OpenCV:背景建模
目录
一、背景建模核心方法对比
二、高斯混合模型(MOG2)核心原理
三、完整实战代码:MOG2 背景建模与运动目标检测
3.1 代码整体流程
3.2 完整代码实现
四、关键参数调整与优化技巧
4.1 MOG2 建模器参数调整
4.2 形态学与轮廓筛选优化
五、常见问题与解决方案
问题 1:前景掩码出现大量噪声
问题 2:运动目标出现 “空洞”(内部变黑)
在计算机视觉的视频分析领域,背景建模是核心技术之一。它的核心目标是从动态视频序列中分离出静态背景与动态前景(如移动的人、车辆、物体等),为后续的运动目标跟踪、行为分析等任务奠定基础。
一、背景建模核心方法对比
背景建模的方法有多种,不同方法在鲁棒性、速度、适用场景上各有差异。以下是三种主流方法的对比,帮助你快速选择适合的方案:
| 方法 | 原理 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|---|
| 帧差法(Frame Difference) | 对连续两帧图像做差分运算,通过灰度差阈值判断运动区域 | 计算简单、速度快 | 易产生 “空洞”(目标内部变黑)和噪声,对缓慢运动目标检测效果差 | 实时性要求高、场景简单(如监控静止背景下的快速运动目标) |
| K 近邻算法(BackgroundSubtractorKNN) | 为每个像素维护 K 个最近邻样本,通过判断当前像素与 K 个样本的匹配度区分背景与前景 | 对动态背景(如抖动树叶)鲁棒性较好 | 计算复杂度高于帧差法,实时性略差 | 背景有轻微动态变化的场景(如户外监控、带有飘动窗帘的室内) |
| 高斯混合模型(BackgroundSubtractorMOG2) | 为每个像素建立多个高斯模型描述灰度分布,自适应更新背景模型 | 支持光照变化自适应,能检测阴影(可配置),鲁棒性最强 | 计算量相对较大,需合理调整参数平衡速度与精度 | 复杂场景(如光照变化的室内、车流量较大的道路监控) |
实战选择:本文优先选择BackgroundSubtractorMOG2,因其在大多数实际场景(如光照变化、动态背景)下表现更优,且 OpenCV 对其封装完善,调用便捷。
二、高斯混合模型(MOG2)核心原理
MOG2(Mixture of Gaussians 2)是经典高斯混合模型的改进版,核心逻辑是为视频的每个像素点维护一个多高斯分布集合,用于描述该像素在 “背景状态” 下的灰度变化规律:
模型初始化:视频初始帧时,为每个像素初始化 1-5 个高斯模型(默认 5 个),覆盖该像素的初始灰度值分布。
背景更新:后续每一帧,将当前像素的灰度值与已有的高斯模型匹配:
- 若匹配成功(灰度值落在某高斯模型的标准差范围内),则判定为背景像素,并更新该高斯模型的参数(均值、标准差、权重),适应缓慢的背景变化(如光照渐变)。
- 若匹配失败,则判定为前景像素,并替换权重最小的高斯模型为新的高斯模型(适应突发的背景变化,如临时出现的静态物体)。
阴影检测:通过判断前景像素与背景模型的亮度差异(默认阴影亮度为背景的 0.5-1.0 倍),可将阴影标记为灰色(区别于白色前景),后续可通过阈值过滤阴影。
三、完整实战代码:MOG2 背景建模与运动目标检测
3.1 代码整体流程
- 读取视频(本地视频文件或摄像头实时流)。
- 创建 MOG2 背景建模器与形态学操作的卷积核。
- 逐帧处理:提取前景掩码 → 形态学去噪 → 轮廓检测与筛选 → 绘制运动目标边界框。
- 显示结果并处理退出逻辑。
3.2 完整代码实现
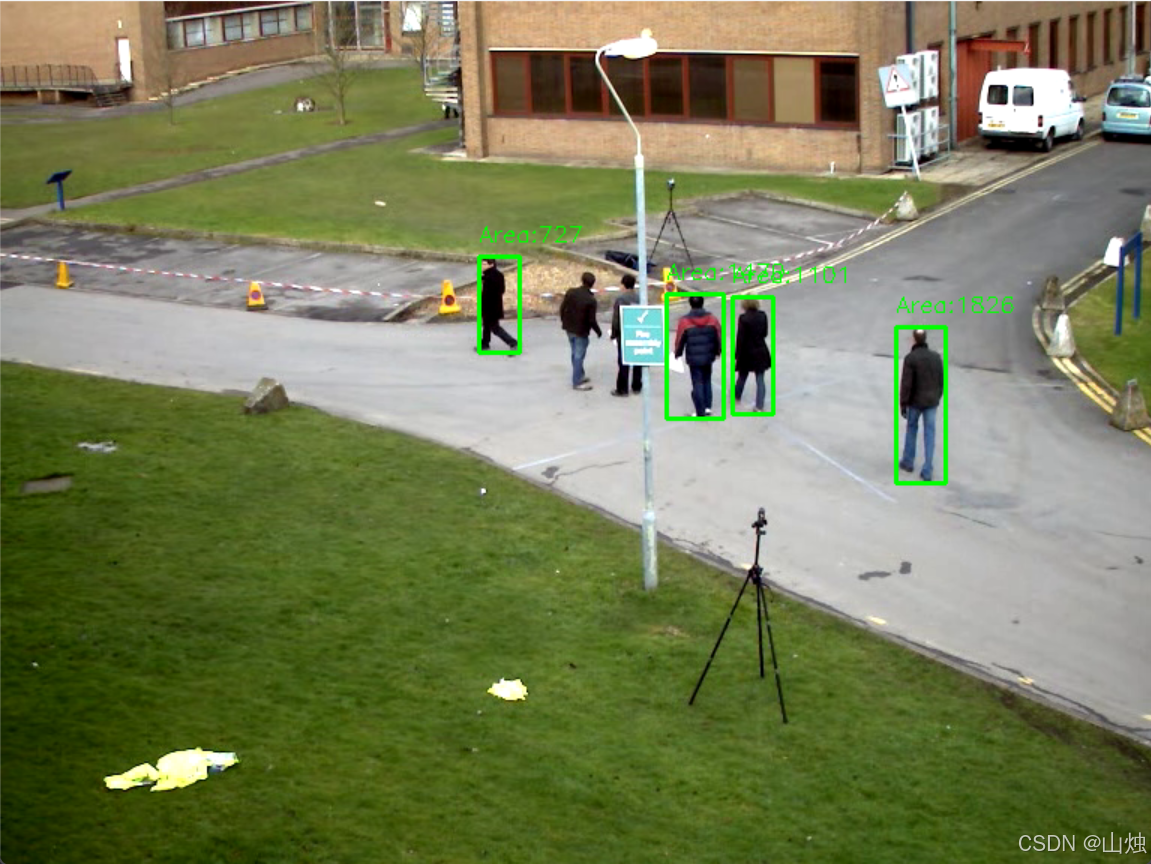
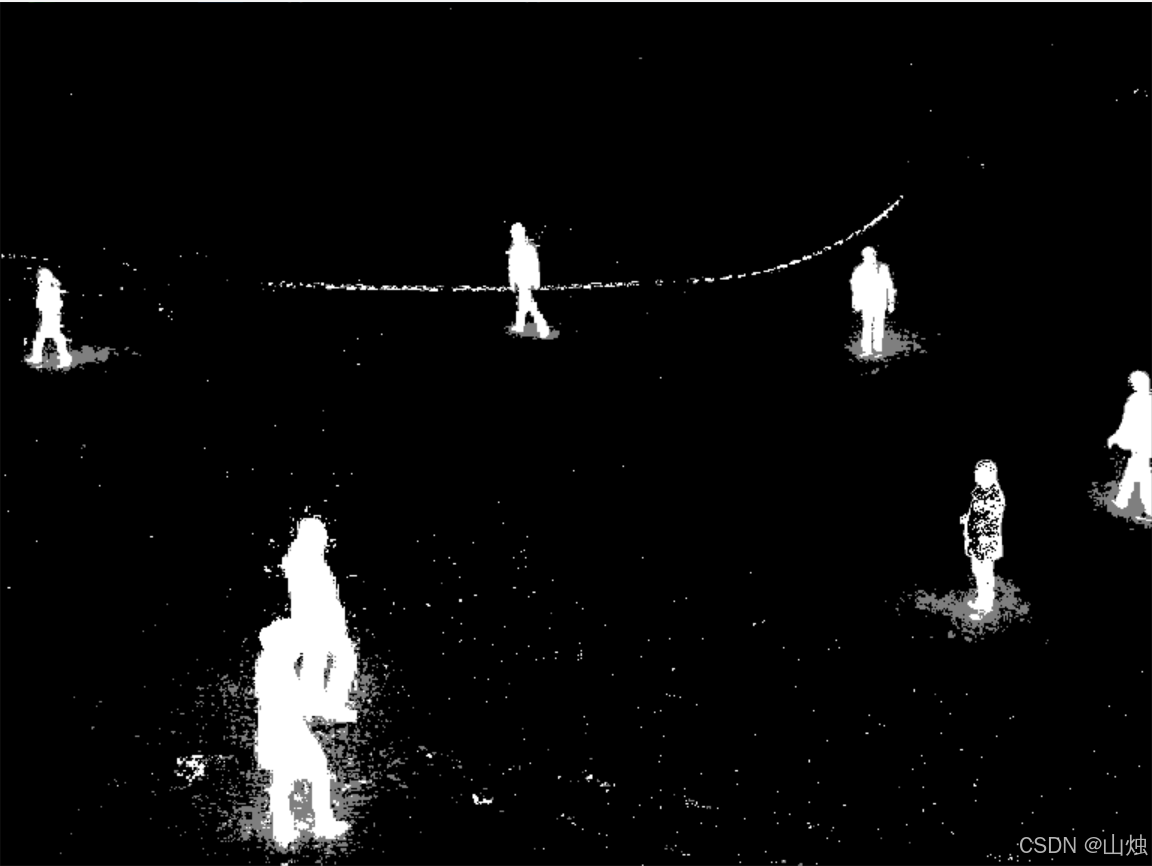
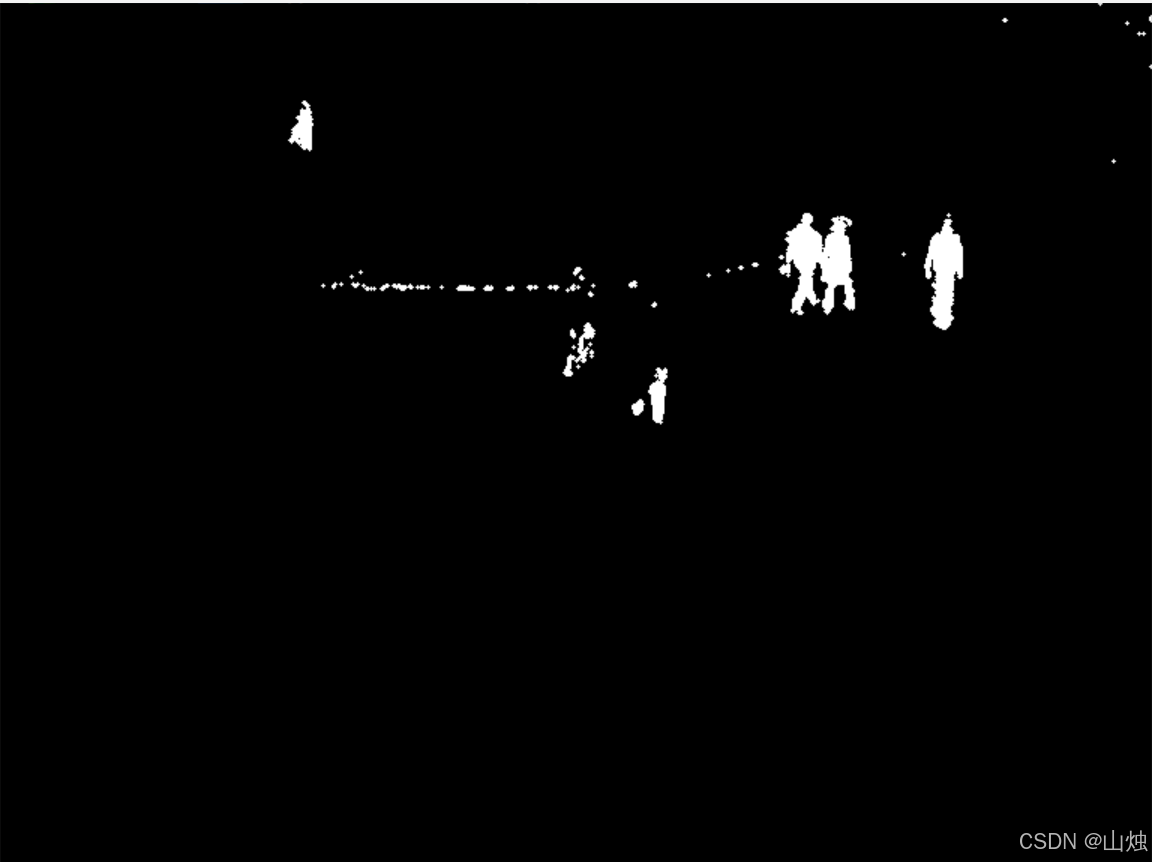
import cv2def bg_subtraction_mog2(video_path='test.avi', use_camera=False):"""基于MOG2的背景建模与运动目标检测:param video_path: 本地视频文件路径(默认'test.avi'):param use_camera: 是否使用摄像头(True:摄像头,False:本地视频)"""# 1. 读取视频源(摄像头或本地文件)if use_camera:cap = cv2.VideoCapture(0) # 0表示默认摄像头else:cap = cv2.VideoCapture(video_path)# 检查视频是否成功打开if not cap.isOpened():print(f"错误:无法打开视频源(路径:{video_path})")return# 2. 初始化MOG2背景建模器# detectShadows=True:检测阴影(阴影标记为灰色),False:不检测(速度更快)fgbg = cv2.createBackgroundSubtractorMOG2(history=500, # 背景模型的历史帧数(默认500,值越大背景更新越慢)varThreshold=16, # 像素与高斯模型的匹配阈值(值越大前景检测越宽松)detectShadows=True # 是否检测阴影)# 3. 定义形态学操作的卷积核(用于去除前景掩码的噪声)# 十字形卷积核:对细长噪声的去除效果优于矩形核kernel = cv2.getStructuringElement(shape=cv2.MORPH_CROSS, # 卷积核形状:十字形(可选MORPH_RECT矩形、MORPH_ELLIPSE椭圆形)ksize=(3, 3) # 卷积核大小:3×3(太小去噪不彻底,太大易模糊前景轮廓))print("提示:按ESC键退出程序")# 4. 逐帧处理视频while True:# 读取当前帧(ret:是否成功读取,frame:当前帧图像)ret, frame = cap.read()# 若读取失败(视频结束或出错),退出循环if not ret:print("视频读取完毕或出错,退出程序")break# 5. 提取前景掩码(foreground mask)# 掩码规则:前景→白色(255),背景→黑色(0),阴影→灰色(127,仅detectShadows=True时)fgmask = fgbg.apply(frame)# 6. 形态学开运算:先腐蚀后膨胀,去除前景掩码中的小噪声点# 腐蚀:消除细小噪声;膨胀:恢复前景目标的原始轮廓(避免腐蚀导致目标缩小)fgmask_clean = cv2.morphologyEx(src=fgmask,op=cv2.MORPH_OPEN,kernel=kernel)# 7. (可选)过滤阴影:将阴影(灰度127)转为背景(0)if fgbg.getDetectShadows():fgmask_clean[fgmask_clean == 127] = 0 # 只保留纯白前景(255)# 8. 检测前景轮廓(仅保留外部轮廓,压缩轮廓点以减少计算量)contours, _ = cv2.findContours(image=fgmask_clean,mode=cv2.RETR_EXTERNAL, # 只检测最外层轮廓method=cv2.CHAIN_APPROX_SIMPLE # 压缩轮廓:只保留角点(减少轮廓点数量))# 9. 筛选轮廓并绘制运动目标边界框# 筛选逻辑:排除面积/周长过小的轮廓(避免噪声误判为目标)for contour in contours:# 计算轮廓周长(True表示轮廓是闭合的)perimeter = cv2.arcLength(contour, closed=True)# 计算轮廓面积area = cv2.contourArea(contour)# 阈值调整建议:根据视频分辨率调整(如1080P视频阈值可设为500,480P设为188)if perimeter > 188 and area > 200: # 同时过滤周长和面积,减少误检# 获取轮廓的外接矩形(x:左上角x坐标,y:左上角y坐标,w:宽,h:高)x, y, w, h = cv2.boundingRect(contour)# 绘制绿色边界框(颜色:(0,255,0),线宽:2)cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)# (可选)在框内标注目标面积cv2.putText(img=frame,text=f"Area:{area:.0f}",org=(x, y - 10), # 文本左上角坐标(在框上方10像素处)fontFace=cv2.FONT_HERSHEY_SIMPLEX,fontScale=0.5, # 字体大小color=(0, 255, 0),# 文本颜色thickness=1 # 文本线宽)# 10. 显示结果窗口cv2.imshow("Original Frame(原始帧)", frame) # 带目标框的原始帧cv2.imshow("FG Mask(原始前景掩码)", fgmask) # 未去噪的前景掩码cv2.imshow("Clean FG Mask(去噪后前景掩码)", fgmask_clean) # 去噪后的前景掩码# 11. 处理退出:按ESC键(ASCII码27)退出,等待60ms(控制视频播放速度,1ms≈1000fps)key = cv2.waitKey(60)if key == 27:print("用户按下ESC键,退出程序")break# 12. 释放资源(关闭视频流和所有窗口)cap.release()cv2.destroyAllWindows()# 调用函数(默认读取本地test.avi,若用摄像头则设use_camera=True)
if __name__ == "__main__":bg_subtraction_mog2(video_path="test.avi", use_camera=False)
四、关键参数调整与优化技巧
4.1 MOG2 建模器参数调整
| 参数 | 作用 | 调整建议 |
|---|---|---|
history | 背景模型的历史帧数,决定背景更新速度 | - 静态背景(如室内无变化):设为 1000(更新慢,避免误判) - 动态背景(如户外树叶飘动):设为 200-500(更新快,适应背景变化) |
varThreshold | 像素与高斯模型的匹配阈值(方差阈值) | - 低噪声场景:设为 10-16(检测严格,减少误检) - 高噪声场景(如低光、颗粒噪声):设为 20-32(检测宽松,避免漏检) |
detectShadows | 是否检测阴影 | - 需要过滤阴影(如交通监控):设为True,后续用fgmask[fgmask==127]=0去除- 实时性优先(如快速运动目标):设为 False,减少计算量 |
4.2 形态学与轮廓筛选优化
卷积核选择:
若噪声为细小点状:用 3×3 十字核(MORPH_CROSS)或矩形核(MORPH_RECT)。
若噪声为细长条状:用 3×3 椭圆形核(MORPH_ELLIPSE)。
轮廓筛选阈值:
需根据视频分辨率调整:例如 480P 视频(640×480)用perimeter>188+area>200,1080P 视频(1920×1080)需将阈值翻倍(如perimeter>360+area>800),避免将小噪声误判为目标。
五、常见问题与解决方案
问题 1:前景掩码出现大量噪声
- 原因:光照突变、摄像头噪点、
varThreshold值过小。 - 解决方案:增大
varThreshold(如从 16→24),或在形态学开运算后增加 “膨胀” 操作(cv2.morphologyEx(fgmask_clean, cv2.MORPH_DILATE, kernel))。
问题 2:运动目标出现 “空洞”(内部变黑)
- 原因:目标运动过快,帧间差分不完整,或
history值过大导致背景更新滞后。 - 解决方案:减小
history(如从 500→200),或用 5×5 卷积核增强形态学去噪效果。