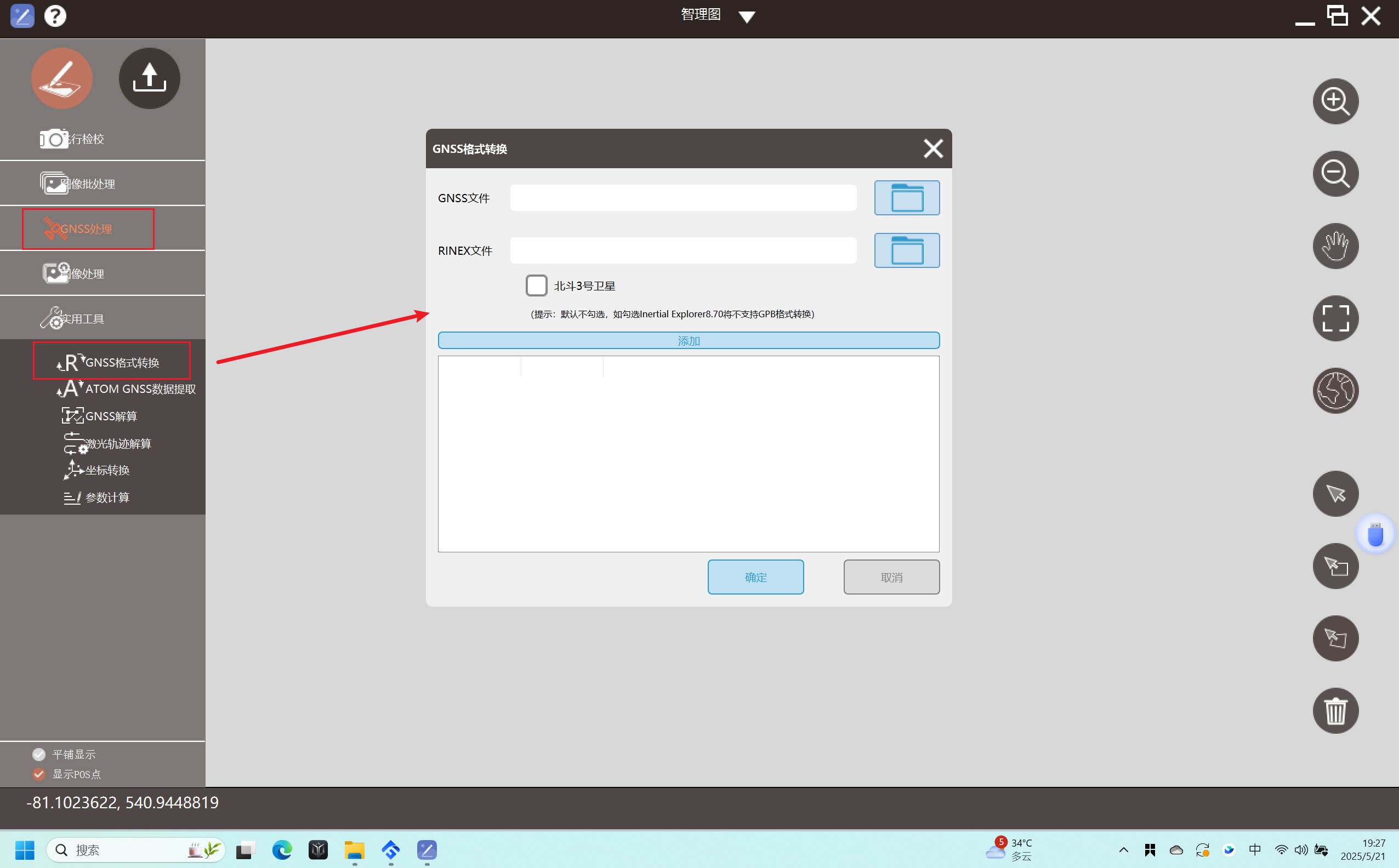
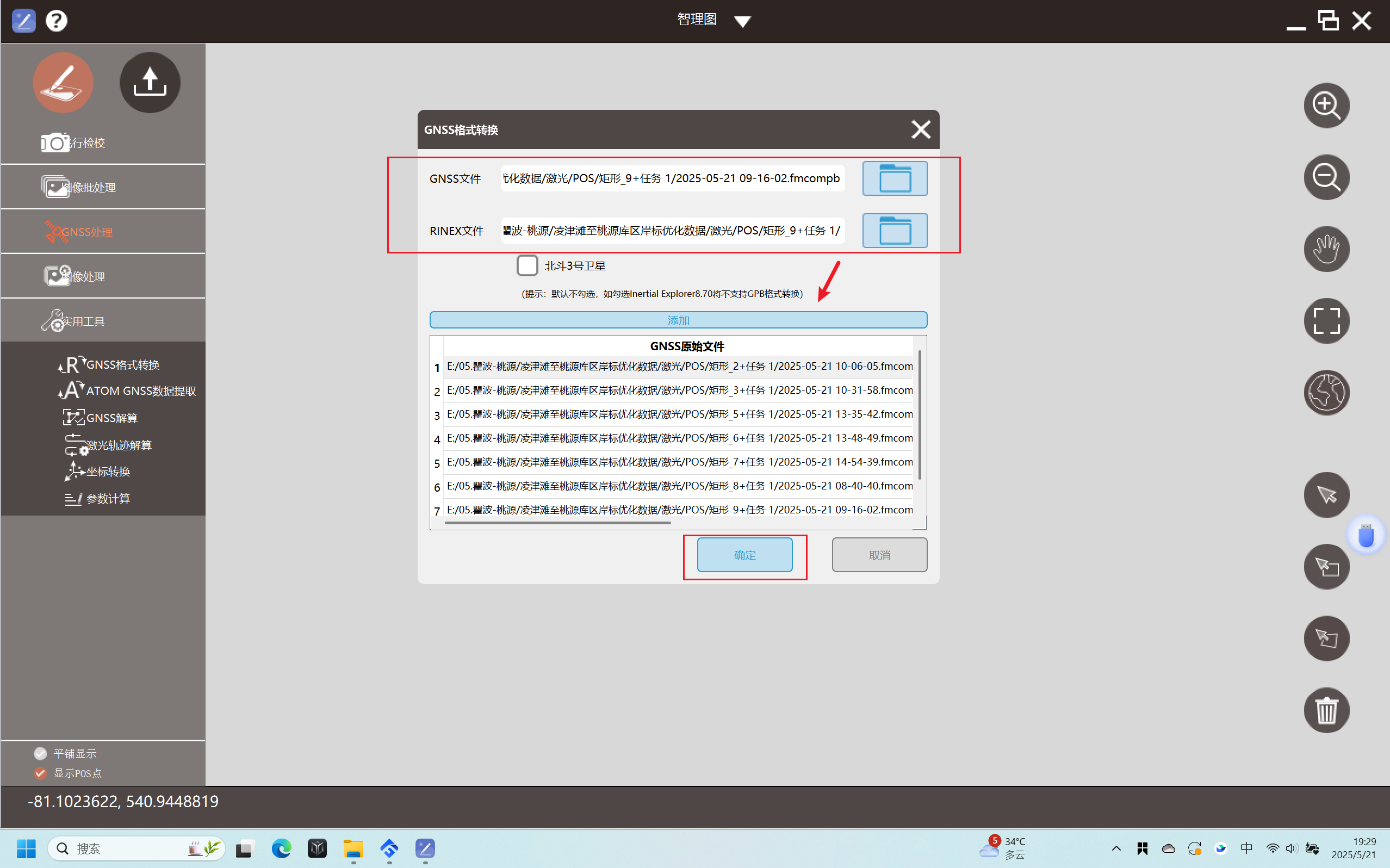
选择GNSS文件(*.fmcompb),RINEX文件栏对自动对应到该文件夹,然后点击添加;重复该步骤,按架次顺序(时间)添加进来,然后点击确定,等待完成。
1.2 GNSS解算
注意:这一步需要一个架次一个架次处理比较费时间,可以多开一个智理图,处理过程不用搞混。
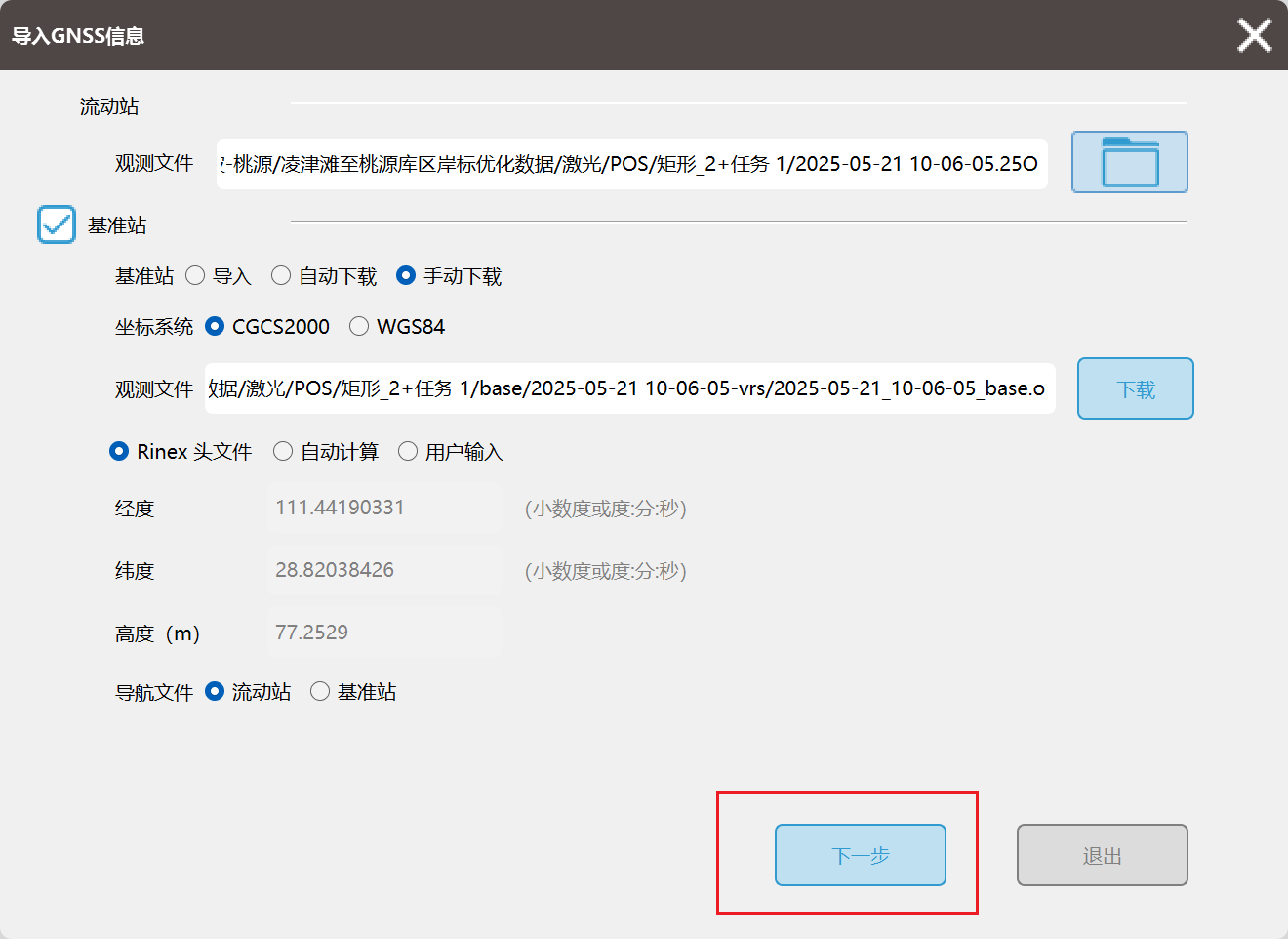
点击GNSS解算,选择观测文件(也就是上一步转换后的文件,*.25O),勾选基准站,选择手动下载,坐标系选择CGCS2000,点击下载按钮。
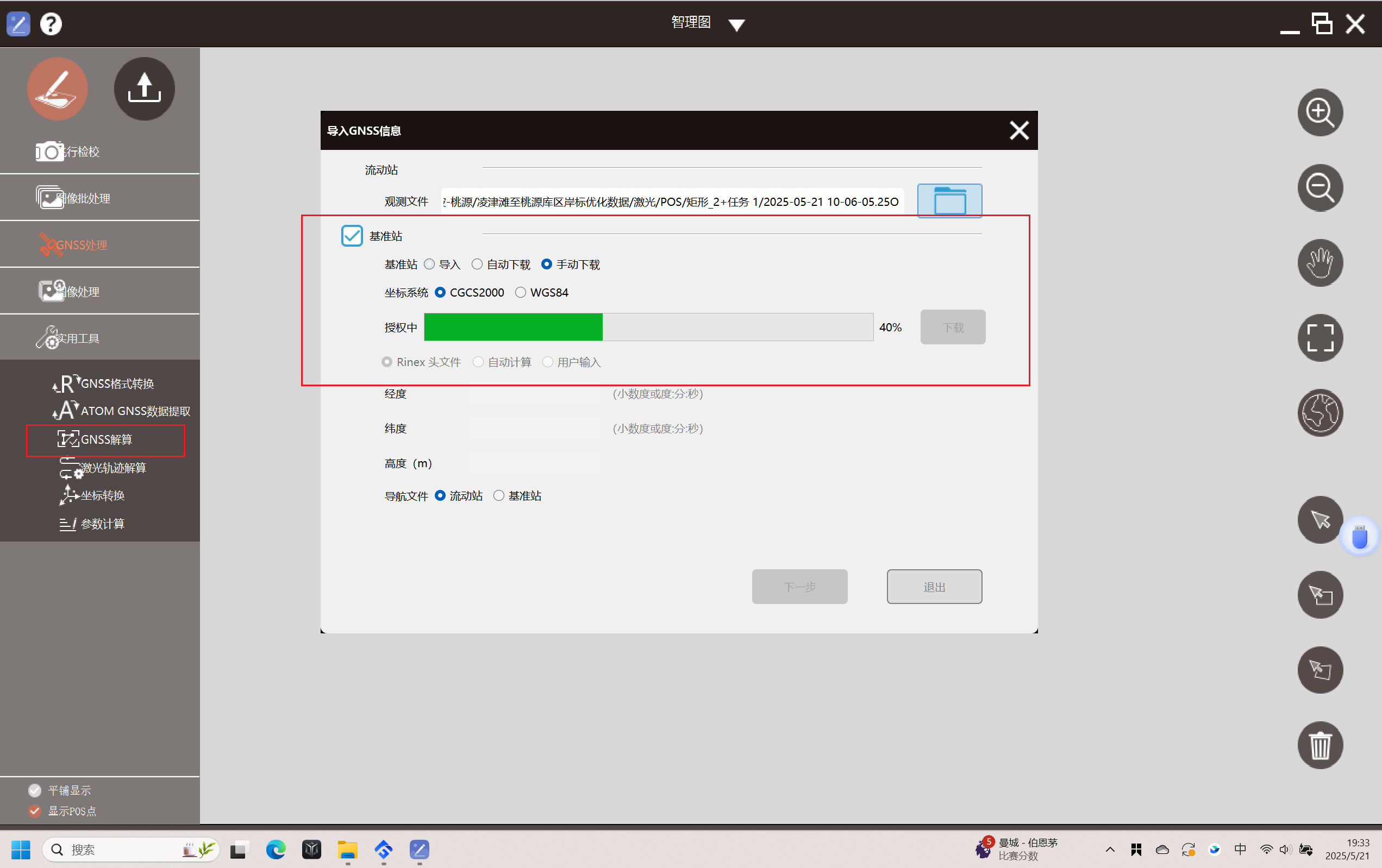
等待下载成功,点击下一步。
选择对应的机型和载荷,比如这次用的:
机型:D2000
载荷:CAM2000
解算方式:融合
选择RTK轨迹数据(*.fmnav),选择保存路径,建议放同一个架次文件夹之下。
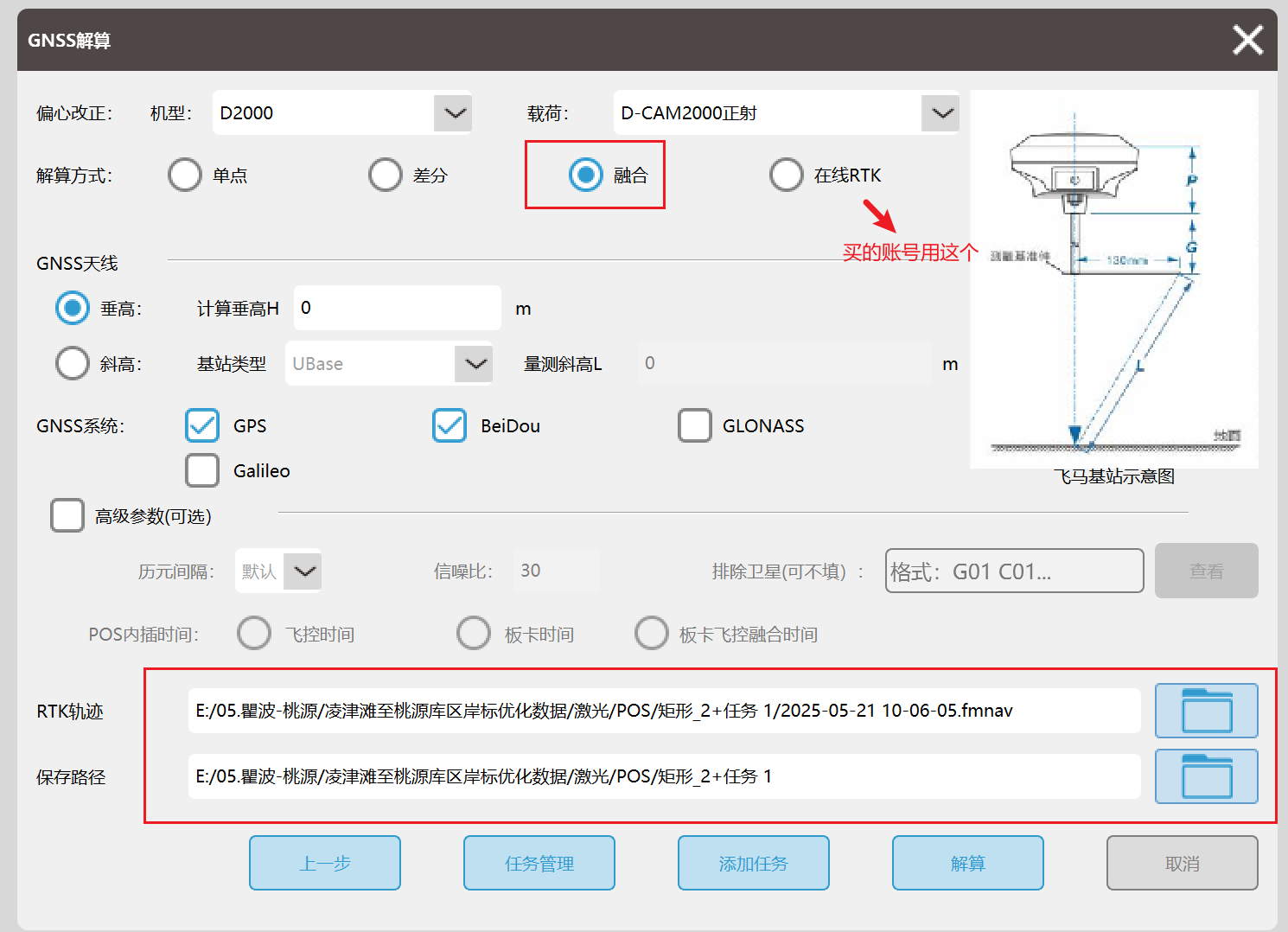
点击解算,等待处理结束。
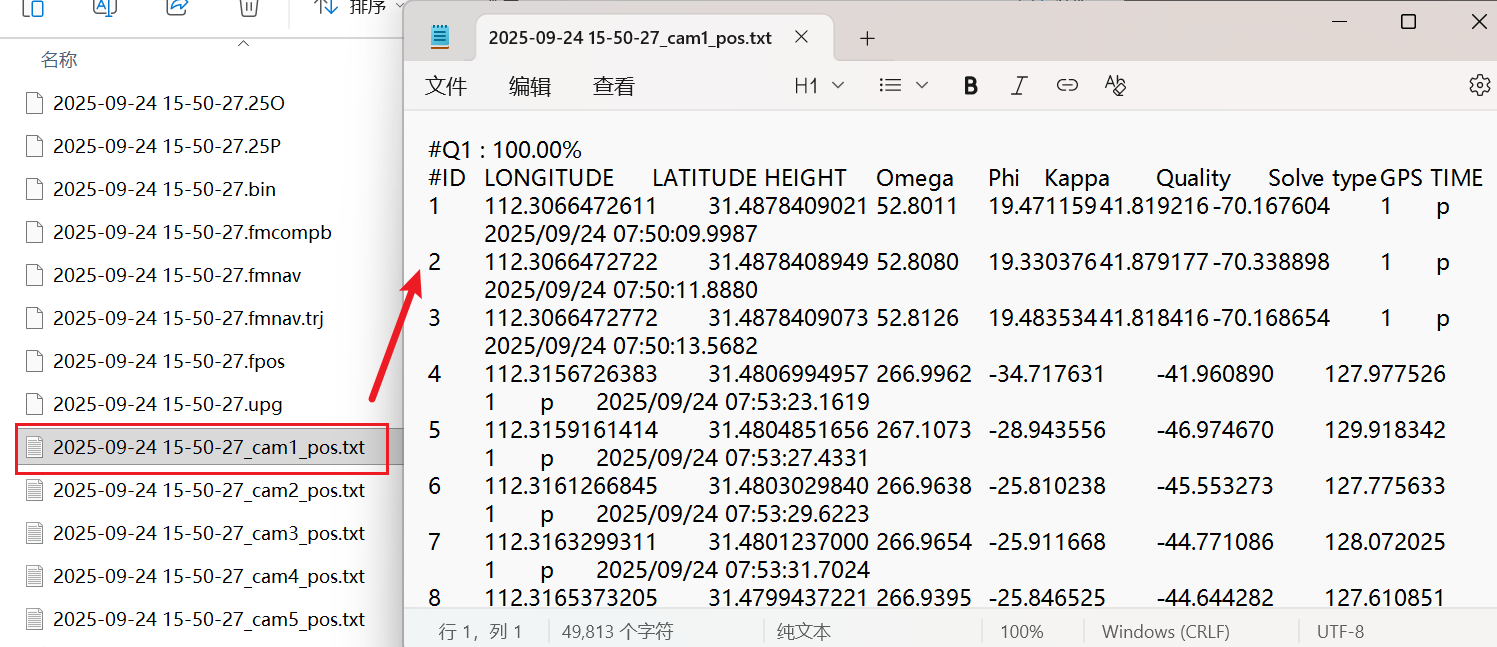
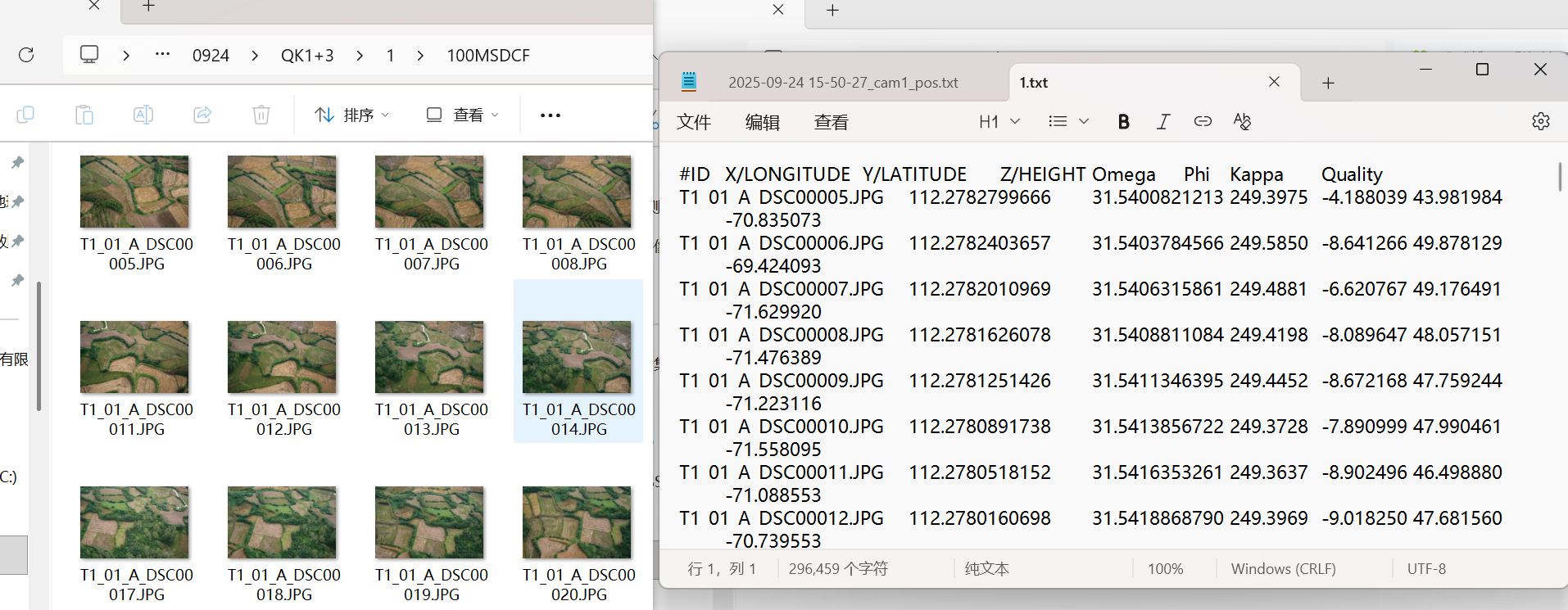
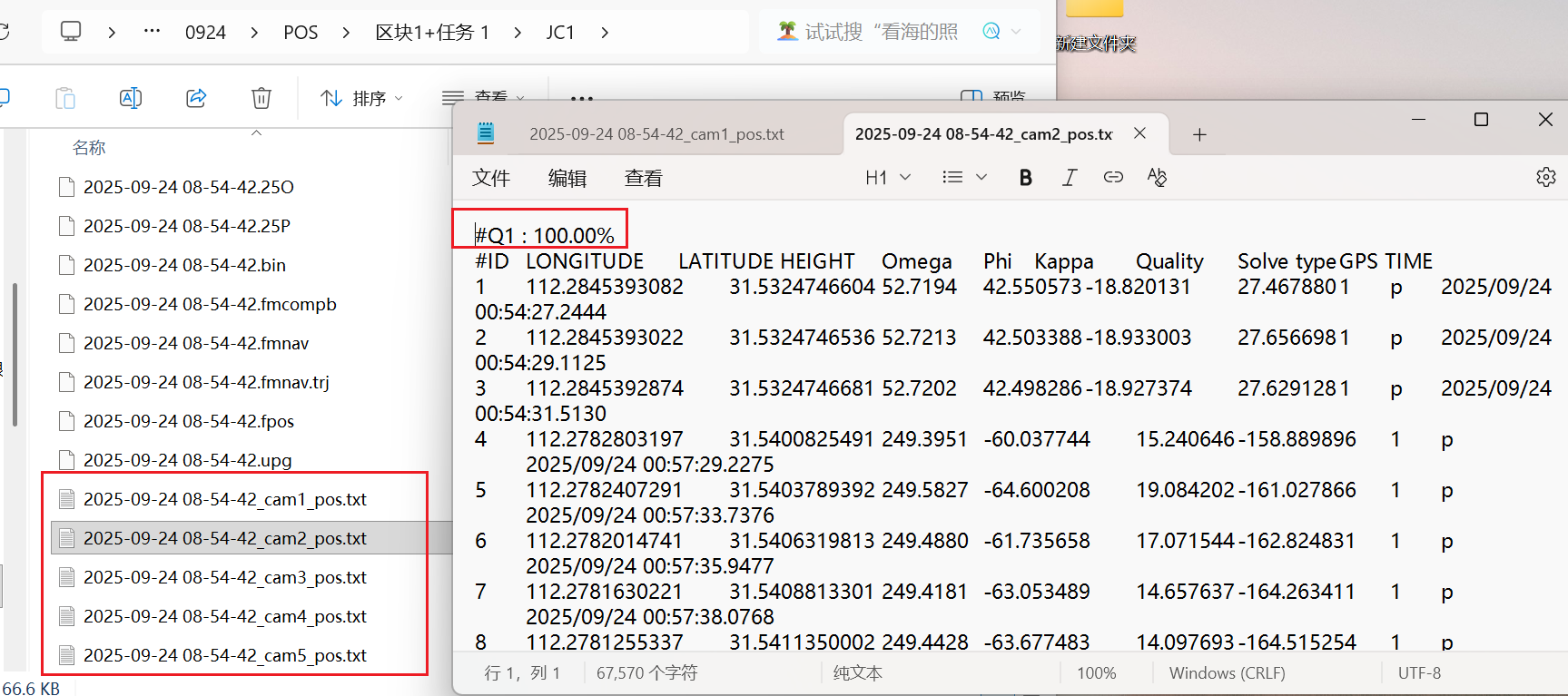
得到pos数据(此图为倾斜五个镜头的)
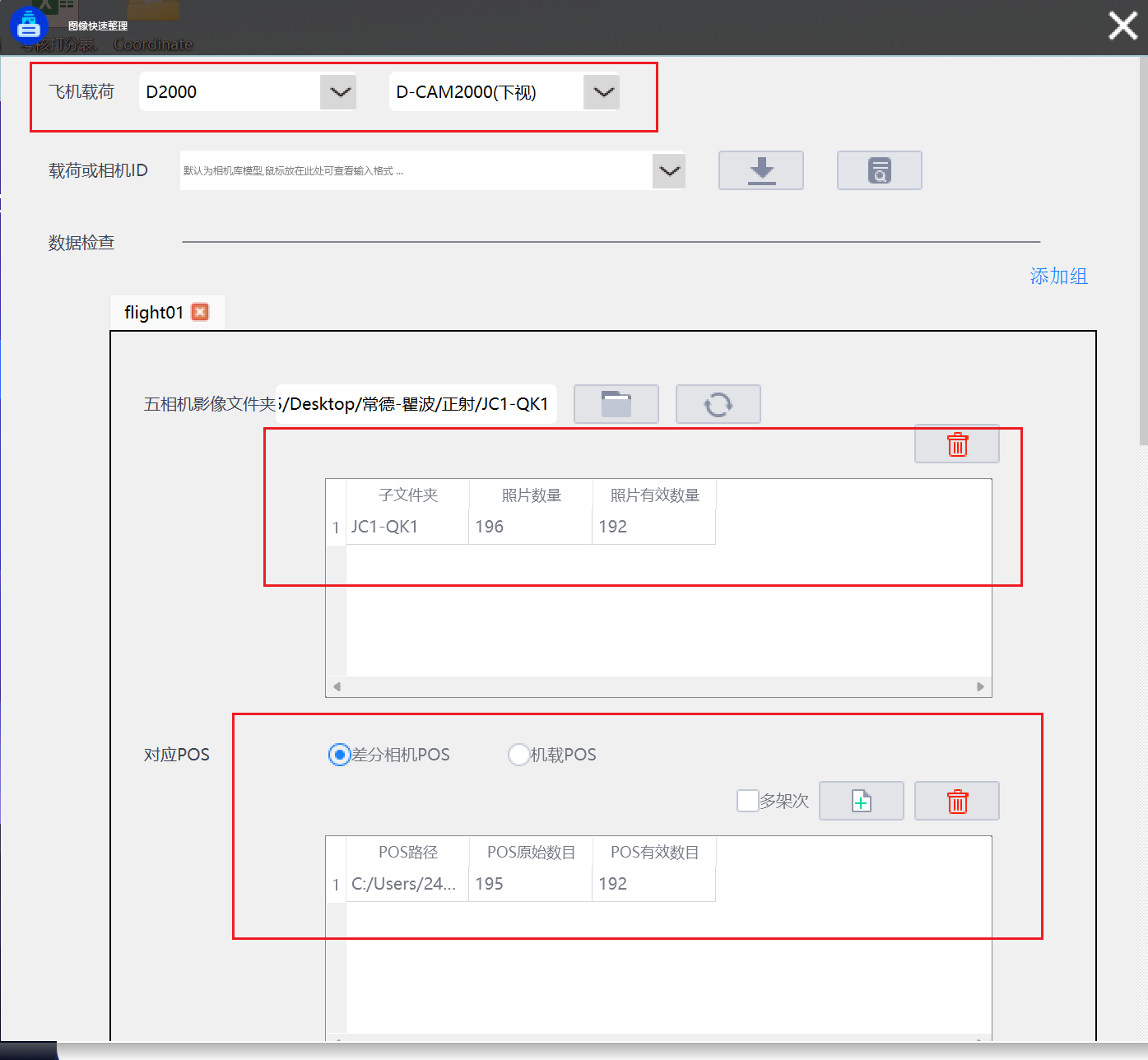
2 图像快速整理
点击图像快速整理
2.1 正射影像整理
-
选择飞机载荷信息
-
选择影像文件夹
-
添加POS文件(也就是POS解算的结果)
-
多架次的话,需要勾选多架次,按顺序依次将POS进行添加
-
影像重命名:添加前缀,避免跟之前或者别人的影像名字重复,导致处理出问题
-
去除相片旋转
-
生成管家工程文件(该文件没用,之后可以删除,之前老版本是需要生成,现在好像不是必需了)

-
选择数据整理方式,一般针对原始影像,因为数据量太大了。
-
点击整理,等待完成,将试拍照片删除
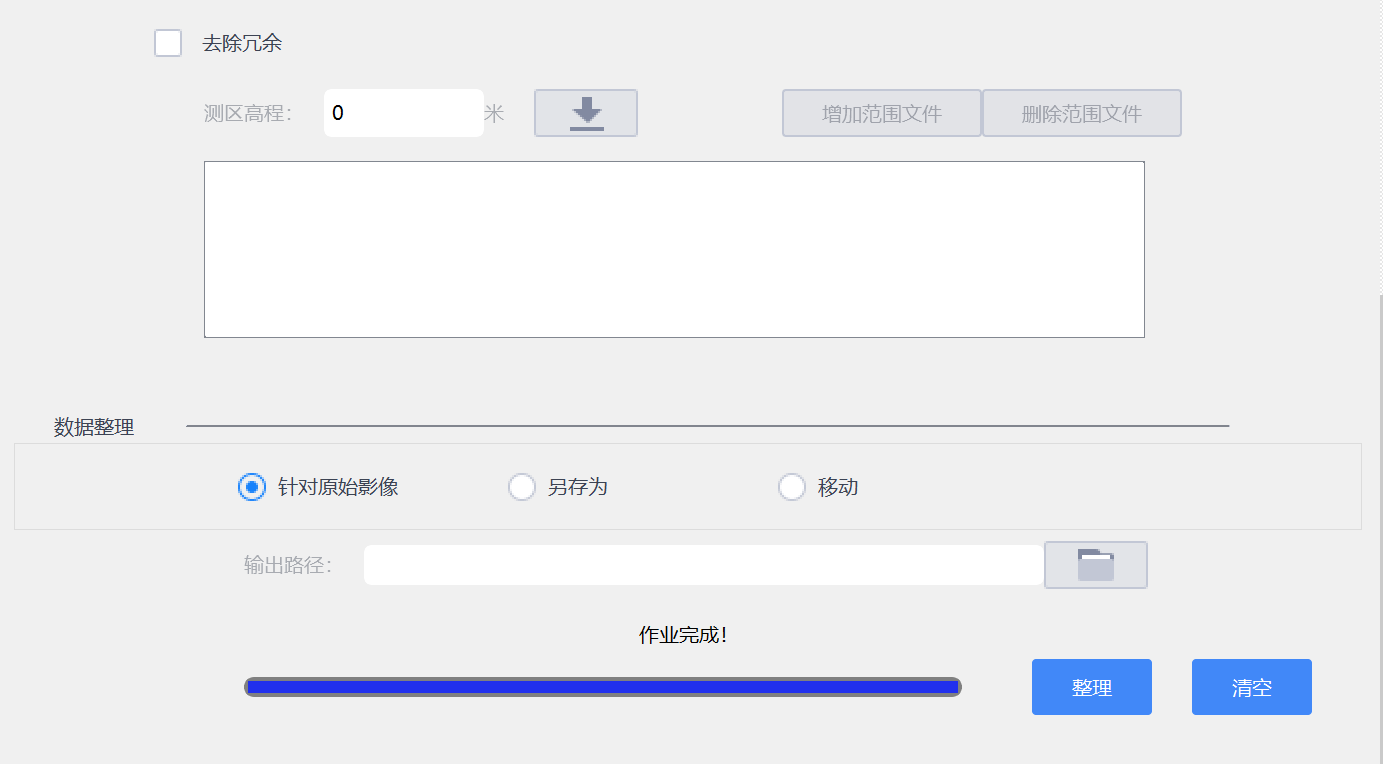
整理完成后的数据
2.2 倾斜影像整理
与前者操作一样,唯一区别就是需要影像整理前检查一下POS解算后的Q值,Q值一般接近100%(大于95%),说明数据质量可以。
至此数据预处理完毕,后面就是软件跑图了。