Trillium Engineering-无人机万向节有效负载 - 用于战术 UAS 的 EO 和 EO/IR 无人机相机万向节
Trillium Engineering-无人机万向节有效负载 - 用于战术 UAS 的 EO 和 EO/IR 无人机相机万向节
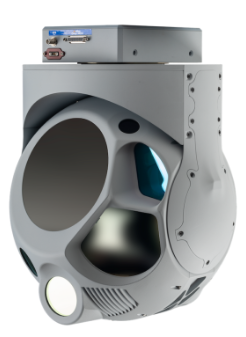
Trillium Engineering 是战术无人机和无人驾驶飞行器(UAV)相机云台有效载荷的领先开发商。我们尖端的成像技术已被应用于各种领先的无人机平台,包括美国陆军服役的德事隆系统公司(Textron Systems)Aerosonde、Quantum-Systems Vector 和 Martin 无人机 V-BAT。

我们的无人机万向节具有坚固的结构和防止灰尘和水进入的环境密封,并采用强大的直接驱动架构设计,提供最高的精度和稳定性。
HD25
具有地理定位功能的微型 EO 或 EO/IR 万向架
HD25 是一款轻巧紧凑的无人机摄像云台,提供 720p 高清数字 H.264 兼容视频输出,配备 3 倍光学变焦可见光摄像头和可选的定焦非制冷长波红外摄像头。机载 GPS 辅助惯性导航系统 (INS) 与摄像头位于同一位置,使云台能够提供实时地理定位和地理指向,从而实现高精度目标跟踪。

机载 GPS 辅助惯性导航系统 (INS) 与摄像机位于同一位置,使云台能够提供实时地理定位和地理指向,从而实现高精度瞄准。先进的嵌入式视频处理功能包括场景跟踪和目标跟踪。云台可通过以太网或串行接口控制,视频可通过以太网或模拟接口输出。
HD40
具有强大变焦功能和集成激光指示器的无人机摄像机万向架
HD40 是一款先进的无人机云台,提供 30 倍光学变焦纯光电配置,以及配备 10 倍光学变焦可见光摄像头和定焦非制冷长波红外摄像头的光电/红外系统。该云台包含多种先进的软件功能,例如场景和目标跟踪,并集成了兼容 850 nm 夜视的激光指示器

HD45
坚固的无人机万向架,配备具有光学变焦功能的 EO 和红外摄像机
HD45 是一款坚固轻巧的无人机光电/红外云台,配备可见光和长波红外摄像头(具有光学变焦功能),以及兼容夜视的 850 nm 激光指示器。机载惯性测量单元 (IMU) 可升级,精度可达 1 度,实现一流的地理定位和点位功能。该云台可选配 5 倍光学变焦非制冷长波红外摄像头以及 5 倍或 10 倍光学变焦可见光摄像头。

HD55
具有多种配置的高性能稳定云台
HD55 是一款先进的无人机云台,提供光电/红外或双光电摄像头功能,并配备 850nm 激光指示器,可实现精准隐蔽的指向。先进的内置 GPS 辅助惯性导航系统 (INS) 精度可达 0.5 度,从而实现最佳的实时地理指向和定位功能。视频输出兼容 H.264 和 H.265 压缩格式。

HD80
功能强大的无人机云台,配备 LWIR 和 MWIR 热成像选项
HD80 是一款功能强大的无人机云台,拥有一流的稳定性和多种昼夜作业选项。它配备先进的嵌入式视频处理功能,例如场景和目标跟踪,能够对静态和动态目标进行高精度实时定位。该云台可作为双光电摄像机系统使用,或提供多种光电/红外配置,并配备中波红外或长波红外热成像选项。

HD95
专为美国陆军打造的战术无人机系统光电/红外云台有效载荷
HD95 是一款针对 SWaP(尺寸、重量和功率)进行优化的光电/红外云台,专为满足美国陆军未来垂直升力无人机系统 (VLSI) 的要求而开发。该云台旨在提供最先进的空中侦察和成像能力,配备全局快门光电相机、中波红外 (MWIR) 和短波红外 (SWIR) 热像仪、激光指示器、激光测距仪以及符合 STANAG 3733 标准的激光目标指示器。
清晰度-HD
人工智能驱动的处理解决方案,实现先进的万向节功能
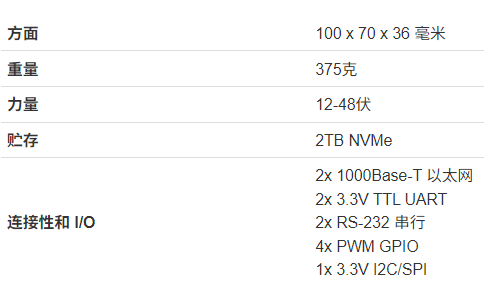
Clarity-HD 是一款低 SWaP 处理模块,旨在加速将先进的 AI 和机器学习软件集成到 Trillium 云台中。该高度通用的计算平台增强了战术无人机系统 (UAS) 的功能,并且可以通过软件应用程序和更新轻松升级,确保解决方案面向未来。

Clarity-HD 是一款紧凑轻巧的处理模块,旨在加速将先进的 AI 和机器学习软件集成到 Trillium 云台中。它利用 Ubuntu Linux 操作系统和 NVIDIA Jetpack SDK(适用于 Jetson AI 平台)的实用功能,只需极少的培训即可轻松部署。
高度通用的计算平台增强了战术无人机系统的能力,并且可以通过软件应用程序和更新轻松升级,确保解决方案面向未来。