OpenCV:人脸检测,Haar 级联分类器原理
目录
一、Haar 级联分类器的核心逻辑:从特征到筛选
1.1 第一步:用 Haar 特征描述人脸的 “灰度差异”
1.1.1 4类核心 Haar 特征
1.1.2 特征值的计算逻辑
1.1.3 特征的三个关键变量
1.2 第二步:多级分类器的 “漏斗式” 筛选
二、预训练模型
三、实战:用 Haar 级联分类器实现人脸检测
3.1 完整代码(含详细注释)
3.2 关键参数调优:解决 “漏检 / 误检” 问题
四、Haar 级联分类器的适用场景与边界
优势:适合入门与轻量场景
局限:需注意使用边界
在 OpenCV 的人脸检测技术中,Haar 级联分类器凭借高效的定位能力和低部署门槛,成为计算机视觉入门的核心工具。它通过捕捉人脸灰度特征与多级筛选机制,实现从图像中快速定位人脸的目标,广泛应用于人脸识别、表情分析等场景。
一、Haar 级联分类器的核心逻辑:从特征到筛选
人脸检测的关键需求是 “快速排除非人脸区域、精准定位有效人脸”,Haar 级联分类器通过 “局部特征描述 + 多级分类验证” 的组合,完美契合这一需求,具体可拆分为两步核心流程。
1.1 第一步:用 Haar 特征描述人脸的 “灰度差异”
人脸的关键部位(如眼睛、鼻梁、嘴唇)存在明显的灰度变化规律 —— 比如眼睛区域比脸颊暗、鼻梁比两侧亮,而 Haar 特征正是通过 “矩形区域的灰度对比” 来捕捉这些规律,作为判断 “是否为人脸局部” 的依据。
1.1.1 4类核心 Haar 特征
不同类型的 Haar 特征对应人脸不同部位的灰度特点,覆盖从轮廓到细节的检测需求:
边缘特征:检测明暗区域的边界,比如人脸轮廓、眉毛与额头的分界处,通过 “亮区 - 暗区” 的边缘对比定位人脸轮廓范围。
线特征:检测细线条的明暗差异,适用于鼻梁边缘、嘴唇上下沿等细长部位,通过窄条亮区与两侧暗区的对比锁定关键结构。
中心环绕特征:检测中心区域与周围区域的灰度差,典型场景是瞳孔(中心暗区)与虹膜(周围亮区)的对比,可精准定位眼部位置。
对角线特征:检测对角线方向的灰度变化,针对眼角、嘴角等倾斜角度的部位,补充其他特征的检测盲区。
1.1.2 特征值的计算逻辑
对每个 Haar 特征对应的矩形区域,通过公式计算特征值,判断当前区域是否符合人脸局部规律:特征值 = 矩形内白色区域像素值总和 - 黑色区域像素值总和例如,检测眼睛时,若特征值为负(说明暗区像素和更小),则该区域大概率是眼睛;若特征值为正,可能是脸颊等亮区,直接排除。
1.1.3 特征的三个关键变量
为覆盖不同位置、大小的人脸,Haar 特征的矩形框需满足三个变量调整:
位置:矩形框逐像素遍历整个图像,不遗漏任何可能存在人脸的区域。
大小:矩形框可按比例缩放,适配图像中不同尺寸的人脸(如远处的小脸、近处的大脸)。
类型:根据检测目标选择对应特征类型,比如检测眼睛用中心环绕特征,检测轮廓用边缘特征。
1.2 第二步:多级分类器的 “漏斗式” 筛选
单一 Haar 特征无法区分人脸与非人脸(比如 “暗块” 可能是污渍而非眼睛),因此需要通过 “多级分类器” 层层过滤,逐步缩小范围,最终定位真实人脸。
整个筛选流程类似 “漏斗”,从宽到严逐步筛选:
快速过滤阶段:用 1-2 个简单的 Haar 特征(如 “中间暗、上下亮” 的眼部特征)扫描图像,将明显不符合人脸规律的区域(如纯黑背景、单一颜色墙面)直接排除,这一步可过滤掉 80% 以上的非人脸区域,大幅减少后续计算量。
逐步验证阶段:对剩余区域,用更多、更复杂的 Haar 特征组合(如 “双眼 + 鼻梁 + 嘴唇” 的特征集合)进行验证,只有同时满足多个特征规律的区域,才能进入下一阶段。
精准判定阶段:用覆盖人脸所有关键部位的复杂特征集合做最终验证,只有通过所有阶段筛选的区域,才被判定为 “人脸”,确保检测结果的准确性。
二、预训练模型
训练一个完整的 Haar 级联分类器,需要大量的正负样本(数千张人脸图与非人脸图)和长时间的计算优化。为降低使用门槛,官方提供了多种预训练好的模型文件(以 XML 格式存储),直接加载即可实现对应场景的检测,常用模型如下:
| 模型文件名 | 核心功能 | 适用场景 |
|---|---|---|
haarcascade_frontalface_default.xml | 正面人脸检测 | 日常场景的人脸定位(如证件照、正面人像) |
haarcascade_eye.xml | 眼睛检测 | 辅助验证人脸(如排除无眼部区域的误检) |
haarcascade_smile.xml | 微笑检测 | 表情分析(如判断是否处于开心状态) |
haarcascade_frontalface_alt2.xml | 增强版正面人脸检测 | 光照不佳、轻微模糊场景的人脸定位 |
这些模型文件可在官方仓库获取,也可在 OpenCV 安装目录的data/haarcascades文件夹中找到,直接复制到代码同级目录即可调用。
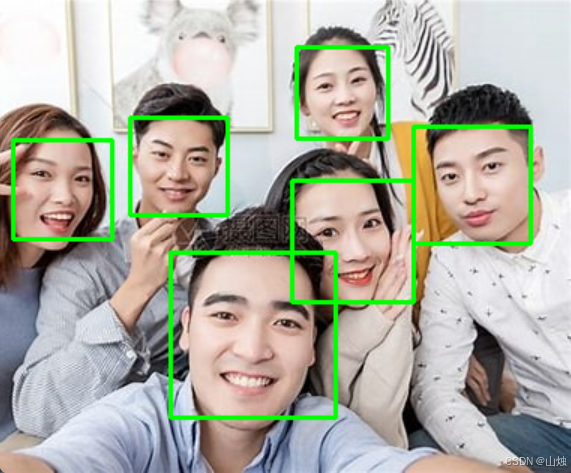
三、实战:用 Haar 级联分类器实现人脸检测
结合上述原理,以下代码完整覆盖 “图像预处理→模型加载→人脸检测→结果可视化” 全流程,可直接复制运行,快速实现人脸定位功能。
3.1 完整代码(含详细注释)
import cv2# 1. 读取待检测图像(默认读取为BGR颜色格式)
# 注意:替换为你的图像路径,支持相对路径(同级目录)或绝对路径
image = cv2.imread("test_face.jpg")
# 检查图像是否成功读取,避免路径错误导致后续崩溃
if image is None:print("错误:未找到图像文件,请检查路径是否正确!")exit()# 2. 图像预处理:转为灰度图
# 原因:Haar特征依赖灰度值计算,彩色图会增加冗余计算且无额外收益
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 3. 加载预训练的Haar级联分类器(核心步骤)
# 确保xml模型文件与代码在同一目录,或填写完整路径
face_cascade = cv2.CascadeClassifier("haarcascade_frontalface_default.xml")
# 检查分类器是否成功加载
if face_cascade.empty():print("错误:未找到分类器文件,请检查xml文件路径!")exit()# 4. 执行人脸检测(核心API:detectMultiScale)
# 参数说明:
# - gray_image:输入灰度图
# - scaleFactor=1.05:扫描窗口缩放比例(每次缩小5%,值越小检测越精细但速度越慢)
# - minNeighbors=9:最小邻居数(需9个相邻检测框确认才判为人脸,减少误检)
# - minSize=(30, 30):最小人脸尺寸(小于30x30的区域忽略,避免检测微小噪声)
faces = face_cascade.detectMultiScale(gray_image,scaleFactor=1.05,minNeighbors=9,minSize=(30, 30)
)# 5. 输出检测结果
print(f"检测到{len(faces)}张人脸!")
# 打印人脸位置:(x, y)为矩形框左上角坐标,(w, h)为矩形框宽高
print("人脸位置信息:", faces)# 6. 标注人脸:在原图上绘制绿色矩形框(可视化结果)
for (x, y, w, h) in faces:# 参数:图像、左上角坐标、右下角坐标(x+w, y+h)、颜色(BGR格式,绿色)、线宽cv2.rectangle(image, (x, y), (x + w, y + h), (0, 255, 0), 2)# 7. 显示结果并释放资源
cv2.imshow("Haar级联分类器人脸检测结果", image)
cv2.waitKey(0) # 等待任意键盘按键(0表示无限等待,避免窗口闪退)
cv2.destroyAllWindows() # 关闭所有窗口,释放内存
3.2 关键参数调优:解决 “漏检 / 误检” 问题
实际使用中,若出现 “漏检小脸”“误检非人脸区域” 等问题,可通过调整detectMultiScale的核心参数优化:
scaleFactor(缩放因子):
- 漏检小脸:调小至 1.02(更精细地扫描不同尺寸区域);
- 速度太慢:调大至 1.1(减少扫描次数,提升速度)。
minNeighbors(最小邻居数):
- 误检多(如把墙壁、窗户当人脸):调大至 12(更严格的验证条件);
- 漏检多:调小至 5(放宽验证条件,减少漏检)。
minSize(最小人脸尺寸):
- 图像中人脸较大:设为 (50, 50)(过滤微小噪声区域);
- 图像中人脸较小:设为 (10, 10)(避免漏检小尺寸人脸)。
四、Haar 级联分类器的适用场景与边界
优势:适合入门与轻量场景
- 实时性强:无需 GPU 支持,可在 CPU 上实时运行,部署门槛低,适合嵌入式设备、普通电脑等轻量场景。
- 使用简单:API 调用直观,无需理解复杂的深度学习模型结构,新手可快速上手。
- 多尺度适配:支持检测不同大小的正面人脸,日常拍照、视频监控等场景完全够用。
局限:需注意使用边界
- 误检率较高:容易将非人脸区域(如深色花纹、圆形物体)误判为人脸,需要结合后续逻辑二次验证。
- 角度敏感:仅对正面人脸检测效果好,侧脸、俯视 / 仰视角度的人脸大概率漏检。
- 抗遮挡弱:若人脸被口罩、帽子、刘海等遮挡,关键特征无法识别,会导致检测失败。