HDR简介
一、DR
DR动态范围(Dynamic Range)指系统能够捕捉和再现的最强与最弱信号之间的比值,在数字成像和医学影像中表现为从最暗到最亮区域的细节保留能力,通常以分贝(dB)、比特(bit)或档(stops)表示。
动态范围(DR)的计算存在两种方式,主要源于应用场景和测量目的的差异,两种计算方式的核心区别在于:
- 理论计算侧重传感器硬件性能指标,
- 实际计算侧重实际成像效果。
1.1 理论动态范围的计算
基于传感器参数的理论计算以位深(如8位、10位)为基础,通过公式 DR = log2(Lmax/Lmin)计算。这种计算方式不考虑噪声干扰,仅反映传感器理论上的最大亮度与最小亮度的比值。 其中Lmax和Lmin分别代表最大与最小可分辨光强。在摄影领域,DR被称为“宽容度”,决定图像中高光与阴影细节的保留程度。
以8比特为例,每个颜色通道(如红、绿、蓝)可表示256个亮度等级(0-255),此时理论动态范围为8档(log₂(256))。若采用16比特量化,则动态范围提升至16档。
1.2 实际动态范围的计算
实际成像时,传感器性能和光照条件会影响动态范围。例如低光照环境下噪声会导致最亮有效亮度与最暗有效亮度比值降低,此时DR值会低于理论值。
实际测量需考虑噪声影响,计算公式为 DR = 20×log₁₀(Lₘₐₕ/Lₘₙ),其中Lₘₐₕ为未过曝的最大亮度值,Lₘₙ为扣除噪声后的最小有效亮度值。这种计算方式通过排除噪声干扰,反映传感器实际可记录的亮度范围。
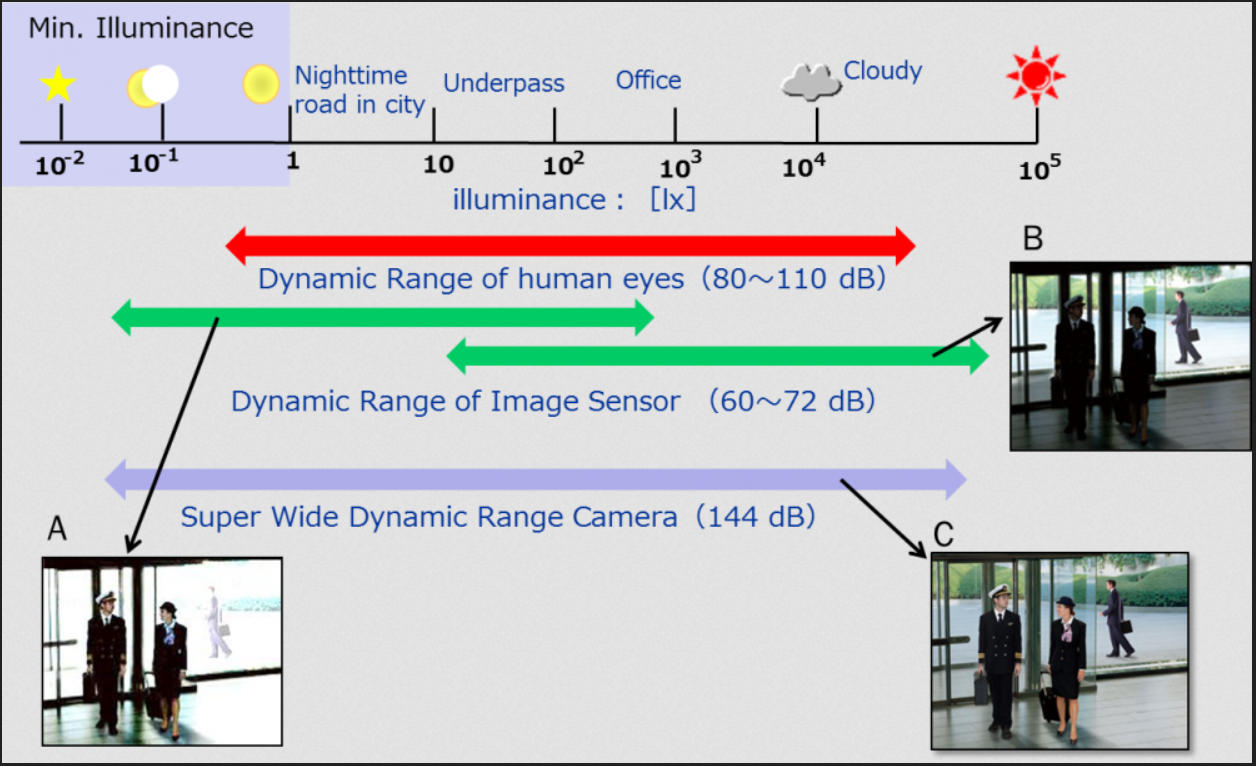
sensor 动态范围越大,所能表现的层次越丰富,所包含的色彩空间也越广。在日常生活中会经常遇到动态范围>100dB的场景,一个sensor如果具备120dB的动态范围即可满足绝大部分场景的拍摄需求。普通人眼可轻易应对80~100dB的场景,然而普通的CMOS sensor 却只能提供50~70dB的动态范围,更高的动态范围一般需要通过多帧合成的办法实现。
在摄影领域经常使用“f-stop”术语描述镜头的通光量,这里stop指曝光档位,镜头光圈旋转到一个f-stop档位的时候会自动锁定,伴随一个轻微的“咔嚓”声。档位的设定依据是非常明确的,即相邻两档的通光量是2倍关系,因此镜头的通光量是按照2的指数倍规律变化的。在摄影领域经常使用“light stop”术语描述场景的动态范围。举例来说,如果室内最暗处照度是1lux,而室外最亮处照度是3万lux,则场景动态范围 = 20×log₁₀(30000) ≈ 90dB,需要15(log₂(30000)≈15)个light stop。
二、HDR
高动态范围成像(High Dynamic Range Imaging,简称HDRI或HDR),在计算机图形学与电影摄影术中,是用来实现比普通数位图像技术更大曝光动态范围(即更大的明暗差别)的一组技术。高动态范围成像的目的就是要正确地表示真实世界中从太阳光直射到最暗的阴影这样大的范围亮度。
普通相机(甚至是手机相机)在同一张照片中很难同时精确地展现出极亮和极暗的细节。换句话说,当我们拍摄一张照片时,常常会发现照片的某些部分过曝(例如天空过亮,细节丢失),而另一些部分又可能是欠曝的(例如阴影部分的细节无法清晰呈现)。
HDR 模式的出现正是为了解决这个问题。它通过将不同曝光度的多张照片合成在一起,保留更多亮部和暗部的细节,从而实现更加丰富和真实的图像效果。HDR 模式能够将图像的亮度范围扩展,从而模拟出更接近人眼感知的视觉效果。
曝光三要素:光圈、快门、ISO。
2.1 光圈
光圈主要负责控制进入相机的光线量。光圈越大,单位时间内进入的光线就越多,照片的亮度也就越高。反之,光圈越小,进入的光线量就越少,照片的亮度则相应降低。
2.2 快门
快门负责控制曝光时间。快门速度越快,曝光时间就越短,进入相机的光线量也就越少。相反,快门速度越慢,曝光时间就越长,进入的光线量则越多。
2.3 ISO
ISO也是影响曝光效果的重要因素。ISO越高,相机对光线的敏感度就越高,即使在光线较暗的环境下也能拍摄出明亮的照片。然而,过高的ISO也可能导致照片出现噪点,影响画质。
2.4 EV
快门速度、光圈(F值)和ISO共同决定曝光量。曝光量 = T(时间)× F²(光圈平方)× ISO。当快门速度、光圈的平方、ISO三者乘积相同时,画面的亮度相同。这一规律被称为等值曝光原理,其核心在于三者组合形成的曝光量恒定。
对于同一环境,当快门速度、光圈的平方、ISO三者乘积相同时,画面的亮度相同,且这三者乘积翻倍时,称为“增加一档曝光”,即+1EV。例如同一环境中,乘积为4相对乘积等于1为+2EV。摄环境的时候,如果照片过暗,要增加EV值,如果照片过亮,要减小EV值。相对于所谓”正确曝光“的照片,曝光补偿若为正值则过曝,若为负值则欠曝,并以EV值为单位计算。
EV值(Exposure Value)是描述绝对照度的摄影用单位,与照度Lux是一一对应的,有以下关系:
![]()
EV = log₂(F²/T)-log₂(ISO/100)。
对于所谓”正常曝光“的照片,在iso为100时,EV=log₂(F²/T)。
2.5 多帧HDR
多帧HDR是最普通的实现HDR的方法。优点是对CIS要求不高,所有CIS都可以实现时域HDR;缺点是若被摄物体移动较大,则会产生叠影。
当遇到明暗差距很大的场景时,手机的CIS面积小,仅依靠普通的单次曝光无法提供足够的动态范围,即要么高光过曝,要么暗部难以看清。因此拍摄多张照片,一部分提高曝光使照片的暗部可以看清,另一部分压低曝光使照片亮部可以看清,该过程称为包围曝光。将这样的照片叠加,即可得到暗部亮部均清晰的照片,从而变相提高动态范围。手机的夜景模式,就是一种较为暴力的HDR合成。

2.6 单帧HDR
2.6.1 BME-HDR(Binning Multiplexed Exposure)
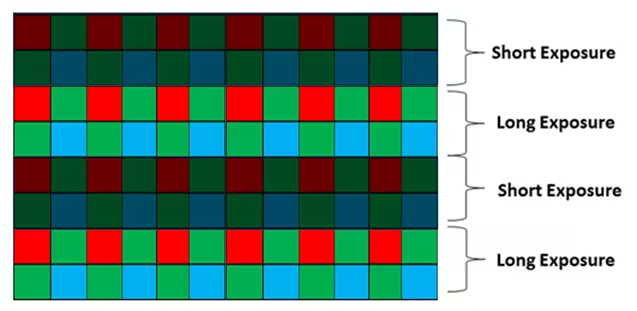
这种HDR方式将CIS上每两行为一组(因为Bayer排列的RGGB需要占用两行),分别进行长、短曝光。长曝光获得暗部细节,短曝光获得亮部细节,将相邻两组的图像合并即可获得更高的动态范围。缺点很显著,就是其分辨率会减半。
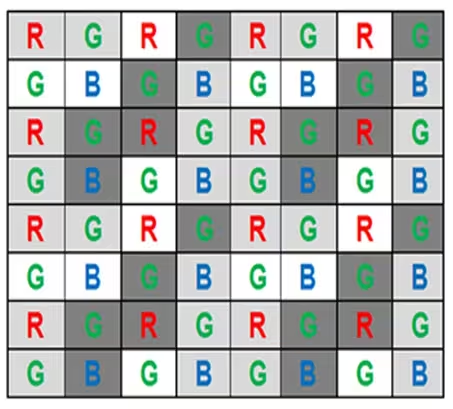
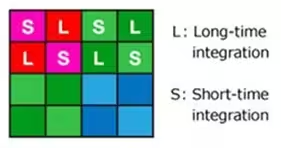
2.6.2 SME-HDR(Spatially Multiplexed Exposure)
这种方式在4x4的Bayer阵列中,对不同的像素采用不同的曝光,最终合成HDR图像。大约损失20%的图像质量。总体上还挺复杂的。
2.6.3 QBC-HDR(Quad Bayer Coding HDR)
这种方式与上一种类似,但结合了Quad Bayer排列使用,在4个同颜色滤光片下,两对角线的像素分别采用长短曝光,从而合成HDR图像。
2.6.4 双增益输出(Dual Gain Output,DGO)
这种方式需要结合双电路增益(双原生ISO)技术,两路不同原生ISO的图像同时输出并融合,从而提升图像的信噪比。这种方式主要应用于摄像机上,例如ARRI和Canon的部分摄像机等等。
DGO对于动态范围提升的幅度虽然不如前几种大,但仍然非常显著,并且对画质不会有什么负面的影响,除了功耗和成本略高一些就没什么缺点了。
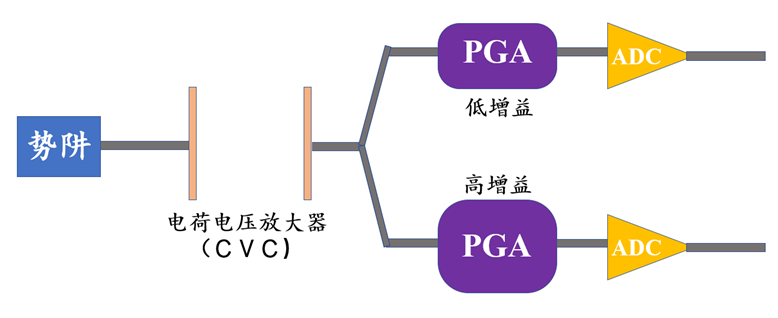
双原生ISO技术(Dual Gain Amplifier)
双原生ISO技术是指:电路中有两条电路,连接增益大小不同的PGA。
事实上,更准确地讲,该技术应称为双电路增益。