【无人机】ardupilot事项笔记
参考
遥控器校准 · copter
飞蛋AET-H743-BASIC使用Ardu... | 飞蛋科技文档中心
05. ArduPilot调参指南 | SpeedyBee 知识库 | 专业FPV穿越机视频教程与常见问题解答,最全新手FPV穿越机调参指南。
基础开始
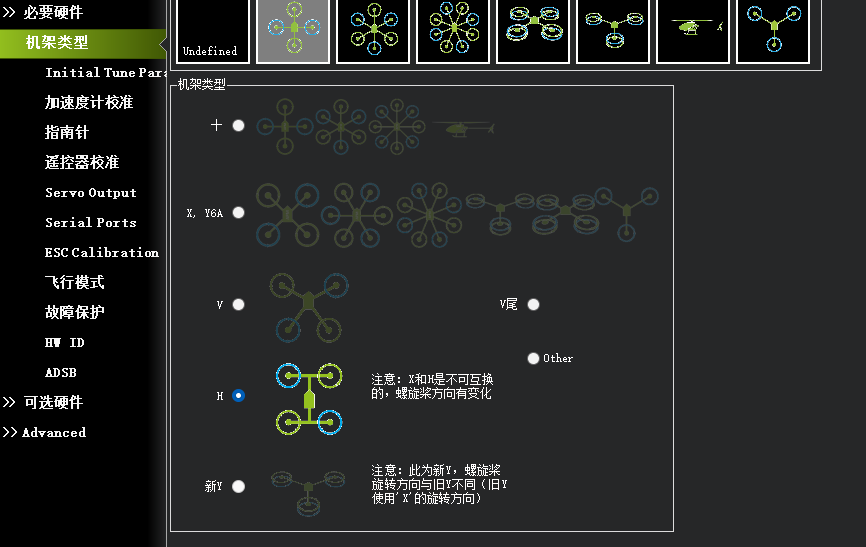
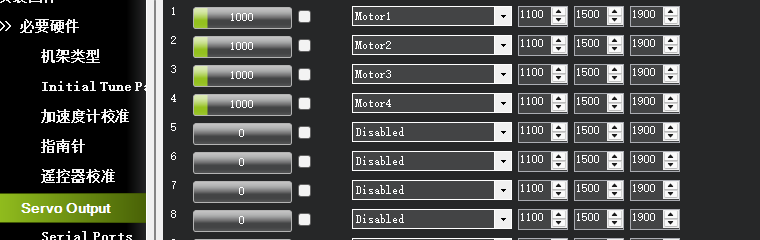
先选择机架类型,我的是H型,这里cw为顺时针(绿色),ccw为顺时针(蓝色)。选完servo output会出现这四个motor,没有就设置。
必要硬件->ESC calibration
pwmrange为电调用,pwmangle应该是舵机用。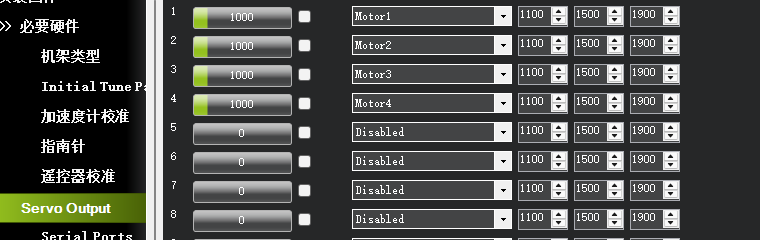
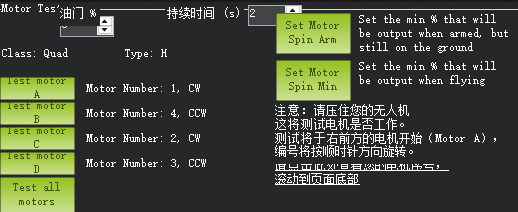
可选硬件->电机测试
这里用小油门测试方向,这里也有motor number,对应你的固件设定。(测试自己找也行)
ABCD为机头顺时针开始顺数。
初始配置
1.校准加速度计

Please place vehicle LEVEL加速计校准--底面朝下
Please place vehicle LEFT加速计校准--左面朝下
Please place vehicle RIGHT加速计校准--右面朝下
Please place vehicle NOSEDOWN加速计校准--前面朝下
Please place vehicle NOSEUP加速计校准--后面朝下
Please place vehicle BACK加速计校准--顶面朝下。校准完成

校准水平,可以在飞控装机后,飞机平放,然后执行一次校准水平即可。
如何设置飞控不同的安装方向——在Mission Planner地面站 | SpeedyBee 知识库 | 专业FPV穿越机视频教程与常见问题解答,最全新手FPV穿越机调参指南。
2.指南针(罗盘)设置
3.舵机电调自定义设置
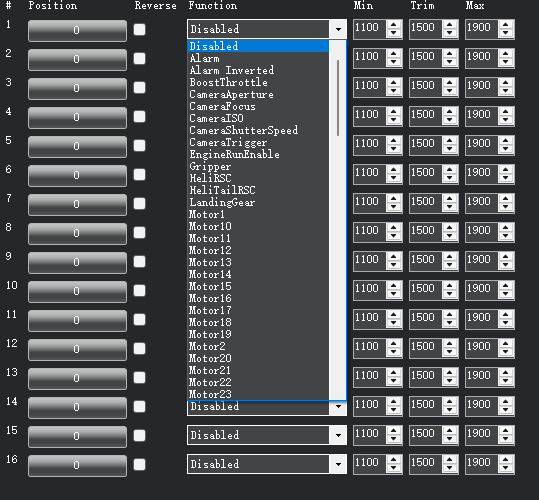
上图对应的#1即为飞控的S1,#2即为飞控的S2,以此类推。
默认参数为常规布局的AETR模式,如上图
Aileron 为副翼横滚舵机
Elevator为俯仰升降尾舵机
Throttle为电调油门信号
Rudder为垂直方向舵机
4.串口
elrs接收机
![]()
如果使用ELRS/CRSF接收机,此类接收机的参数一般为115200 RCIN。set bitmask一个都不用选择全部取消勾选即可,看到遥控没信号就用指南针那里的reboot。
飞控板载蓝牙数传模块设置
AET H743 Basic飞控板载蓝牙数传模块,直接对应UART7接口。
则该接口的参数选择 115200 Mavlink2
5.遥控校准
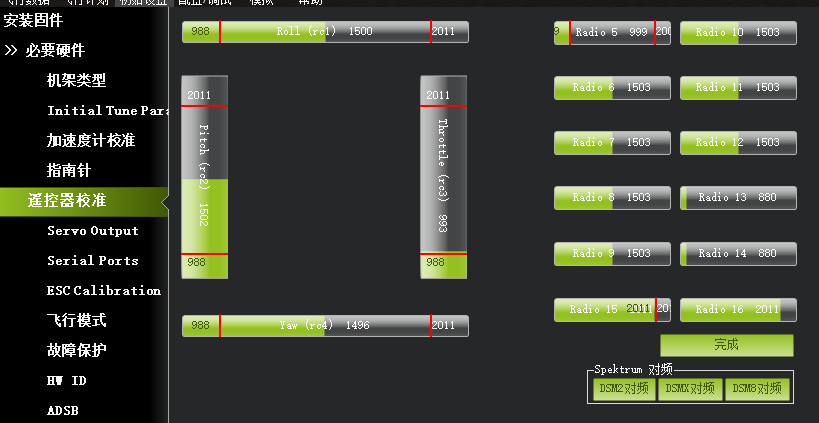
图中rc2还没反向
所有通道最大最小就行,看看前四个通道没问题主要,注意将所有通道的遥感打满,开关通道及6端开关通道打满,确保看到通道显示红色栏为通道输出的最大值及最小值。
建议勾选Pitch rc2 反转
| RC2_REVERSED这个参数给1就是反向 |
资料文献
ELRS 遥控器/高频头如何与接收机对频 | SpeedyBee 知识库 | 专业FPV穿越机视频教程与常见问题解答,最全新手FPV穿越机调参指南。
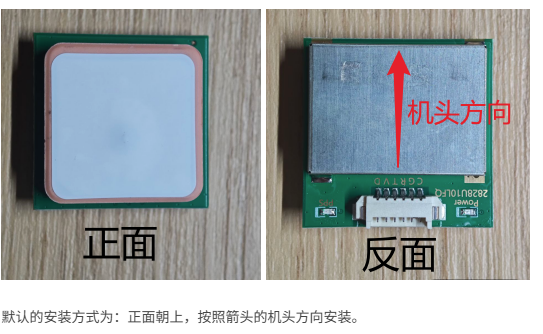
6.GPS罗盘(这个是我用的)
资料
AET-GNSS01 GNSS与罗盘模块 | 飞蛋科技文档中心
如何安装并设置罗盘-ArduPilot固件 | SpeedyBee 知识库 | 专业FPV穿越机视频教程与常见问题解答,最全新手FPV穿越机调参指南。
飞蛋AET-H743-BASIC使用Ardu... | 飞蛋科技文档中心
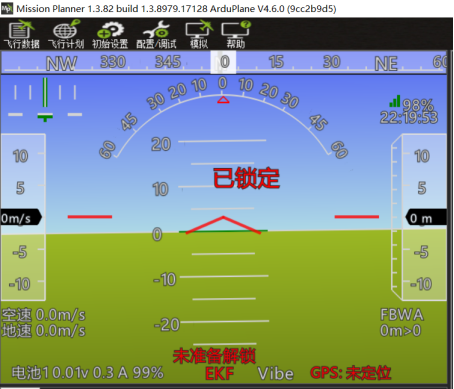
GPS连接正确,串口设置正确,工作正常,看到”GPS未定位“红色字样。
1.2.罗盘校准
点击进入指南针界面,GPS和罗盘安装详细请看说明书;
点击校准罗盘后,会在下方显示一个进度条。您需要将飞机沿各轴进行旋转,直到进度条完全填满。
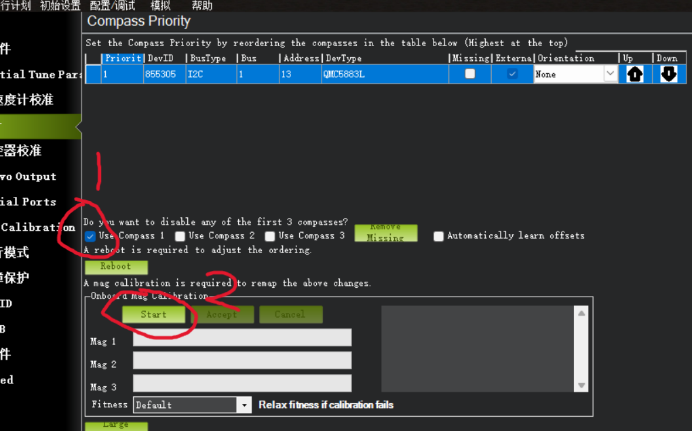
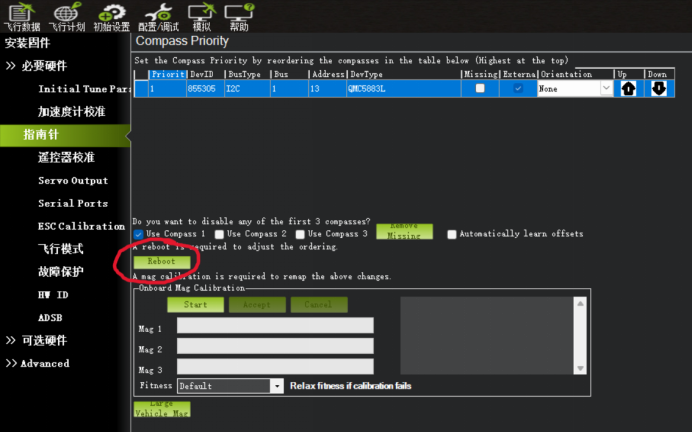
此时系统会提示罗盘校准完成,需要重新启动飞控。点击REBOOT,重启完成校准过程。(校准罗盘需在室外至少搜到8颗星的情况下进行)
进行垂起飞行请务必开启罗盘,并校准设置正确,否则多轴状态下飞机稳定性差,操作难度高,且有可能出现不必要的风险。
7.空速计(多旋翼不用)
安装好空速计的首飞设置
1.ARSPD_TYPE = 1 (修改保存并重连后其他参数才可见)
2.ARSPD_OPTIONS = 15 (勾选DisableVoltageCorrection)
3.ARSPD_AUTOCAL = 1
4.ARSPD_SKIP_CAL = 1
。。
空速计使用说明-飞蛋行业版本&FAPPLE空速计 | 飞蛋科技文档中心
全部参数配置调试
ArduPilot T尾布局固定翼调参指南 | SpeedyBee 知识库 | 专业FPV穿越机视频教程与常见问题解答,最全新手FPV穿越机调参指南。
飞蛋AET-H743-BASIC使用Ardu... | 飞蛋科技文档中心
其他参数更多是在“全部参数表”里面进行针对性设置,这是ardupilot固件最具有特点地方。
垂起设置
手动arm通道设置
注意一个通道给了多个功能会出问题且不会报错,一定要固定通道使用功能,改遥控器设置即可。
ARMING_RUDDER 0
二挡开关功能解锁,关闭摇杆解锁
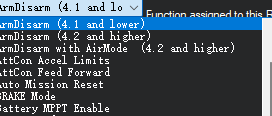
RC5_OPTION 153 (通道5,我的是二挡开关)
![]()
![]() 设置41这个armdisarm
设置41这个armdisarm
| 功能选项 (RCx_OPTION值) | 名称 (在MP中) | 工作逻辑 | 安全等级 | 适用场景 |
|---|---|---|---|---|
| 41 | Arm/Disarm | 开关式: - 高位(High): Arm (解锁) - 低位(Low): Disarm (上锁) | 高 | 最常用、最推荐。使用一个两段开关,明确无误。 |
| 43 | Arm Toggle | 切换式: - 每次从低位切换到高位时,状态翻转一次 (Arm<>Disarm)。 | 中 | 节省通道。常用于临时测试,飞行中不推荐,容易误操作。 |
| (无独立值) | With Arm Mode | 组合式: 此功能不能单独设置,需与飞行模式选项结合。它允许你在特定模式下才能解锁。 | 最高 | 高级安全策略。例如,设置只能在“自稳(Stabilize)”模式下解锁,防止在错误模式下意外解锁。 |
资料文献
如何设置解锁与上锁 | SpeedyBee 知识库 | 专业FPV穿越机视频教程与常见问题解答,最全新手FPV穿越机调参指南。
RTL通道
RC8_OPTION 4
二挡开关功能,返航功能
MODE功能通道
三挡开关
FLTMODE_CH 6通道6
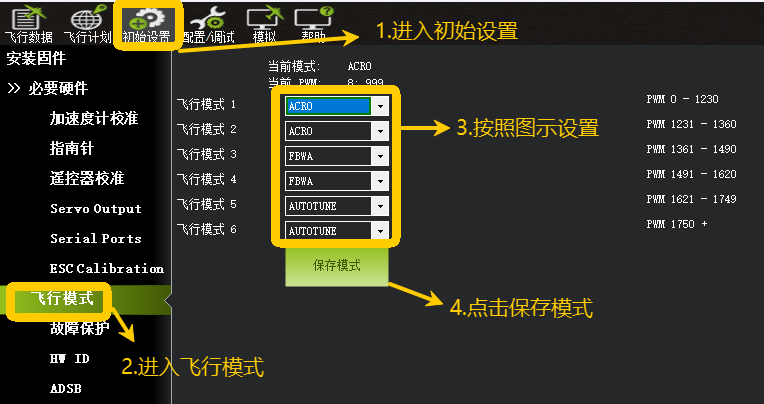
模式设置样例,三挡这样,模式自选。
资料文献
ArduPilot 飞行模式说明 | SpeedyBee 知识库 | 专业FPV穿越机视频教程与常见问题解答,最全新手FPV穿越机调参指南。
自检
Ardupilot固件对飞控解锁要求非常高,默认参数需要自检数十项参数后达标才允许解锁,加之我们飞机可能并未加装这么多外设及检查内容,所以我们可通过此参数,去掉一些飞控无法自检的选项。先搜索ARMING 找到ARMING_CHECK 1(此处会弹出对话框,根据实际情况关闭无法过检的参数即可, 例如我飞机没装储存卡,无法过自检,我们就需要将对话框中Logging Available取消勾选。 否则飞机是无法通过自检起飞的。)
点击选项的空地,出现set bitmask。选你要的和不要的。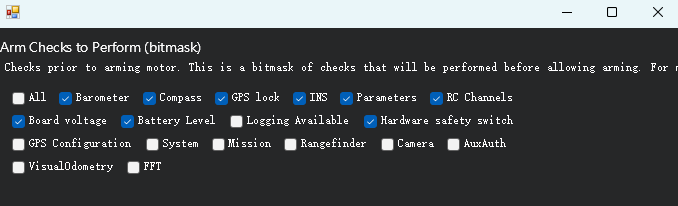
GPS罗盘设置
Compass 罗盘模块 4
Barometer 气压计模块 2
GPS Lock GPS定位锁定 8
RC Channels 遥控器通道信号输入 64
举例:若想希望飞控在GPS搜星定位完成,并确保飞控气压计无异常,可选择填入 10
(即8+2) ,写入保存即可。
GPS 设置UART2(对应serial2)接入GPS模块(不带罗盘)
SERIAL2_BAUD 38
SERIAL2_OPTIONS 0
SERIAL2_PROTOCOL 5
ARMING_RUDDER 2
飞机落地后,Yaw方向舵左打满6秒,飞控锁定,此时推油门电机不转。