5.PFC闭环控制仿真
模型介绍
模型主要由电压外环和电流内环构成双闭环控制系统,还包括输入电压源、整流桥、Boost 变换器、采样与保持模块、PI 调节器、比较器以及 PWM 发生器等部分。
- 输入部分:
- [VAC]:代表交流输入电压源,是整个系统的电能输入起点。
- 整流桥:将交流输入电压转换为直流电压,为后续的 Boost 变换器提供输入。
- Boost 变换器:
- 是实现功率因数校正的核心电路,通过调整开关管的占空比来控制输出电压和电流。
- 电路中的电感、电容等元件起到能量存储和滤波的作用。
- 双闭环控制:
- 电压外环:
- 采样输出直流母线电压 [VBUS],与参考电压(如 380V,由 Constant1 设定)进行比较。
- 误差信号经过 PI 调节器(PI (s))进行调节,输出作为电流内环的参考信号。
- 电流内环:
- 采样输入电流 [IAC] 和电感电流 [IL],与电压外环输出的参考电流进行比较。
- 误差信号经过 PI 调节器(PI (s))后,通过比较器与锯齿波信号比较,生成 PWM 信号,控制 Boost 变换器的开关管。
- 采样与保持模块:
- Sample and Hold:对电压和电流信号进行采样和保持,确保信号在控制周期内的稳定性。
- PI 调节器:
- 用于调节电压和电流的误差,使系统能够快速响应并达到稳定状态。PI 调节器的参数(比例系数和积分系数)对系统性能有重要影响。
- PWM 发生器:
- 根据电流内环输出的控制信号,生成 PWM 信号,控制 Boost 变换器的开关管导通和关断时间,从而调节输出电压和电流。
- 输出部分:
- [VBUS]:代表输出直流母线电压,是系统的最终输出。
- Scope2:用于观察和分析系统的输出波形,如电压、电流等信号。
工作原理
- 交流输入电压 [VAC] 经过整流桥转换为直流电压后,进入 Boost 变换器。
- 电压外环采样输出直流母线电压 [VBUS],与参考电压比较后生成电流内环的参考电流。
- 电流内环采样输入电流 [IAC] 和电感电流 [IL],与电压外环输出的参考电流比较,生成 PWM 信号控制 Boost 变换器的开关管。
- 通过双闭环控制,系统能够自动调节输出电压和电流,使输入电流与输入电压同相位,提高功率因数,并稳定输出直流母线电压。
仿真结果
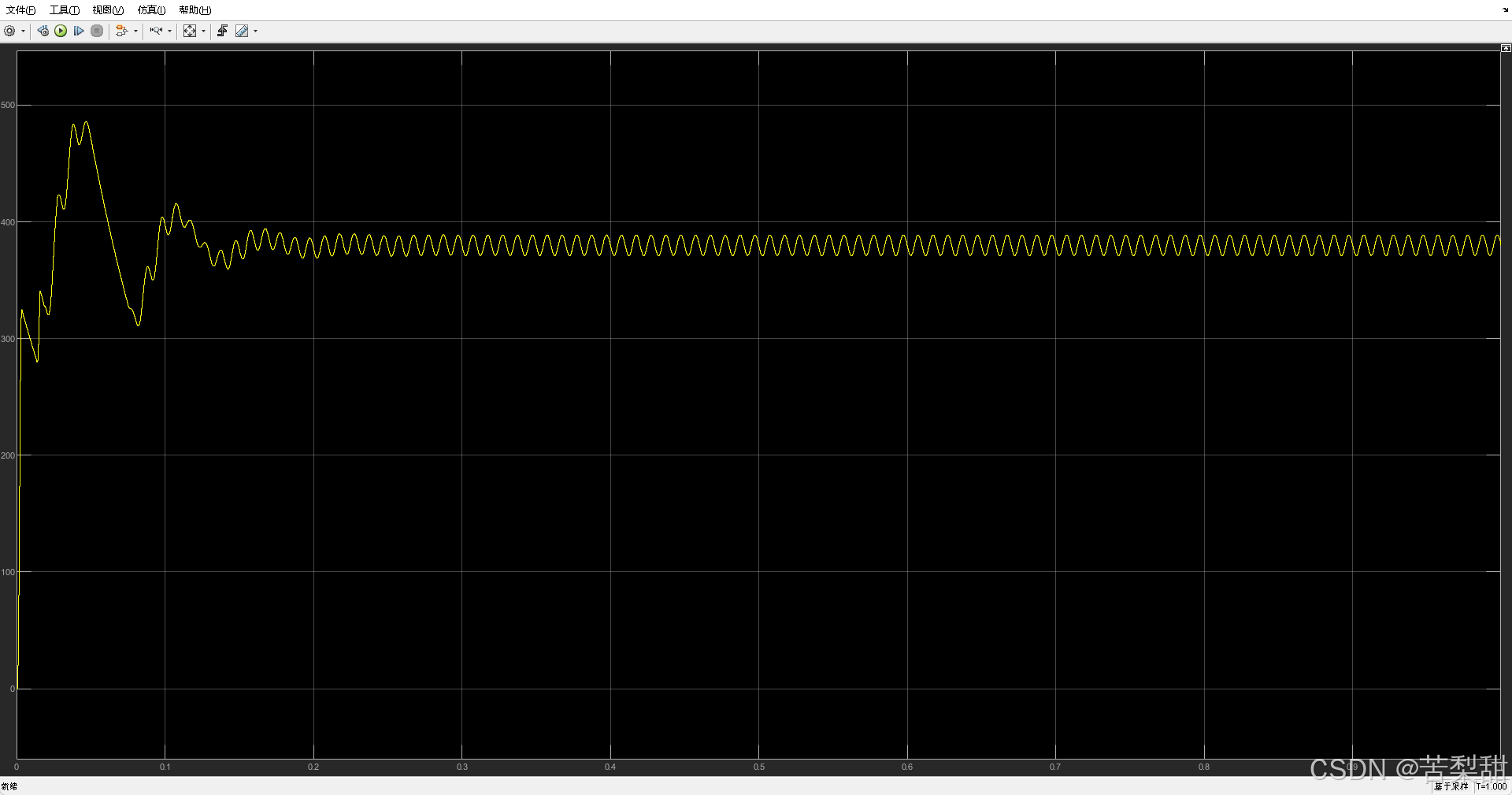
输出电压波形,上面可以看出,从波形上可以看出它在0.2秒或者是0.25秒的。这里的时候进入了稳态,稳态大概在380伏左右。
起始阶段
在波形起始部分(横坐标接近 0 处),可以看到电压有较大幅度的波动和超调。这是因为系统刚开始运行时,输出电压尚未达到稳定状态,控制环路正在快速响应并调整,以使得输出电压趋近于参考电压。
过渡阶段
随着时间推移(横坐标从 0 到大约 0.1 - 0.2 区间),电压波动幅度逐渐减小,但仍存在一定的振荡。这表明系统的控制环路正在不断调节 Boost 变换器的占空比等参数,逐渐克服初始状态下的不稳定因素,向稳定状态过渡。
稳定阶段
从大约横坐标 0.2 往后,波形趋于稳定,呈现出较为规律的小幅波动。这说明此时系统已经进入稳态运行,双闭环控制系统有效地将输出直流母线电压稳定在一个目标值附近。小幅波动可能是由于系统中的负载变化、采样噪声或控制算法本身的特性等因素引起的,但总体来说系统保持了较好的稳定性。
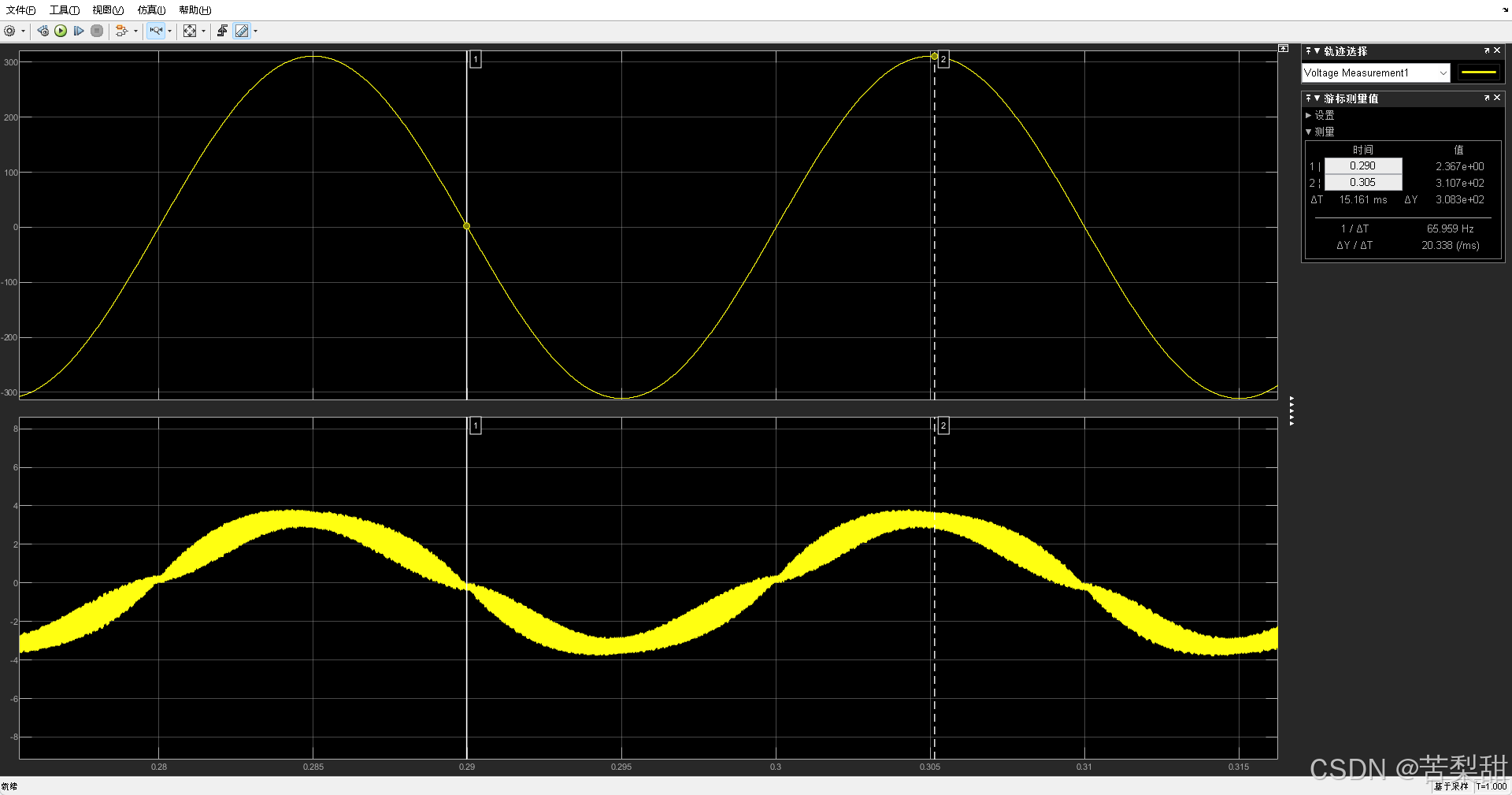
输入电流,我们再来看的话说我们输入电流就是一个标准的正弦电,跟我们这个电压是同相位的一个标准电标准的一个自旋殿峰峰峰值的时候,这里对应的是一个峰值,这就是我们所需要的一个PFC它的一个控制效果。然后过零点也是用一个标尺,可能看起来应该稍微会清楚一些。过零点我们先来看过零点,0.0点在这里你看过零点几乎是一样的。所以说你的过零点附近是一样的话,就代表了你的PF值,PF值就很高,就接近于然后你的一个正弦度然后。里的话稍微可以从这个波形上还是可以看出这个电流还是不是特别的正确。他这边还是会偏左一边,他的峰值还是会有点偏左。所以说你这个电流控制的速度还是稍微慢一些。如果要控制的更好的话,可以电流环或者是整个电流环的速度可能要稍微再加加快一些。