✅ Python车牌识别计费系统 PyQt5界面 YOLOv5+CRNN 深度学习 MySQL可视化 车牌检测(建议收藏)
博主介绍:✌全网粉丝50W+,前互联网大厂软件研发、集结硕博英豪成立软件开发工作室,专注于计算机相关专业项目实战6年之久,累计开发项目作品上万套。凭借丰富的经验与专业实力,已帮助成千上万的学生顺利毕业,选择我们,就是选择放心、选择安心毕业✌
> 🍅想要获取完整文章或者源码,或者代做,拉到文章底部即可与我联系了。🍅点击查看作者主页,了解更多项目!
🍅感兴趣的可以先收藏起来,点赞、关注不迷路,大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助同学们顺利毕业 。🍅
1、毕业设计:2026年计算机专业毕业设计选题汇总(建议收藏)✅
2、最全计算机专业毕业设计选题大全(建议收藏)✅
Python停车场车牌识别计费系统:YOLOv5+CRNN+PyQt5全栈开发,支持图片/视频/摄像头
1、项目介绍
技术栈:Python语言、Pyqt5图形界面、YOLOv5、深度学习、Pytorch、CRNN卷积神经网络、matplotlib可视化、停车计费、MySQL数据库
数据集:自建停车场车牌图片集(已标注车牌位置与字符)
识别场景:图片、视频、摄像头实时流
输出:车牌号码、识别置信度、车牌位置坐标、停车时长、计费金额,支持结果导出(jpg/mp4/csv)
研究背景:传统停车场人工录入车牌效率低且易出错;车牌识别技术可实现自动化管理,提升通行效率与计费准确性。
研究意义:将YOLOv5目标检测、CRNN字符识别、PyQt5界面展示深度整合,形成“采集-识别-计费-展示-导出”闭环,为停车场、高速、小区出入口提供低成本、高效率的车牌识别计费方案,适合毕业设计与工程实践落地。
2、项目界面
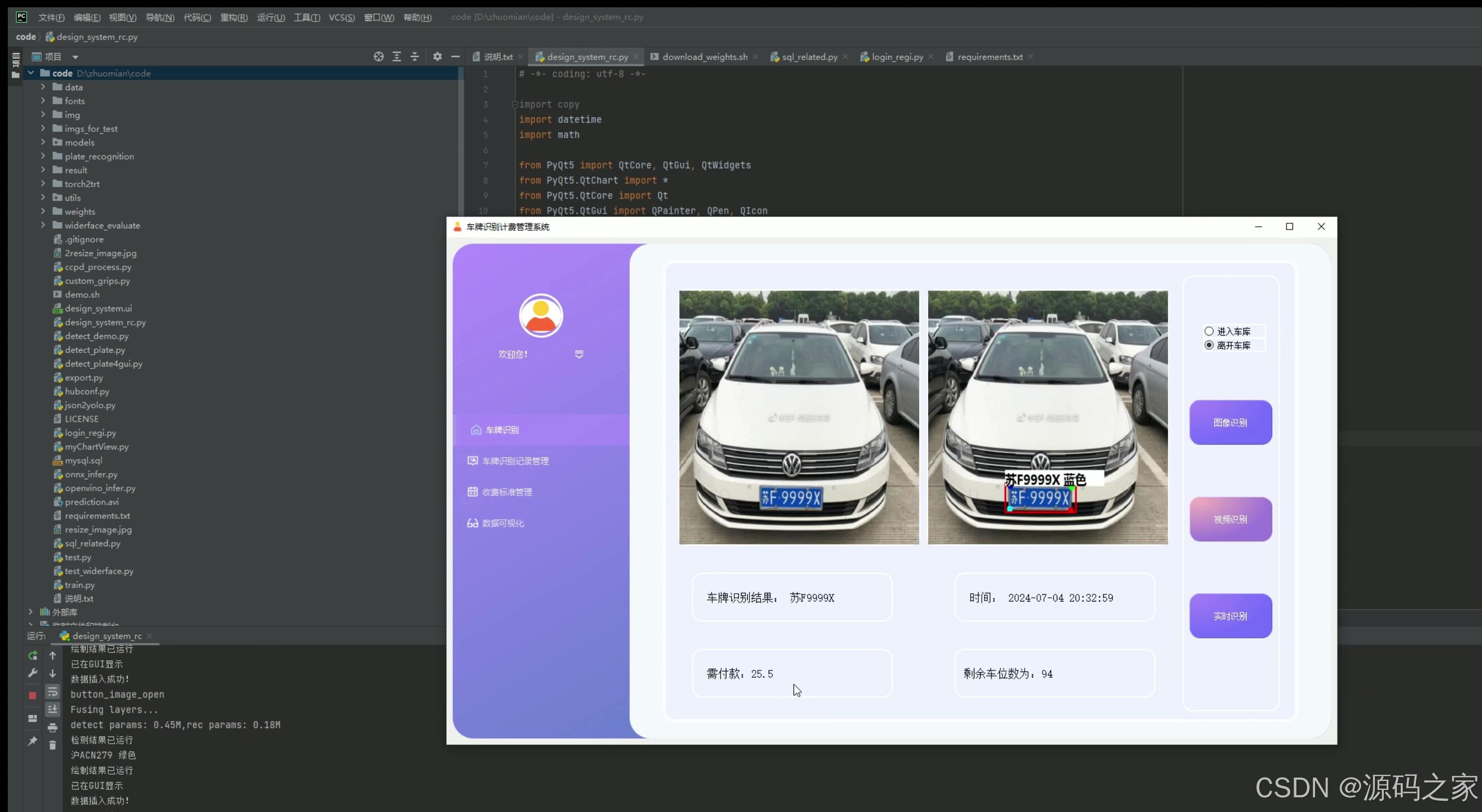
(1)出库–车牌识别计费
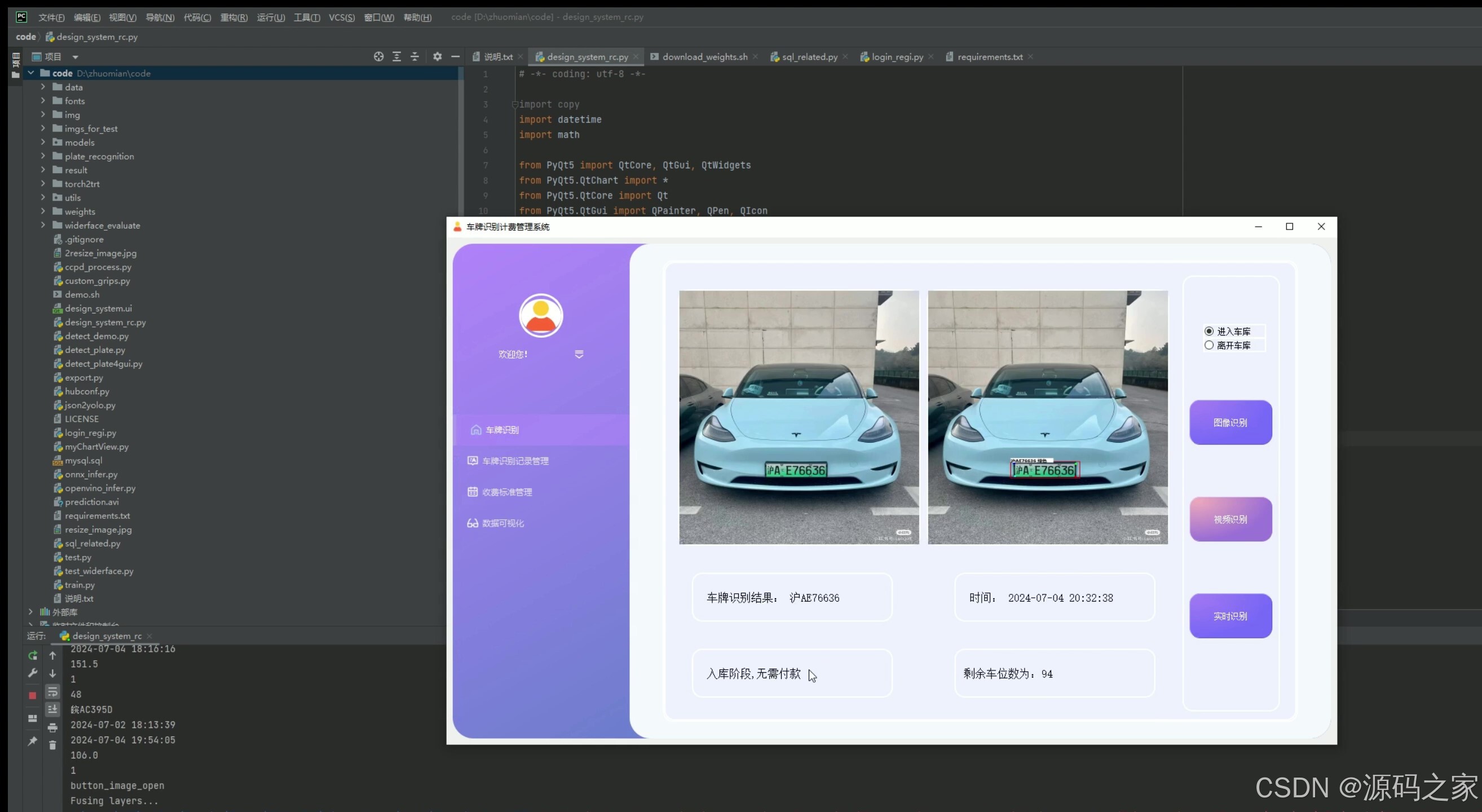
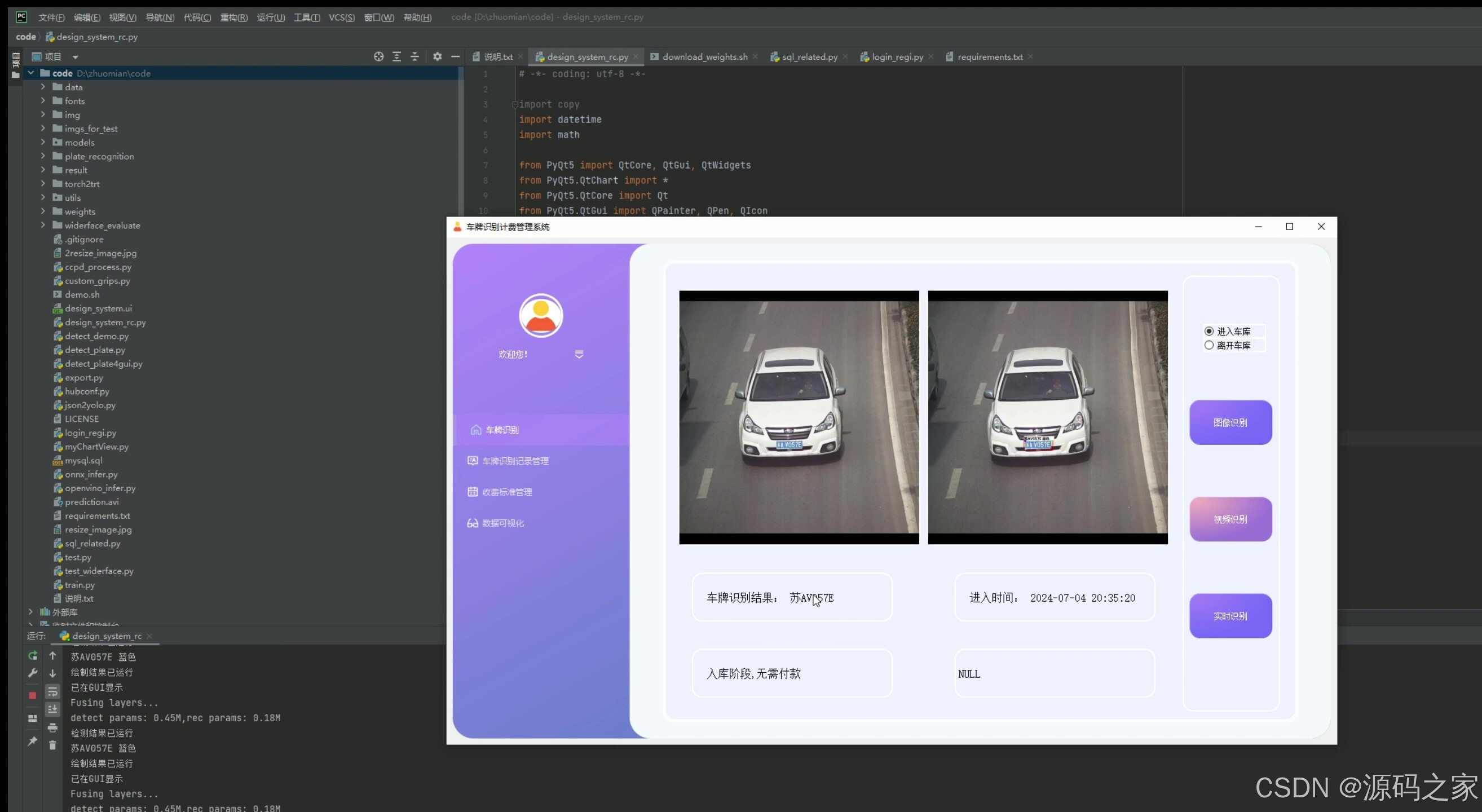
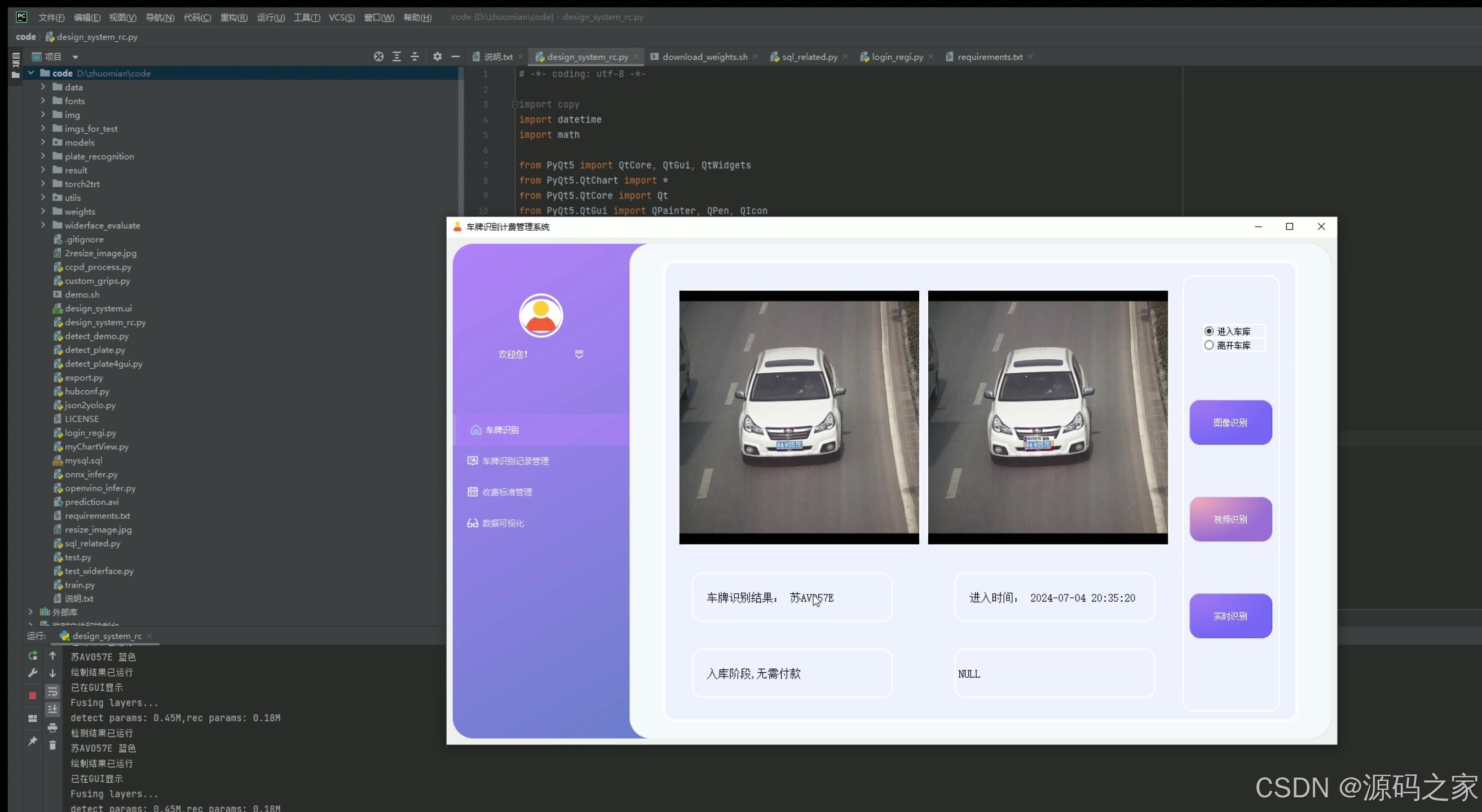
(2)入库–车牌识别
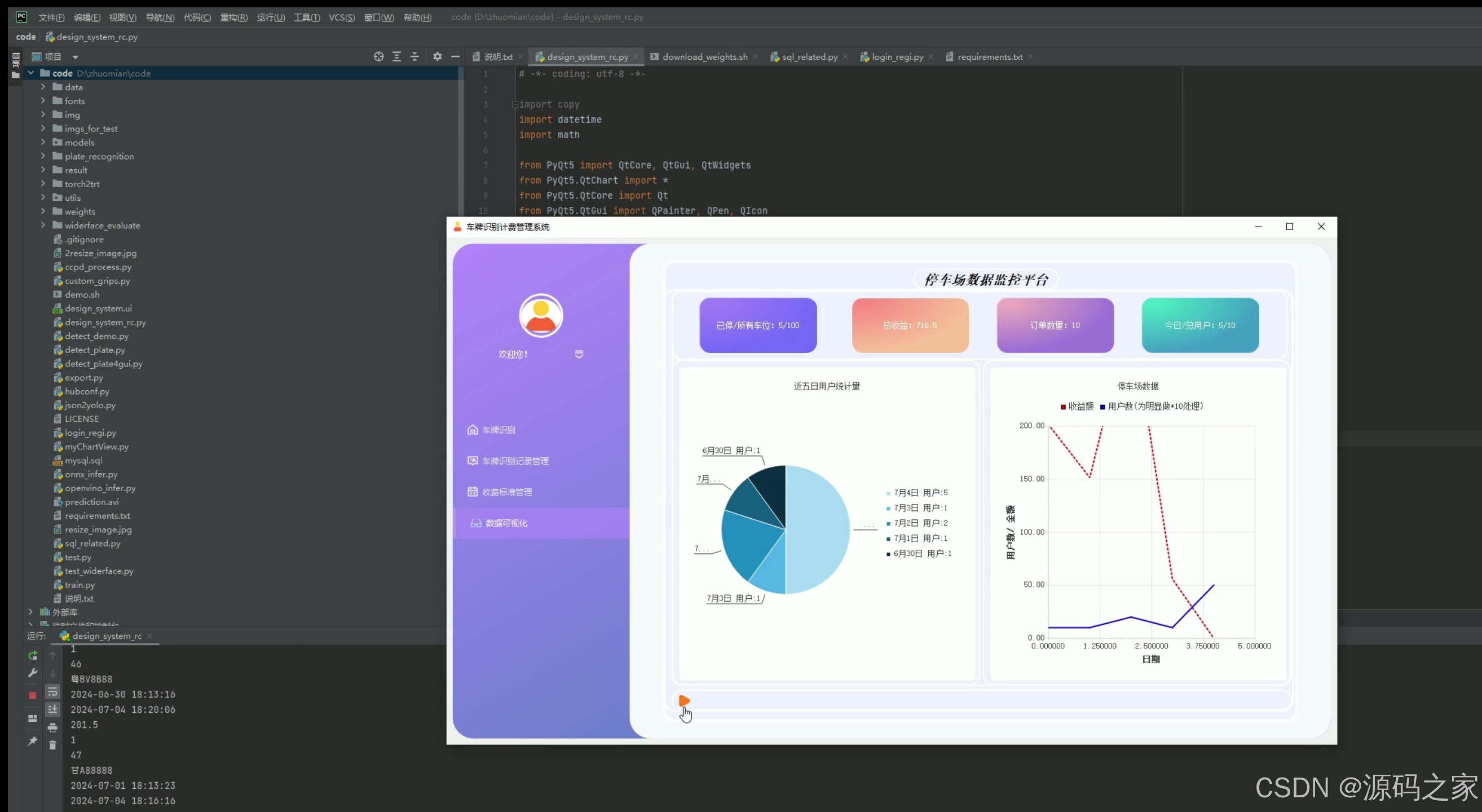
(3)数据分析可视化–停车数据、收费统计数据、饼图、折线图
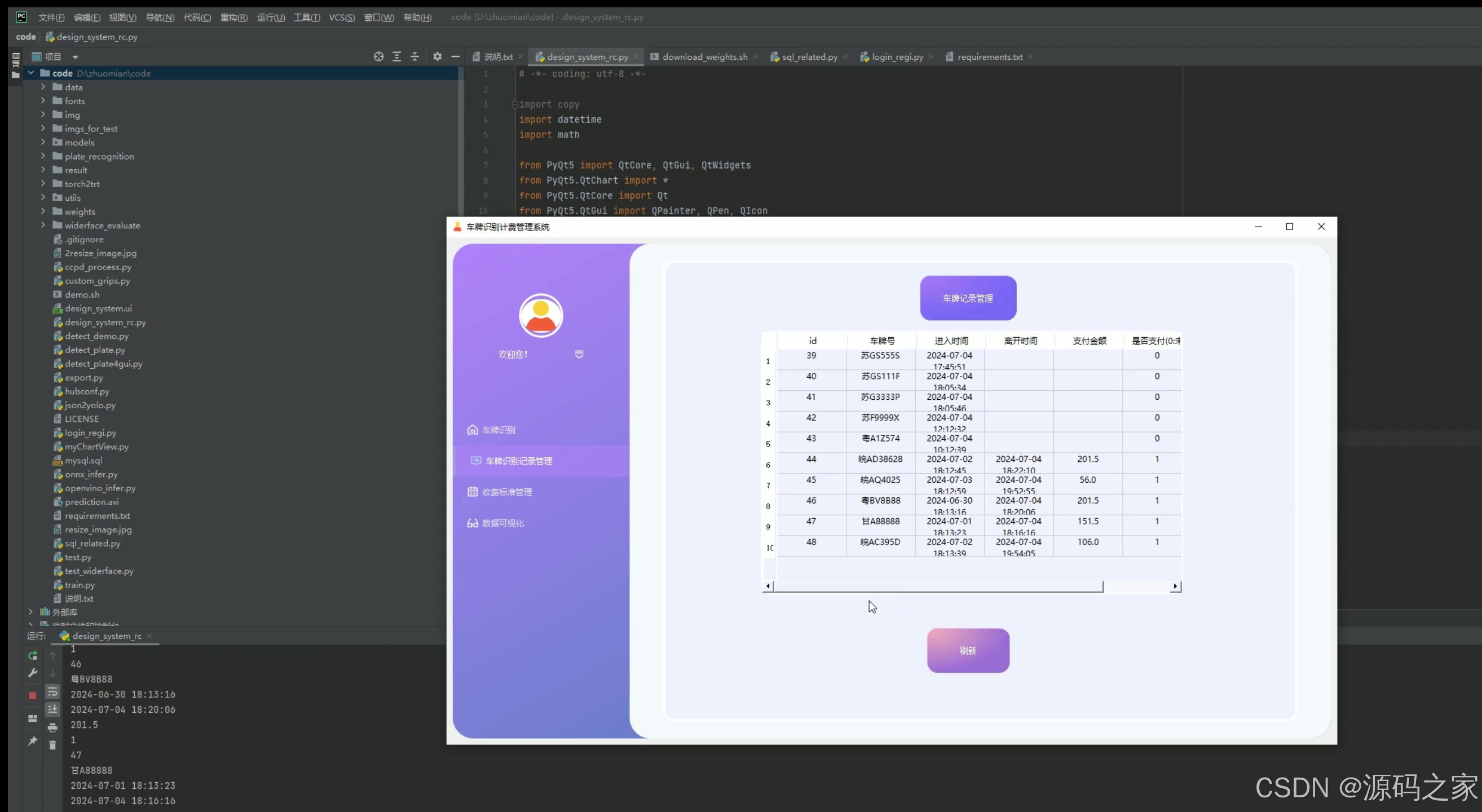
(4)识别记录数据管理
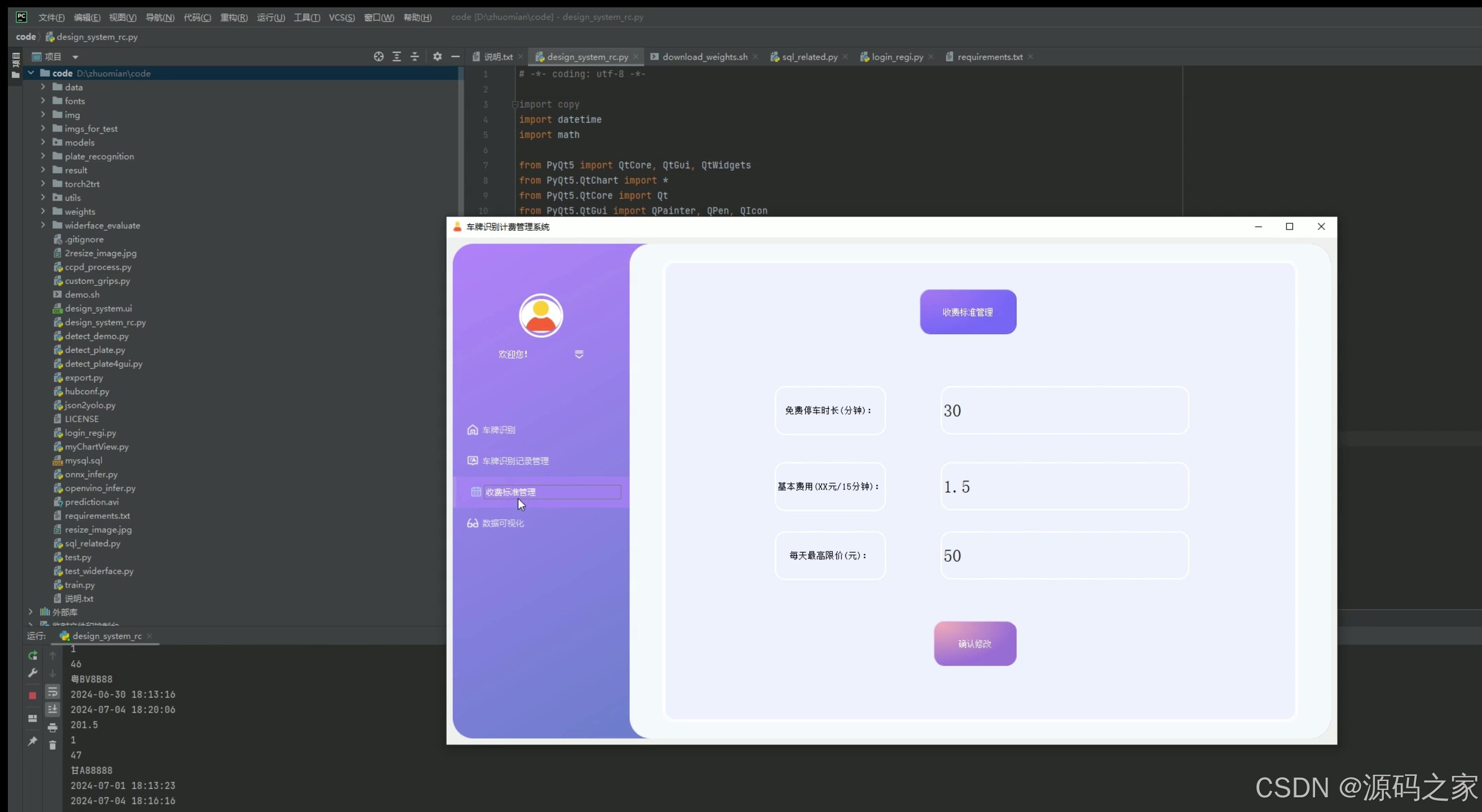
(5)停车计费标准设置管理
(6)视频检测识别—入库、出库
(7)摄像头实时检测识别–入库、出库
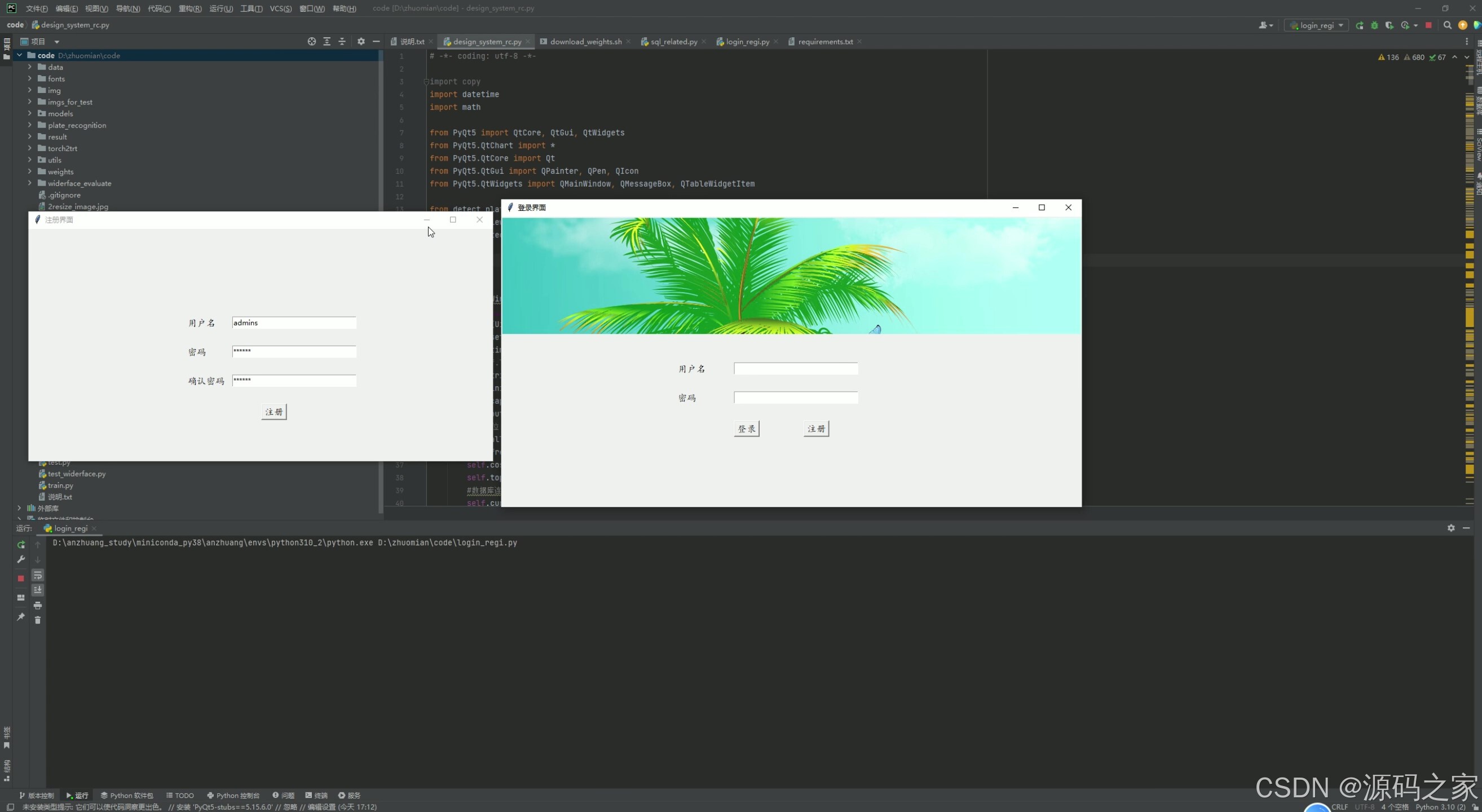
(8)注册登录
3、项目说明
1. 出库——车牌识别计费
- 功能描述:当车辆离开停车场时,系统通过车牌识别技术自动检测车牌号码,并根据车辆的入场时间和停车计费标准计算停车费用。
- 技术实现:使用YOLOv5或CRNN卷积神经网络进行车牌识别,结合MySQL数据库查询车辆的入场时间,通过Python计算停车费用,并通过PyQt5界面显示计费结果。
2. 入库——车牌识别
- 功能描述:当车辆进入停车场时,系统自动识别车牌号码,并记录入场时间。
- 技术实现:利用YOLOv5或CRNN进行车牌识别,将车牌号码和入场时间存储到MySQL数据库中,同时通过PyQt5界面显示车牌识别结果。
3. 数据分析可视化——停车数据、收费统计数据、饼图、折线图
- 功能描述:对停车场的停车数据和收费数据进行统计分析,并通过可视化图表(如饼图、折线图)展示。
- 技术实现:从MySQL数据库中提取停车数据和收费数据,使用Python的matplotlib库绘制饼图和折线图,通过PyQt5界面展示可视化结果。
4. 识别记录数据管理
- 功能描述:管理车牌识别记录,包括查看、搜索、删除等操作。
- 技术实现:通过PyQt5界面展示车牌识别记录,使用MySQL数据库进行数据存储和管理,支持查询、删除等操作。
5. 停车计费标准设置管理
- 功能描述:设置和管理停车场的停车计费标准,例如按小时计费、按天计费等。
- 技术实现:通过PyQt5界面提供计费标准设置功能,将计费标准存储到MySQL数据库中,方便后续计费计算时调用。
6. 视频检测识别——入库、出库
- 功能描述:通过视频流检测车辆的入库和出库,自动识别车牌号码。
- 技术实现:使用OpenCV读取视频流,结合YOLOv5或CRNN进行车牌识别,将识别结果和时间记录到MySQL数据库中。
7. 摄像头实时检测识别——入库、出库
- 功能描述:通过实时摄像头检测车辆的入库和出库,自动识别车牌号码。
- 技术实现:连接摄像头设备,使用OpenCV获取实时视频流,结合YOLOv5或CRNN进行车牌识别,将结果实时显示在PyQt5界面上。
8. 注册登录
- 功能描述:提供用户注册和登录功能,确保系统的安全性。
- 技术实现:使用PyQt5设计注册和登录界面,通过MySQL数据库存储用户信息,实现用户身份验证。
系统架构分为四层:用户界面层、应用程序层、业务逻辑层、数据存储层。用户界面层使用PyQt5构建,提供响应式设计和现代化界面,增强用户体验。用户通过界面上传图片、视频或连接摄像头,界面层负责展示识别结果和接收用户输入。应用程序层基于Python脚本,处理图像预处理、车牌定位、字符分割与识别的流程,调用OpenCV与HyperLPR库。业务逻辑层包含核心业务处理逻辑,负责数据验证、用户认证和权限管理。数据存储层采用MySQL数据库,通过sqlite3进行连接和操作,存储车牌识别记录与用户信息,支持高效查询。
系统支持图片、视频、摄像头三通道输入,可调置信度阈值;识别结果可一键导出CSV,方便停车场管理与企业安全审计。整体代码开源、环境一键配置,是“零代码”实现车牌识别计费的示范性工程。
4、核心代码
# -*- coding: UTF-8 -*-
import argparse
import time
from pathlib import Path
import os
import cv2
import torch
import torch.backends.cudnn as cudnn
from numpy import random
import copy
import numpy as np
from models.experimental import attempt_load
from utils.datasets import letterbox
from utils.general import check_img_size, non_max_suppression_face, apply_classifier, scale_coords, xyxy2xywh, \strip_optimizer, set_logging, increment_path
from utils.plots import plot_one_box
from utils.torch_utils import select_device, load_classifier, time_synchronized
from utils.cv_puttext import cv2ImgAddText
from plate_recognition.plate_rec import get_plate_result,allFilePath,init_model,cv_imread
# from plate_recognition.plate_cls import cv_imread
from plate_recognition.double_plate_split_merge import get_split_mergeclors = [(255,0,0),(0,255,0),(0,0,255),(255,255,0),(0,255,255)]
danger=['危','险']
def order_points(pts): #四个点按照左上 右上 右下 左下排列rect = np.zeros((4, 2), dtype = "float32")s = pts.sum(axis = 1)rect[0] = pts[np.argmin(s)]rect[2] = pts[np.argmax(s)]diff = np.diff(pts, axis = 1)rect[1] = pts[np.argmin(diff)]rect[3] = pts[np.argmax(diff)]return rectdef four_point_transform(image, pts): #透视变换得到车牌小图# rect = order_points(pts)rect = pts.astype('float32')(tl, tr, br, bl) = rectwidthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))maxWidth = max(int(widthA), int(widthB))heightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))maxHeight = max(int(heightA), int(heightB))dst = np.array([[0, 0],[maxWidth - 1, 0],[maxWidth - 1, maxHeight - 1],[0, maxHeight - 1]], dtype = "float32")M = cv2.getPerspectiveTransform(rect, dst)warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))return warpeddef load_model(weights, device): #加载检测模型model = attempt_load(weights, map_location=device) # load FP32 modelreturn modeldef scale_coords_landmarks(img1_shape, coords, img0_shape, ratio_pad=None): #返回到原图坐标# Rescale coords (xyxy) from img1_shape to img0_shapeif ratio_pad is None: # calculate from img0_shapegain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / newpad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh paddingelse:gain = ratio_pad[0][0]pad = ratio_pad[1]coords[:, [0, 2, 4, 6]] -= pad[0] # x paddingcoords[:, [1, 3, 5, 7]] -= pad[1] # y paddingcoords[:, :8] /= gain#clip_coords(coords, img0_shape)coords[:, 0].clamp_(0, img0_shape[1]) # x1coords[:, 1].clamp_(0, img0_shape[0]) # y1coords[:, 2].clamp_(0, img0_shape[1]) # x2coords[:, 3].clamp_(0, img0_shape[0]) # y2coords[:, 4].clamp_(0, img0_shape[1]) # x3coords[:, 5].clamp_(0, img0_shape[0]) # y3coords[:, 6].clamp_(0, img0_shape[1]) # x4coords[:, 7].clamp_(0, img0_shape[0]) # y4# coords[:, 8].clamp_(0, img0_shape[1]) # x5# coords[:, 9].clamp_(0, img0_shape[0]) # y5return coordsdef get_plate_rec_landmark(img, xyxy, conf, landmarks, class_num,device,plate_rec_model,is_color=False): #获取车牌坐标以及四个角点坐标并获取车牌号h,w,c = img.shaperesult_dict={}tl = 1 or round(0.002 * (h + w) / 2) + 1 # line/font thicknessx1 = int(xyxy[0])y1 = int(xyxy[1])x2 = int(xyxy[2])y2 = int(xyxy[3])height=y2-y1landmarks_np=np.zeros((4,2))rect=[x1,y1,x2,y2]for i in range(4):point_x = int(landmarks[2 * i])point_y = int(landmarks[2 * i + 1])landmarks_np[i]=np.array([point_x,point_y])class_label= int(class_num) #车牌的的类型0代表单牌,1代表双层车牌roi_img = four_point_transform(img,landmarks_np) #透视变换得到车牌小图if class_label: #判断是否是双层车牌,是双牌的话进行分割后然后拼接roi_img=get_split_merge(roi_img)if not is_color:plate_number,rec_prob = get_plate_result(roi_img,device,plate_rec_model,is_color=is_color) #对车牌小图进行识别else:plate_number,rec_prob,plate_color,color_conf=get_plate_result(roi_img,device,plate_rec_model,is_color=is_color) # cv2.imwrite("roi.jpg",roi_img)result_dict['rect']=rect #车牌roi区域result_dict['detect_conf']=conf #检测区域得分result_dict['landmarks']=landmarks_np.tolist() #车牌角点坐标result_dict['plate_no']=plate_number #车牌号result_dict['rec_conf']=rec_prob #每个字符的概率result_dict['roi_height']=roi_img.shape[0] #车牌高度result_dict['plate_color']=""if is_color:result_dict['plate_color']=plate_color #车牌颜色result_dict['color_conf']=color_conf #颜色得分result_dict['plate_type']=class_label #单双层 0单层 1双层return result_dictdef detect_Recognition_plate(model, orgimg, device,plate_rec_model,img_size,is_color=False):#获取车牌信息# Load model# img_size = opt_img_sizeconf_thres = 0.3 #得分阈值iou_thres = 0.5 #nms的iou值 dict_list=[]# orgimg = cv2.imread(image_path) # BGRimg0 = copy.deepcopy(orgimg)assert orgimg is not None, 'Image Not Found ' h0, w0 = orgimg.shape[:2] # orig hwr = img_size / max(h0, w0) # resize image to img_sizeif r != 1: # always resize down, only resize up if training with augmentationinterp = cv2.INTER_AREA if r < 1 else cv2.INTER_LINEARimg0 = cv2.resize(img0, (int(w0 * r), int(h0 * r)), interpolation=interp)imgsz = check_img_size(img_size, s=model.stride.max()) # check img_size img = letterbox(img0, new_shape=imgsz)[0] #检测前处理,图片长宽变为32倍数,比如变为640X640# img =process_data(img0)# Convertimg = img[:, :, ::-1].transpose(2, 0, 1).copy() # BGR to RGB, to 3x416x416 图片的BGR排列转为RGB,然后将图片的H,W,C排列变为C,H,W排列# Run inferencet0 = time.time()img = torch.from_numpy(img).to(device)img = img.float() # uint8 to fp16/32img /= 255.0 # 0 - 255 to 0.0 - 1.0if img.ndimension() == 3:img = img.unsqueeze(0)# Inference# t1 = time_synchronized()/pred = model(img)[0]# t2=time_synchronized()# print(f"infer time is {(t2-t1)*1000} ms")# Apply NMSpred = non_max_suppression_face(pred, conf_thres, iou_thres)# print('img.shape: ', img.shape)# print('orgimg.shape: ', orgimg.shape)# Process detectionsfor i, det in enumerate(pred): # detections per imageif len(det):# Rescale boxes from img_size to im0 sizedet[:, :4] = scale_coords(img.shape[2:], det[:, :4], orgimg.shape).round()# Print resultsfor c in det[:, -1].unique():n = (det[:, -1] == c).sum() # detections per classdet[:, 5:13] = scale_coords_landmarks(img.shape[2:], det[:, 5:13], orgimg.shape).round()for j in range(det.size()[0]):xyxy = det[j, :4].view(-1).tolist()conf = det[j, 4].cpu().numpy()landmarks = det[j, 5:13].view(-1).tolist()class_num = det[j, 13].cpu().numpy()result_dict = get_plate_rec_landmark(orgimg, xyxy, conf, landmarks, class_num,device,plate_rec_model,is_color=is_color)dict_list.append(result_dict)return dict_list# cv2.imwrite('result.jpg', orgimg)def draw_result(orgimg,dict_list,is_color=False): # 车牌结果画出来result_str =""for result in dict_list:rect_area = result['rect']x,y,w,h = rect_area[0],rect_area[1],rect_area[2]-rect_area[0],rect_area[3]-rect_area[1]padding_w = 0.05*wpadding_h = 0.11*hrect_area[0]=max(0,int(x-padding_w))rect_area[1]=max(0,int(y-padding_h))rect_area[2]=min(orgimg.shape[1],int(rect_area[2]+padding_w))rect_area[3]=min(orgimg.shape[0],int(rect_area[3]+padding_h))height_area = result['roi_height']landmarks=result['landmarks']result_p = result['plate_no']if result['plate_type']==0:#单层result_p+=" "+result['plate_color']else: #双层result_p+=" "+result['plate_color']+"双层"result_str+=result_p+" "for i in range(4): #关键点cv2.circle(orgimg, (int(landmarks[i][0]), int(landmarks[i][1])), 5, clors[i], -1)cv2.rectangle(orgimg,(rect_area[0],rect_area[1]),(rect_area[2],rect_area[3]),(0,0,255),2) #画框labelSize = cv2.getTextSize(result_p,cv2.FONT_HERSHEY_SIMPLEX,0.5,1) #获得字体的大小if rect_area[0]+labelSize[0][0]>orgimg.shape[1]: #防止显示的文字越界rect_area[0]=int(orgimg.shape[1]-labelSize[0][0])orgimg=cv2.rectangle(orgimg,(rect_area[0],int(rect_area[1]-round(1.6*labelSize[0][1]))),(int(rect_area[0]+round(1.2*labelSize[0][0])),rect_area[1]+labelSize[1]),(255,255,255),cv2.FILLED)#画文字框,背景白色if len(result)>=1:orgimg=cv2ImgAddText(orgimg,result_p,rect_area[0],int(rect_area[1]-round(1.6*labelSize[0][1])),(0,0,0),21)# orgimg=cv2ImgAddText(orgimg,result_p,rect_area[0]-height_area,rect_area[1]-height_area-10,(0,255,0),height_area)print(result_str)return orgimgdef get_second(capture):if capture.isOpened():rate = capture.get(5) # 帧速率FrameNumber = capture.get(7) # 视频文件的帧数duration = FrameNumber/rate # 帧速率/视频总帧数 是时间,除以60之后单位是分钟return int(rate),int(FrameNumber),int(duration) if __name__ == '__main__':parser = argparse.ArgumentParser()parser.add_argument('--detect_model', nargs='+', type=str, default='weights/plate_detect.pt', help='model.pt path(s)') #检测模型parser.add_argument('--rec_model', type=str, default='weights/plate_rec_color.pth', help='model.pt path(s)')#车牌识别+颜色识别模型parser.add_argument('--is_color',type=bool,default=True,help='plate color') #是否识别颜色parser.add_argument('--image_path', type=str, default='F:\\pesonal_file\\projuect_for_sale\\ALPR-master\\save', help='source') #图片路径parser.add_argument('--img_size', type=int, default=640, help='inference size (pixels)') #网络输入图片大小parser.add_argument('--output', type=str, default='result', help='source') #图片结果保存的位置parser.add_argument('--video', type=str, default='F:\\pesonal_file\\projuect_for_sale\\ALPR-master\\save\\test.mp4', help='source') #视频的路径device = torch.device("cuda" if torch.cuda.is_available() else "cpu") #使用gpu还是cpu进行识别# device =torch.device("cpu")opt = parser.parse_args()print(opt)save_path = opt.output count=0if not os.path.exists(save_path): os.mkdir(save_path)detect_model = load_model(opt.detect_model, device) #初始化检测模型plate_rec_model=init_model(device,opt.rec_model,is_color=opt.is_color) #初始化识别模型#算参数量total = sum(p.numel() for p in detect_model.parameters())total_1 = sum(p.numel() for p in plate_rec_model.parameters())print("detect params: %.2fM,rec params: %.2fM" % (total/1e6,total_1/1e6))# plate_color_model =init_color_model(opt.color_model,device)time_all = 0time_begin=time.time()if not opt.video: #处理图片if not os.path.isfile(opt.image_path): #目录file_list=[]allFilePath(opt.image_path,file_list) #将这个目录下的所有图片文件路径读取到file_list里面for img_path in file_list: #遍历图片文件print(count,img_path,end=" ")time_b = time.time() #开始时间img =cv_imread(img_path) #opencv 读取图片if img is None: continueif img.shape[-1]==4: #图片如果是4个通道的,将其转为3个通道img=cv2.cvtColor(img,cv2.COLOR_BGRA2BGR)# detect_one(model,img_path,device)dict_list=detect_Recognition_plate(detect_model, img, device,plate_rec_model,opt.img_size,is_color=opt.is_color)#检测以及识别车牌ori_img=draw_result(img,dict_list) #将结果画在图上img_name = os.path.basename(img_path) save_img_path = os.path.join(save_path,img_name) #图片保存的路径time_e=time.time()time_gap = time_e-time_b #计算单个图片识别耗时if count:time_all+=time_gap cv2.imwrite(save_img_path,ori_img) #opencv将识别的图片保存count+=1print(f"sumTime time is {time.time()-time_begin} s, average pic time is {time_all/(len(file_list)-1)}")else: #单个图片print(count,opt.image_path,end=" ")img =cv_imread(opt.image_path)if img.shape[-1]==4:img=cv2.cvtColor(img,cv2.COLOR_BGRA2BGR)# detect_one(model,img_path,device)dict_list=detect_Recognition_plate(detect_model, img, device,plate_rec_model,opt.img_size,is_color=opt.is_color)ori_img=draw_result(img,dict_list)img_name = os.path.basename(opt.image_path)save_img_path = os.path.join(save_path, img_name)cv2.imwrite(save_img_path,ori_img) else: #处理视频video_name = opt.videocapture=cv2.VideoCapture(video_name)fourcc = cv2.VideoWriter_fourcc(*'mp4v')fps = capture.get(cv2.CAP_PROP_FPS) # 帧数width, height = int(capture.get(cv2.CAP_PROP_FRAME_WIDTH)), int(capture.get(cv2.CAP_PROP_FRAME_HEIGHT)) # 宽高out = cv2.VideoWriter('result.mp4', fourcc, fps, (width, height)) # 写入视频frame_count = 0fps_all=0rate,FrameNumber,duration=get_second(capture)if capture.isOpened():while True:t1 = cv2.getTickCount()frame_count+=1print(f"第{frame_count} 帧",end=" ")ret,img=capture.read()if not ret:break# if frame_count%rate==0:img0 = copy.deepcopy(img)dict_list=detect_Recognition_plate(detect_model, img, device,plate_rec_model,opt.img_size,is_color=opt.is_color) # 这个就是需要的结果了 # TODOori_img=draw_result(img,dict_list)t2 =cv2.getTickCount()infer_time =(t2-t1)/cv2.getTickFrequency()fps=1.0/infer_timefps_all+=fpsstr_fps = f'fps:{fps:.4f}'cv2.putText(ori_img,str_fps,(20,20),cv2.FONT_HERSHEY_SIMPLEX,1,(0,255,0),2)# cv2.imshow("haha",ori_img)# cv2.waitKey(1)out.write(ori_img)else:print("失败")capture.release()out.release()cv2.destroyAllWindows()print(f"all frame is {frame_count},average fps is {fps_all/frame_count} fps")
🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目编程以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
5、源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查看👇🏻获取联系方式👇🏻