深入理解 Linux 进程调度:从策略到实现的全方位解析
在操作系统的核心功能中,进程调度扮演着 “指挥家” 的角色,它决定了 CPU 资源如何在众多进程间分配,直接影响系统的响应速度、吞吐量与公平性。Linux 作为主流的开源操作系统,其进程调度机制经过多年演进,形成了一套兼顾普通任务与实时任务、平衡公平与效率的复杂体系。本文将从调度策略、算法实现、核心机制到实时调度,全方位拆解 Linux 进程调度的内在逻辑。
一、Linux 进程调度的核心策略
进程调度的本质是 “资源分配规则”,Linux 首先通过对进程类型的划分、优先级的定义以及时间片的管理,构建了调度策略的基础框架。
1.1 进程类型:I/O 消耗型 vs 处理机消耗型
不同进程对 CPU 和 I/O 资源的需求差异巨大,调度策略需针对性优化,因此 Linux 将进程分为两类:
- I/O 消耗型进程:大部分时间用于等待 I/O 操作(如磁盘读写、网络请求、用户输入),实际占用 CPU 的时间很短。典型例子包括 GUI 界面程序(如桌面窗口管理器)、文本编辑器、网络服务(如 Nginx 的 worker 进程)。这类进程无需长时间占用 CPU,更需要 “快速响应”—— 即 I/O 完成后能立即获得 CPU 资源。
- 处理机消耗型进程:大部分时间用于执行代码,对 CPU 资源需求高,I/O 操作极少。典型例子包括数学计算程序(如矩阵运算、数据加密)、视频编码软件。这类进程希望尽可能长地占用 CPU,减少切换带来的开销。
1.2 进程优先级:两类优先级体系
Linux 采用两套独立的优先级范围,确保不同类型的进程(普通进程、实时进程)能得到差异化调度:
| 优先级类型 | 取值范围 | 核心作用 | 特点 |
|---|---|---|---|
| Nice 值 | -20 ~ +19 | 决定普通进程的 CPU 使用比例 | Nice 值越小,优先级越高;值越大,优先级越低。它不直接对应 “时间片长度”,而是影响进程在 CPU 资源分配中的权重 |
| 实时优先级 | 0 ~ 99 | 决定实时进程的调度顺序 | 实时优先级高于所有普通进程(即实时进程会抢占普通进程);实时优先级越大,进程优先级越高 |
可通过命令 ps -eo state,uid,pid,ppid,rtprio,time,comm 查看进程的实时优先级(rtprio)、运行时间(time)等信息,例如实时进程的 rtprio 会显示非 0 值,普通进程则为 0。
1.3 时间片:平衡响应性与吞吐量
时间片是进程被抢占前可连续运行的最大时间,但 Linux 的 CFS 调度器(针对普通进程)对时间片的管理并非 “固定分配”,而是动态调整:
- 时间片的矛盾点:
- 时间片过长:系统响应性差,例如用户点击鼠标后,GUI 进程需等待当前时间片结束才能运行,导致 “卡顿”。
- 时间片过短:进程切换频率升高,CPU 会花费大量时间保存 / 恢复进程上下文(如寄存器、栈信息),降低系统总吞吐量。
- CFS 的优化思路:
传统调度器为每个进程分配固定时间片,而 CFS(完全公平调度器)不直接分配时间片,而是为进程分配 “CPU 使用比例”。例如,两个 Nice 值相同的进程,理论上各占 50% 的 CPU 时间;若一个进程 Nice 值为 - 10(优先级更高),另一个为 + 10(优先级更低),则前者的 CPU 使用比例会远高于后者。
最终进程获得的实际运行时间,会根据系统当前的可运行进程总数动态计算 —— 可运行进程越多,单个进程的单次运行时间越短,但始终保证 “比例公平”。
二、Linux 调度算法
Linux 的调度器采用模块化设计(调度器类) ,允许不同类型的进程使用针对性的调度算法,核心是 “按调度器类优先级选择,再在类内选择进程”。
2.1 调度器类:多算法并存的框架
调度器类(scheduler class)是 Linux 调度机制的核心架构,其设计目标是 “让不同进程类型(普通、实时、空闲)使用最适合的调度算法”:
- 核心逻辑:每个调度器类有一个优先级,基础调度器(定义在
kernel/sched.c)会按优先级从高到低遍历所有调度器类,选择 “拥有可执行进程的最高优先级调度器类”,由该类负责选择下一个要运行的进程。 - 常见调度器类:
SCHED_RT:实时调度器类,负责管理实时进程(采用 SCHED_FIFO/SCHED_RR 算法),优先级最高。SCHED_NORMAL:普通调度器类,即 CFS 调度器,负责管理普通进程,优先级次之。SCHED_IDLE:空闲调度器类,仅当系统无其他可运行进程时才运行,优先级最低。
2.2 CFS:普通进程的 “完全公平” 调度
CFS(Completely Fair Scheduler)是 Linux 针对普通进程的默认调度算法,其设计理念是 “模拟理想的多任务 CPU”,让每个进程获得公平的 CPU 时间。
2.2.1 CFS 的核心理念:理想多任务模型
理想的多任务 CPU 能 “同时运行所有进程”,例如 1 个 CPU 运行 2 个进程时,每个进程能获得 50% 的 CPU 资源,且运行周期无限小(无切换开销)。但现实中 CPU 是 “分时复用” 的,CFS 通过以下方式逼近理想模型:
- 不依赖固定时间片:传统调度器按时间片轮转,CFS 则通过 “虚拟运行时间(vruntime)” 追踪进程的 CPU 使用情况,始终选择 “vruntime 最小的进程” 运行 —— 确保每个进程的 CPU 使用比例符合其优先级。
- 目标延迟与最小粒度:
- 目标延迟(target latency):CFS 希望所有可运行进程在 “目标延迟” 内都能被调度一次(例如默认 20ms),目标延迟越小,响应性越好,但切换开销越高。
- 最小粒度(minimum granularity):当可运行进程过多时(如超过 100 个),若按目标延迟分配时间,单个进程的运行时间会过小(如 20ms/100=0.2ms),导致切换开销不可接受。因此 CFS 设置 “最小粒度”(默认 1ms),即进程单次运行时间不低于 1ms—— 此时公平性会略有妥协,但保证系统吞吐量。
2.2.2 CFS 的公平性:基于 Nice 值的权重计算
CFS 的 “公平” 并非 “时间均等”,而是 “比例均等”,其核心是通过 Nice 值计算进程的权重:
- Nice 值与权重的映射:Linux 预定义了 Nice 值到权重的对应表(如 Nice=0 时权重为 1024,Nice=-10 时权重为 2048,Nice=+10 时权重为 512)。
- CPU 使用比例计算:进程的 CPU 使用比例 = 进程权重 / 所有可运行进程的权重之和。例如,进程 A(权重 1024)和进程 B(权重 512)同时运行时,A 的使用比例为 2/3,B 为 1/3,即 A 的运行时间是 B 的 2 倍。
三、Linux 调度的核心实现
CFS 的算法逻辑通过具体的数据结构和函数实现,核心包括 “时间记账”“进程选择”“调度入口”“睡眠与唤醒” 四大模块,相关代码主要位于kernel/sched_fair.c和kernel/sched.c。
3.1 时间记账:追踪进程的 “虚拟运行时间”
CFS 需要精确记录每个进程的 CPU 使用情况,才能判断 “哪个进程该运行”,核心是调度器实体(struct sched_entity) 和虚拟运行时间(vruntime):
- 调度器实体:嵌入在进程描述符(
struct task_struct)中,名为se,用于存储进程的调度相关信息,包括 vruntime、权重、运行时间等。 - 虚拟运行时间(vruntime):
- 定义:进程实际运行时间经过 “权重标准化” 后的时间,公式为:
vruntime += 实际运行时间 * 1024 / 进程权重(1024 是 Nice=0 时的权重,作为基准)。 - 作用:vruntime 越小,说明进程 “欠 CPU 时间越多”,因此 CFS 会优先选择 vruntime 最小的进程运行,确保公平性。
- 定义:进程实际运行时间经过 “权重标准化” 后的时间,公式为:
- 记账函数:
update_curr()(定义在kernel/sched_fair.c),每次时钟节拍(tick)或进程切换时调用,更新当前进程的 vruntime 和实际运行时间。
3.2 进程选择:红黑树的高效检索
CFS 需要快速找到 “vruntime 最小的进程”,因此采用红黑树(rbtree) 组织可运行进程队列:
- 红黑树的特点:有序(按 vruntime 从小到大排序)、插入 / 删除 / 查找的时间复杂度为 O (log n),适合大量进程的场景。
- 核心操作:
- 挑选下一个进程:调用
__pick_next_entity(),直接选择红黑树的 “最左叶子节点”(vruntime 最小)。 - 加入进程:进程被唤醒或创建时,调用
enqueue_entity(),将进程的调度器实体插入红黑树(按 vruntime 排序)。 - 删除进程:进程睡眠或终止时,调用
dequeue_entity(),将进程从红黑树中移除。
- 挑选下一个进程:调用
3.3 调度入口:schedule () 函数的核心逻辑
进程调度的 “总入口” 是schedule()函数(定义在kernel/sched.c),内核其他模块(如进程睡眠、时间片用完)通过调用schedule()触发调度,其核心步骤如下:
- 检查当前系统状态,确保调度安全(如禁止中断)。
- 调用
pick_next_task(),按调度器类优先级从高到低遍历(先实时调度器类,再普通调度器类),选择最高优先级调度器类中的最优进程。 - 若选中的进程与当前进程不同,调用
context_switch()切换上下文。 - 恢复中断,完成调度。
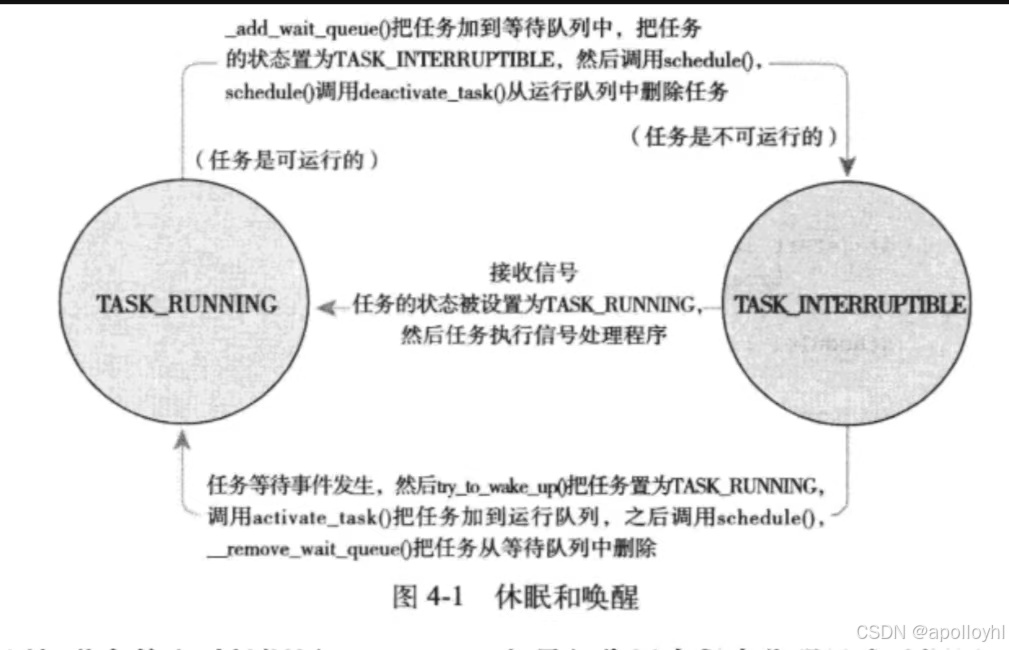
3.4 睡眠与唤醒:等待队列与红黑树的协作
进程会因等待 I/O、等待信号等原因进入睡眠状态,此时需从可运行队列中移除;当等待条件满足时,再被唤醒并重新加入可运行队列:
- 睡眠流程:
- 调用
DEFINE_WAIT()创建等待队列项(记录进程信息)。 - 调用
add_wait_queue()将等待队列项加入 “等待队列”(内核用wait_queue_head_t表示)。 - 调用
prepare_to_wait()将进程状态设为TASK_INTERRUPTIBLE(可被信号唤醒)或TASK_UNINTERRUPTIBLE(不可被信号唤醒)。 - 调用
schedule(),进程被移出红黑树,CPU 切换到其他进程。
- 调用
- 唤醒流程:
- 等待条件满足时(如 I/O 完成),调用
wake_up()唤醒等待队列上的所有进程。 wake_up()调用try_to_wake_up(),将进程状态设为TASK_RUNNING。- 调用
enqueue_task(),将进程重新插入红黑树。 - 若被唤醒进程的优先级高于当前运行进程,设置
need_resched标志,触发下一次调度。
- 等待条件满足时(如 I/O 完成),调用
四、抢占与上下文切换
当高优先级进程需要运行时,Linux 会 “抢占” 当前运行的低优先级进程,通过context_switch()函数完成 CPU 控制权的交接,核心是 “虚拟内存切换” 和 “处理器状态切换”。
4.1 抢占的触发条件
Linux 支持 “用户态抢占” 和 “内核态抢占”(2.6 版本后引入):
- 用户态抢占:当进程从内核态返回用户态时,若
need_resched标志被设置(如高优先级进程被唤醒),则触发抢占。 - 内核态抢占:内核态代码执行过程中,若没有持有自旋锁(spinlock),且
need_resched标志被设置,则触发抢占(如中断处理完成后)。
4.2 上下文切换:context_switch () 的核心步骤
context_switch()函数(定义在kernel/sched.c)负责将 CPU 从当前进程(prev)切换到目标进程(next),分为两步:
- 虚拟内存切换:调用
switch_mm()(定义在asm/mmu_context.h),将页表从 prev 的页表切换到 next 的页表,确保 next 进程访问的虚拟地址能映射到正确的物理地址。 - 处理器状态切换:调用
switch_to()(定义在asm/system.h),保存 prev 进程的寄存器信息(如 PC、栈指针)到其内核栈,恢复 next 进程的寄存器信息,让 CPU 开始执行 next 进程的代码。
五、实时调度策略:SCHED_FIFO 与 SCHED_RR
Linux 为实时任务(如工业控制、音频处理)提供了两种实时调度策略,由SCHED_RT调度器类管理,相关代码位于kernel/sched_rt.c。
5.1 实时调度的核心特点
- 优先级高于普通进程:所有实时进程的优先级(0~99)高于普通进程(Nice 值对应优先级),实时进程会抢占普通进程。
- 无时间片限制(SCHED_FIFO):一旦 SCHED_FIFO 进程获得 CPU,会一直运行直到主动放弃(如睡眠)或被更高优先级的实时进程抢占。
- 时间片轮转(SCHED_RR):SCHED_RR 进程有时间片限制,时间片用完后,会被放到同优先级实时进程队列的末尾,确保同优先级进程能轮流运行。
5.2 两种实时策略的对比
| 策略 | 时间片 | 抢占规则 | 适用场景 |
|---|---|---|---|
| SCHED_FIFO | 无 | 仅被更高优先级实时进程抢占 | 对延迟要求极高的任务(如工业传感器数据处理) |
| SCHED_RR | 有 | 时间片用完或被更高优先级进程抢占 | 同优先级实时任务需公平轮转的场景(如多通道音频处理) |
总结:Linux 进程调度的设计哲学
Linux 进程调度机制的核心是 “分层设计 + 针对性优化”:
- 从策略层:通过进程类型划分、优先级体系,为不同任务制定差异化规则;
- 从算法层:CFS 通过 “比例公平” 和红黑树,平衡普通进程的响应性与吞吐量;
- 从实现层:通过调度器类、上下文切换、睡眠唤醒等模块,确保调度的高效与稳定;
- 从实时层:提供 SCHED_FIFO/SCHED_RR,满足实时任务的低延迟需求。
理解 Linux 进程调度,不仅能帮助开发者优化程序性能(如通过调整 Nice 值提升关键进程优先级),更能深入体会操作系统 “资源分配与效率平衡” 的设计思想。