人工智能的推理方法实验-用归结原理解决机器人搬盒子问题
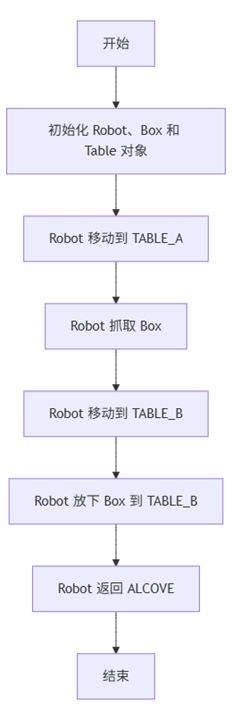
实验内容 机器人搬盒子问题。一个机器人ROBOT,一个壁橱ALCOVE,一个积木块BOX,两个桌子A和B。开始时机器人ROBOT在壁橱ALCOVE旁边,两手空空。桌子A上放着积木块BOX.桌子B是空着的,机器人把积木块BOX从桌子A上搬到桌子B上,然后回到壁橱旁。用归结原理求解问题。 | ||||||||||||
实验原理及流程图 归结原理(Resolution Principle) 1)基本思想:通过逻辑推理验证目标是否可从初始状态和规则集合中推出。 2)核心步骤:
3)步骤流程:
4)流程图
|
#python实现
import matplotlib.pyplot as plt
import matplotlib.animation as animation
import timeplt.rcParams['font.sans-serif'] = ['SimHei']
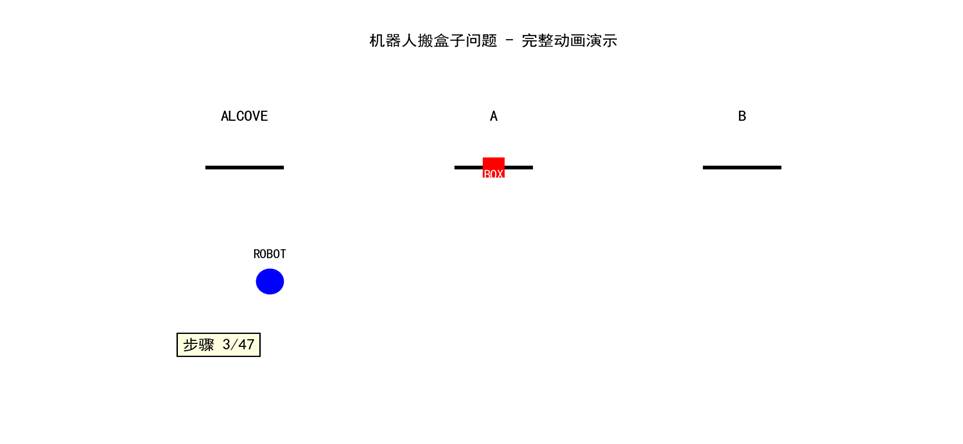
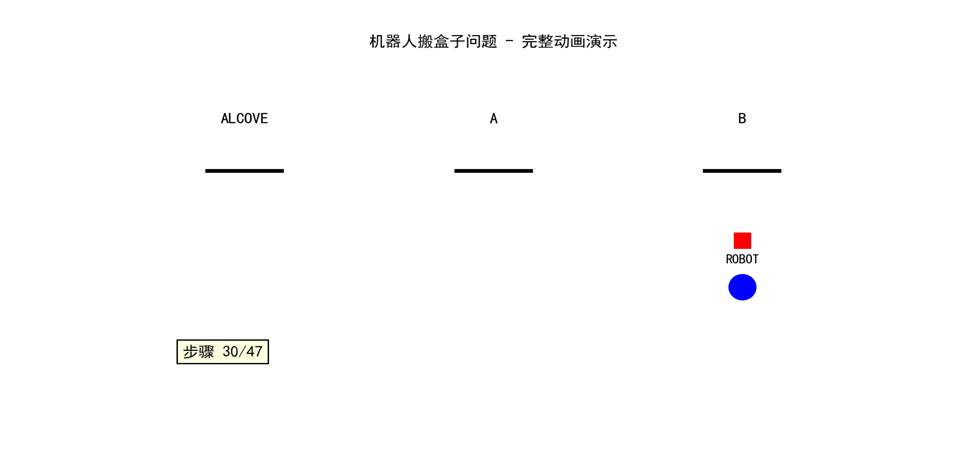
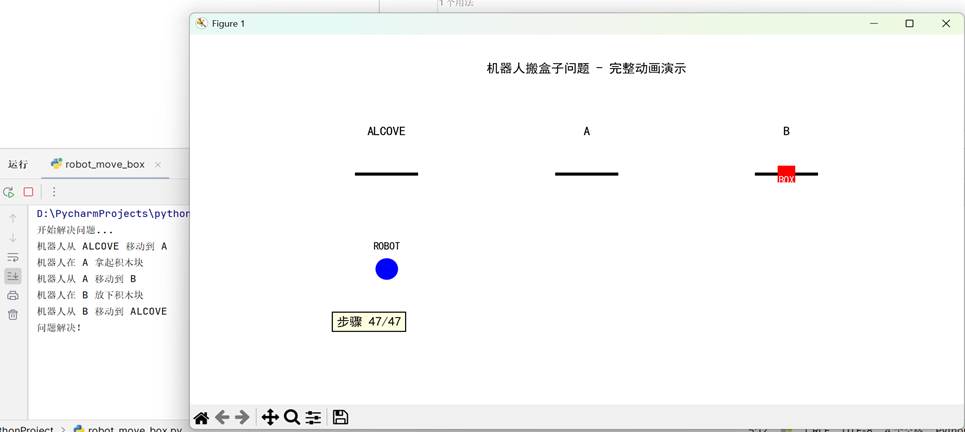
plt.rcParams['axes.unicode_minus'] = Falseclass Robot:def __init__(self):self.location = "ALCOVE"self.hands_empty = Trueself.box_location = "A"self.target_location = "B"# 坐标系统 (x, y)self.positions = {"ALCOVE": (1, 0.5),"A": (3, 0.5),"B": (5, 0.5)}self.current_pos = self.positions[self.location]self.frames = []def record_frame(self):frame = {"robot_pos": self.current_pos,"box_pos": self.box_location,"hands_empty": self.hands_empty,"location": self.location}self.frames.append(frame)def move(self, destination):print(f"机器人从 {self.location} 移动到 {destination}")start_pos = self.current_posend_pos = self.positions[destination]steps = 10for i in range(steps + 1):progress = i / stepsx = start_pos[0] + (end_pos[0] - start_pos[0]) * progressy = start_pos[1] + (end_pos[1] - start_pos[1]) * progressself.current_pos = (x, y)self.record_frame()time.sleep(0.1)self.location = destinationself.current_pos = self.positions[destination]self.record_frame()def pick_up(self):if self.location == self.box_location and self.hands_empty:print(f"机器人在 {self.location} 拿起积木块")self.hands_empty = Falsefor _ in range(5):self.record_frame()time.sleep(0.1)else:print("拿起失败!")def put_down(self):if not self.hands_empty:print(f"机器人在 {self.location} 放下积木块")self.box_location = self.locationself.hands_empty = True# 放下动作需要多帧表现for _ in range(5):self.record_frame()time.sleep(0.1)else:print("放下失败!")def solve_problem(self):print("开始解决问题...")self.record_frame() # 初始状态self.move("A")self.pick_up()self.move("B")self.put_down()self.move("ALCOVE")print("问题解决!")class Visualizer:def __init__(self, robot):self.fig, self.ax = plt.subplots(figsize=(10, 5))self.robot = robotself.ani = Nonedef init_plot(self):self.ax.clear()self.ax.set_xlim(0, 6)self.ax.set_ylim(0, 1.5)self.ax.set_title("机器人搬盒子问题 - 完整动画演示")self.ax.axis('off')# 绘制固定物体for name, pos in self.robot.positions.items():self.ax.text(pos[0], 1.2, name, ha='center', fontsize=12)self.ax.plot([pos[0] - 0.3, pos[0] + 0.3], [1.0, 1.0], 'k-', linewidth=3)return []def update_frame(self, frame_num):self.ax.clear()self.init_plot()frame = self.robot.frames[frame_num]# 绘制机器人robot_x, robot_y = frame["robot_pos"]self.ax.plot(robot_x, robot_y, 'bo', markersize=20)self.ax.text(robot_x, robot_y + 0.1, "ROBOT", ha='center', fontsize=10)# 绘制积木块if frame["hands_empty"]:box_pos = self.robot.positions[frame["box_pos"]]self.ax.plot(box_pos[0], 1.0, 'rs', markersize=15)self.ax.text(box_pos[0], 0.95, "BOX", ha='center', color='white')else:# 手持状态self.ax.plot(robot_x, robot_y + 0.2, 'rs', markersize=12)# 显示当前步骤step_text = f"步骤 {frame_num + 1}/{len(self.robot.frames)}"self.ax.text(0.5, 0.2, step_text, fontsize=12, bbox=dict(facecolor='lightyellow'))return []def animate(self):self.ani = animation.FuncAnimation(self.fig, self.update_frame,frames=len(self.robot.frames),init_func=self.init_plot,interval=300, # 每帧间隔(毫秒)blit=False,repeat=False)plt.show()if __name__ == "__main__":# 创建机器人和可视化器robot = Robot()visualizer = Visualizer(robot)# 解决问题并记录所有帧robot.solve_problem()# 显示完整动画visualizer.animate()# 保持窗口打开
plt.show()
//Java实现
class Robot {private String location;private boolean holdingBox;public Robot(String location) {this.location = location;this.holdingBox = false;}public String getLocation() {return location;}public void setLocation(String location) {this.location = location;}public boolean isHoldingBox() {return holdingBox;}public void setHoldingBox(boolean holdingBox) {this.holdingBox = holdingBox;}public void move(String toLocation) {System.out.println("Robot moves from " + location + " to " + toLocation);location = toLocation;}public void grab(Box box) {if (box.getLocation().equals(location) && !holdingBox) {System.out.println("Robot grabs the box from " + location);box.setLocation("held by robot");holdingBox = true;}}public void drop(Box box, Table table) {if (table.getLocation().equals(location) && holdingBox) {System.out.println("Robot drops the box on " + table.getName());box.setLocation(table.getName());holdingBox = false;}}
}class Box {private String location;public Box(String location) {this.location = location;}public String getLocation() {return location;}public void setLocation(String location) {this.location = location;}
}class Table {private String name;private String location;public Table(String name, String location) {this.name = name;this.location = location;}public String getName() {return name;}public String getLocation() {return location;}
}public class RobotBox {public static void main(String[] args) {Robot robot = new Robot("ALCOVE");Box box = new Box("TABLE_A");Table tableA = new Table("TABLE_A", "TABLE_A");Table tableB = new Table("TABLE_B", "TABLE_B");// Inference processrobot.move("TABLE_A");robot.grab(box);robot.move("TABLE_B");robot.drop(box, tableB);robot.move("ALCOVE");}
}
//c++实现
#include <iostream>
#include <string>class Box {
private:std::string location;public:Box(const std::string& location) : location(location) {}std::string getLocation() const {return location;}void setLocation(const std::string& location) {this->location = location;}
};class Table {
private:std::string name;std::string location;public:Table(const std::string& name, const std::string& location) : name(name), location(location) {}std::string getName() const {return name;}std::string getLocation() const {return location;}
};class Robot {
private:std::string location;bool holdingBox;public:Robot(const std::string& location) : location(location), holdingBox(false) {}std::string getLocation() const {return location;}void setLocation(const std::string& location) {this->location = location;}bool isHoldingBox() const {return holdingBox;}void setHoldingBox(bool holdingBox) {this->holdingBox = holdingBox;}void move(const std::string& toLocation) {std::cout << "Robot moves from " << location << " to " << toLocation << std::endl;location = toLocation;}void grab(Box& box) {if (box.getLocation() == location && !holdingBox) {std::cout << "Robot grabs the box from " << location << std::endl;box.setLocation("held by robot");holdingBox = true;}}void drop(Box& box, Table& table) {if (table.getLocation() == location && holdingBox) {std::cout << "Robot drops the box on " << table.getName() << std::endl;box.setLocation(table.getName());holdingBox = false;}}
};int main() {Robot robot("ALCOVE");Box box("TABLE_A");Table tableA("TABLE_A", "TABLE_A");Table tableB("TABLE_B", "TABLE_B");// Inference processrobot.move("TABLE_A");robot.grab(box);robot.move("TABLE_B");robot.drop(box, tableB);robot.move("ALCOVE");return 0;
}
实验心得及体会 通过这次实验,我深刻理解了如何使用面向对象编程来模拟现实世界的问题。Java、C++和Python三种不同语言的实现虽然语法上有所差异,但它们的核心思想是一致的:通过类和对象来表示实体(如机器人、箱子和桌子),并通过方法来定义这些实体的行为。在Java和C++的实现中,主要关注的是基本的面向对象特性,如封装、继承和多态的应用。这两个版本的代码结构清晰,易于理解和维护,适合处理简单的逻辑控制。而Python的实现则更进一步,利用matplotlib库实现了动画效果,使得问题的解决过程可视化。 |