陈童理论物理新讲1 哈密顿力学初步
本博客会默认读者有高中物理基础
势能与力
能量与力
我们通过势能(与位置有关的能量)来定义力:
力是势能关于位置的变化量。
哈密顿正则方程
我们重写牛顿运动定律:

左边的等式是牛顿运动定律。
对于动量的定义:粒子的速度与动量成正比与质量成反比

哈密顿正则方程的推导
由哈密顿正则方程我们可以证明能量守恒:(虽然能量守恒应该才是基本前提)

多系统推广此处略。
无磨损摩擦的一个物理模型
微分形式
微分形式
首先是给出坐标变换后二重积分的计算方法
这里说明一下雅可比矩阵:
- 这里的雅可比行列式可以看成两个二维向量叉乘的绝对值,数值上等于两个向量表示的平行四边形的面积
- 两个向量分别是原坐标单位向量变换后,在新坐标中的样子。如下图所示,紫色的两个点代表变换后的单位坐标。
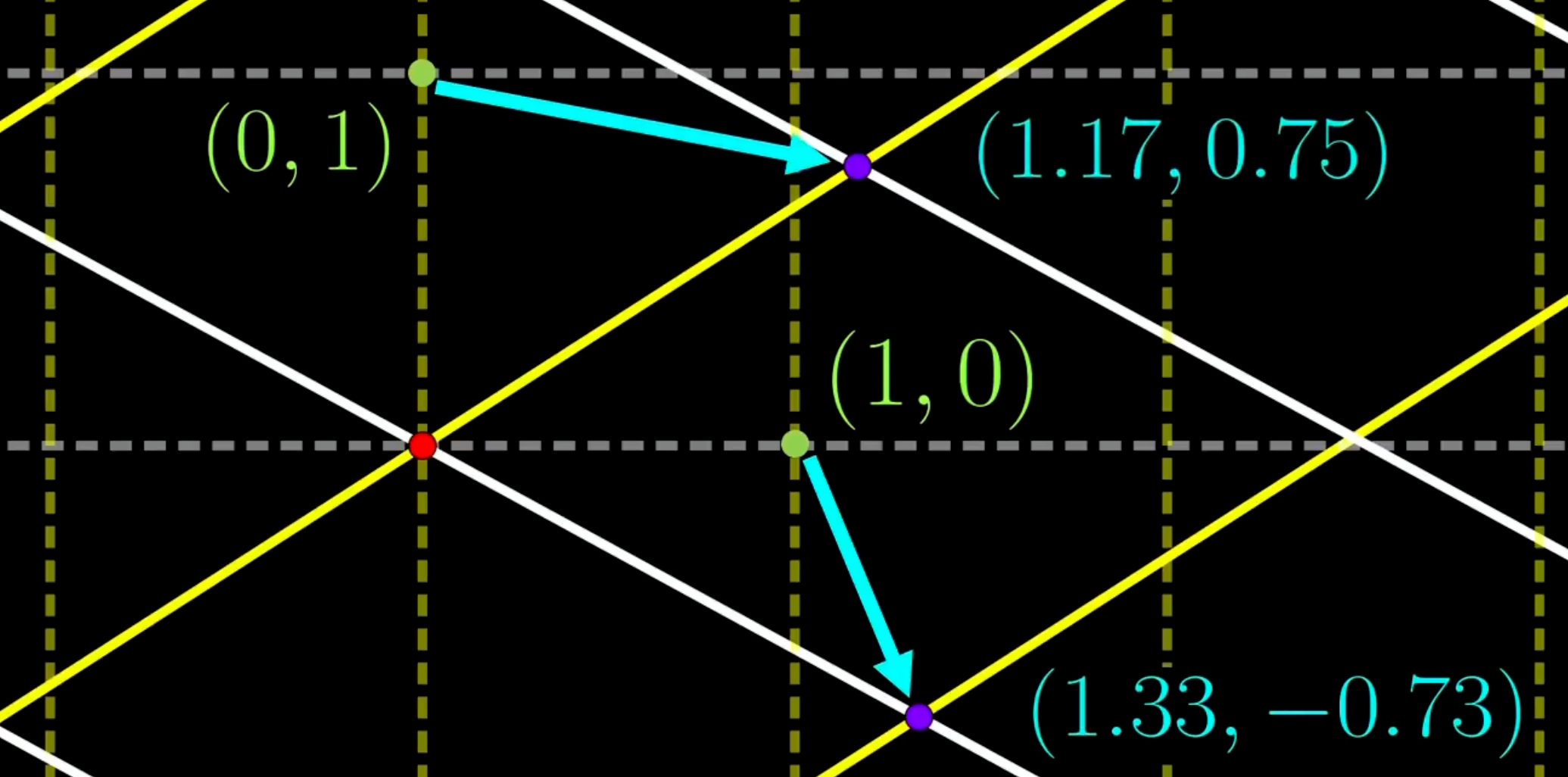
- 雅可比行列式为什么等于叉乘,可以线验证左边原点附近任意夹角的两个单位向量,而其他情况通过平移变成这种情况后,面积不变,由此可以证得。
- 而原单位坐标的面积为1,又有雅可比行列式计算出变换后的面积,因此雅可比矩阵可以表示变换后的面积比。
将以上结果推广到n重积分
我们给出一个这样的标记:


有了上面的n重形式,我们探讨对n个变量(维度)做k重积分的情况(比如在三维空间中做二重积分)

- 注意,k这里可以看成一个张量的维度,2时为一个矩阵,3时为矩阵的叠加。
- 这里是一个爱因斯坦求和约定,当标号同时存在上标和下标中则默认对齐求和,所以这里是省略了前面的k个连加符号(从1加到n)
这样则必然出现:
- k个指标取值必然要两两不同,否则为0。
- k要小于等于n
- 以2-形式继续考察,发现对微分有贡献的项只有反对称的项。

由上式得,当两个指标对称,则对微分无贡献。又由于任意实数可以这样分解:

则对微分有用的必然时反对称的部分(张量总任意两个维度对换,如ij)
而k个微分有k!种排列方式(在反对称的情况下是相等的),因此要除以k!。
三维的微分形式
三维空间的0-形式和三维空间的1-形式十分类似

接下来写1-形式和2-形式:
将1-形式的写法进行简化

同样对2-形式的写法进行简化
我们由两个简化的式子得到,1-形式和2-形式拥有对应的结构,这种现象称之为霍奇对偶
外微分与斯托克斯公式
散度与旋度
散度
衡量向量场在某一点的局部性质(是源还是汇)
- 源:流出比流入多,散度为正
- 汇:流入比流出多,散度为负
数学定义
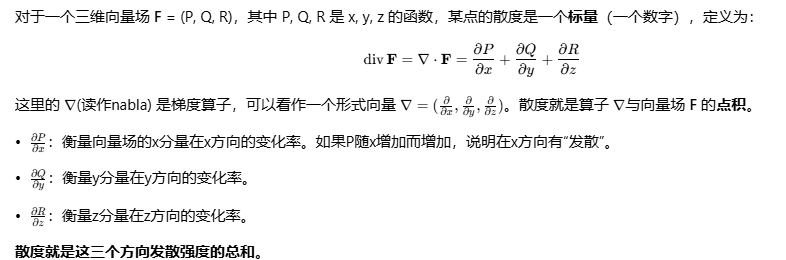
从定义可以看出,散度是有默认的正方向的。
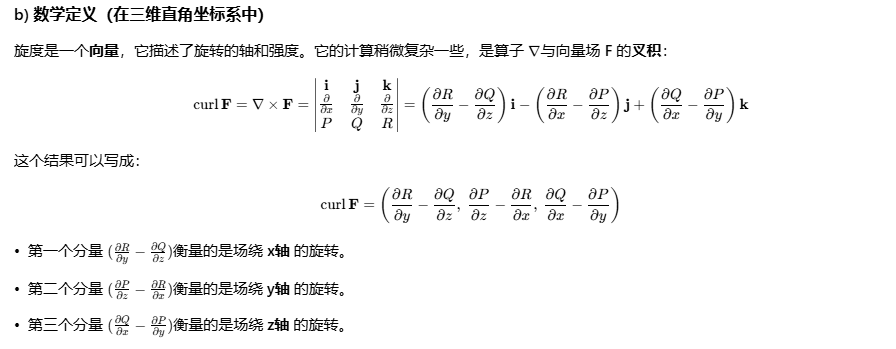
旋度
旋度是衡量向量场中某一点的旋转特性。这是一个矢量,其更加右手定则确定旋转方向。旋度的膜长用于衡量旋转的剧烈程度
数学定义:
外微分
我们定义一种运算,以二维空间举例
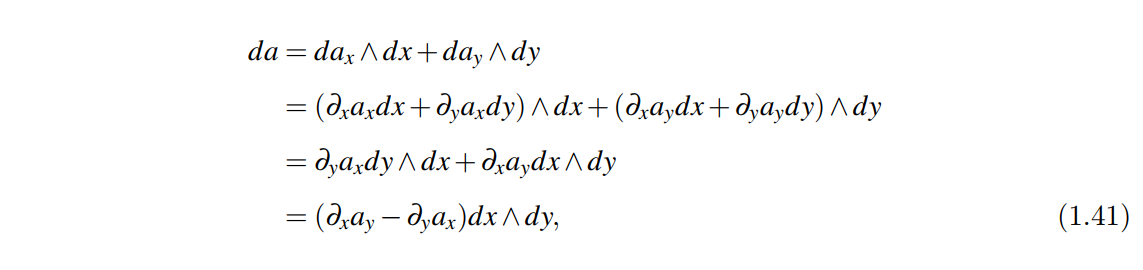
上述式子外积前的内容就是矢量a\mathbf{a}a的散度。
然后我们用外积分重写格林公式


然后我们来写三维空间1-形式微分的外积分
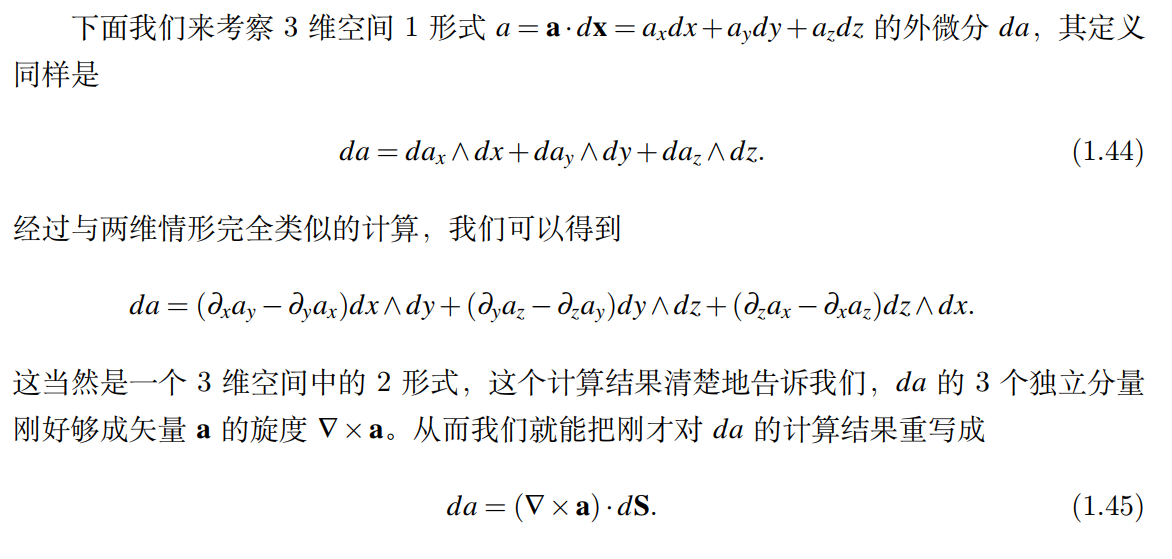
可以看到外积分自动给出了三维空间的旋度
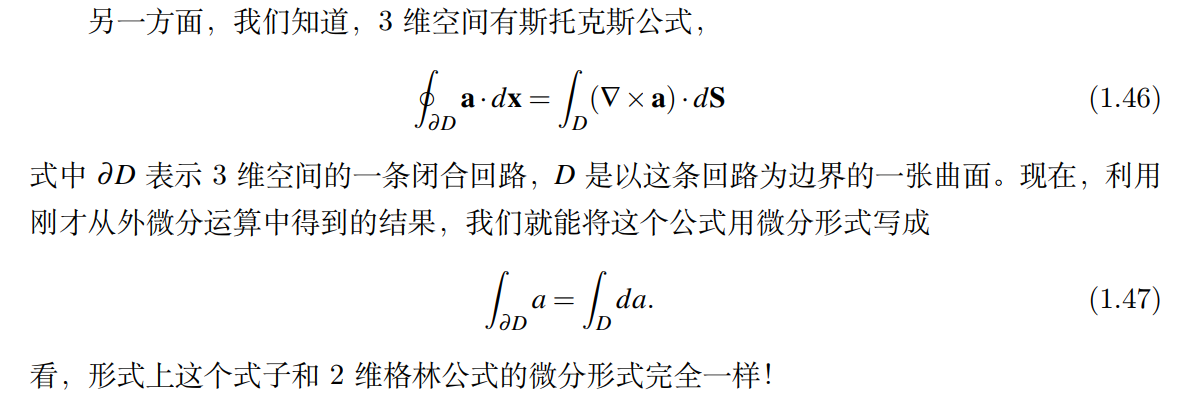
我们再利用这个外积分重写斯托克斯公式
继续推广外积分到三维空间的2-形式微分
我用这个公式重写高斯公式
由上述综合,我们得到了广义的斯托克斯公式
公式两边面的维数和微分的形式k是相等的
这里等于0是因为先对i求导再对j求导和先对j求导再对i求导是相等的(即没有相反的分量)
保守力的特性
我们将保守力换两种形式改写
由新学到的外微分有:
再通过外微分的形式将这个方程拆解开
特别的我们将1,2,3带入(也就是将一个粒子带入)得到保守力旋度为0

接下来我们探索保守力沿着闭合回路做功
注意这里的F是一个微分形式而不是力本身。这样写是为了符合斯托克斯公式的定义。
由于摩擦力沿闭合回路会将机械能转化为热能,做了负功,因此摩擦力不是保守力。