PETRV1在NuScenes数据集上的推理及可视化详解
PETRV1在NuScenes数据集上的推理及可视化详解
-
- 一、背景介绍
- 二、效果展示
- 三、流程图解
-
- 1. 如何生成模型需要的图像
- 2. 如何生成img2lidar变换矩阵
- 3. 如何将推理输出的3D框可视化在点云及图像上
- 四、完整代码实现
- 五、总结
一、背景介绍
本文旨在详细演示如何利用PETRV1模型在NuScenes自动驾驶数据集上进行3D目标检测,并对结果进行可视化。具体内容包括:
-
NuScenes数据集简介:NuScenes是一个大规模自动驾驶数据集,包含多传感器数据(摄像头、激光雷达等)和详细的3D标注信息,广泛应用于3D目标检测算法的训练和评估。
-
PETRV1模型概述:PETRV1是一种基于多视角摄像头的3D目标检测模型,它通过视角转换和时序信息融合,能够有效地从2D图像中预测3D边界框。
-
操作流程:我们将逐步展示如何从NuScenes数据集中提取传感器数据及标定参数,生成PETRV1模型所需的输入,调用PaddlePaddle API进行推理,并将模型输出的3D检测框投影到点云和图像上进行可视化。
本文增加了详细的注释,特别适合刚入门3D目标检测和自动驾驶视觉感知的新手阅读和理解。
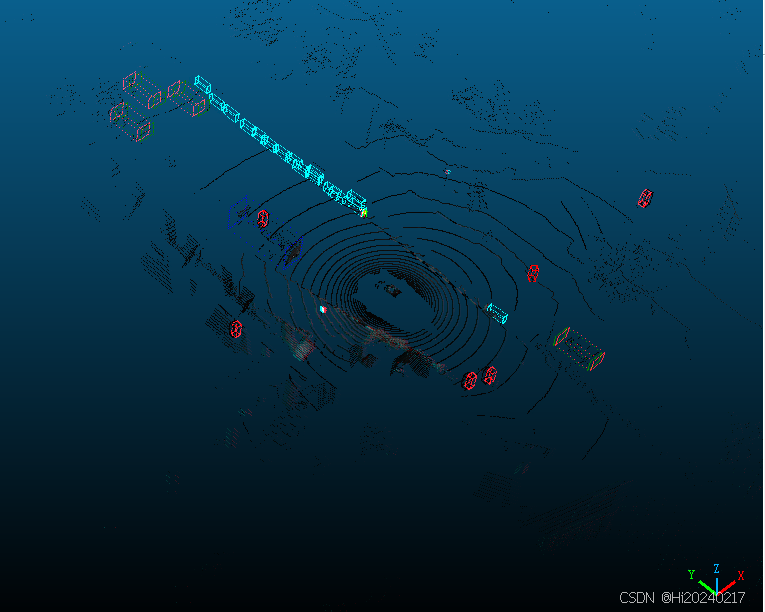
二、效果展示
在执行完整个流程后,我们将得到以下可视化结果:
-
模型输入多视角图像

-
检测结果多视角图像

-
点云可视化