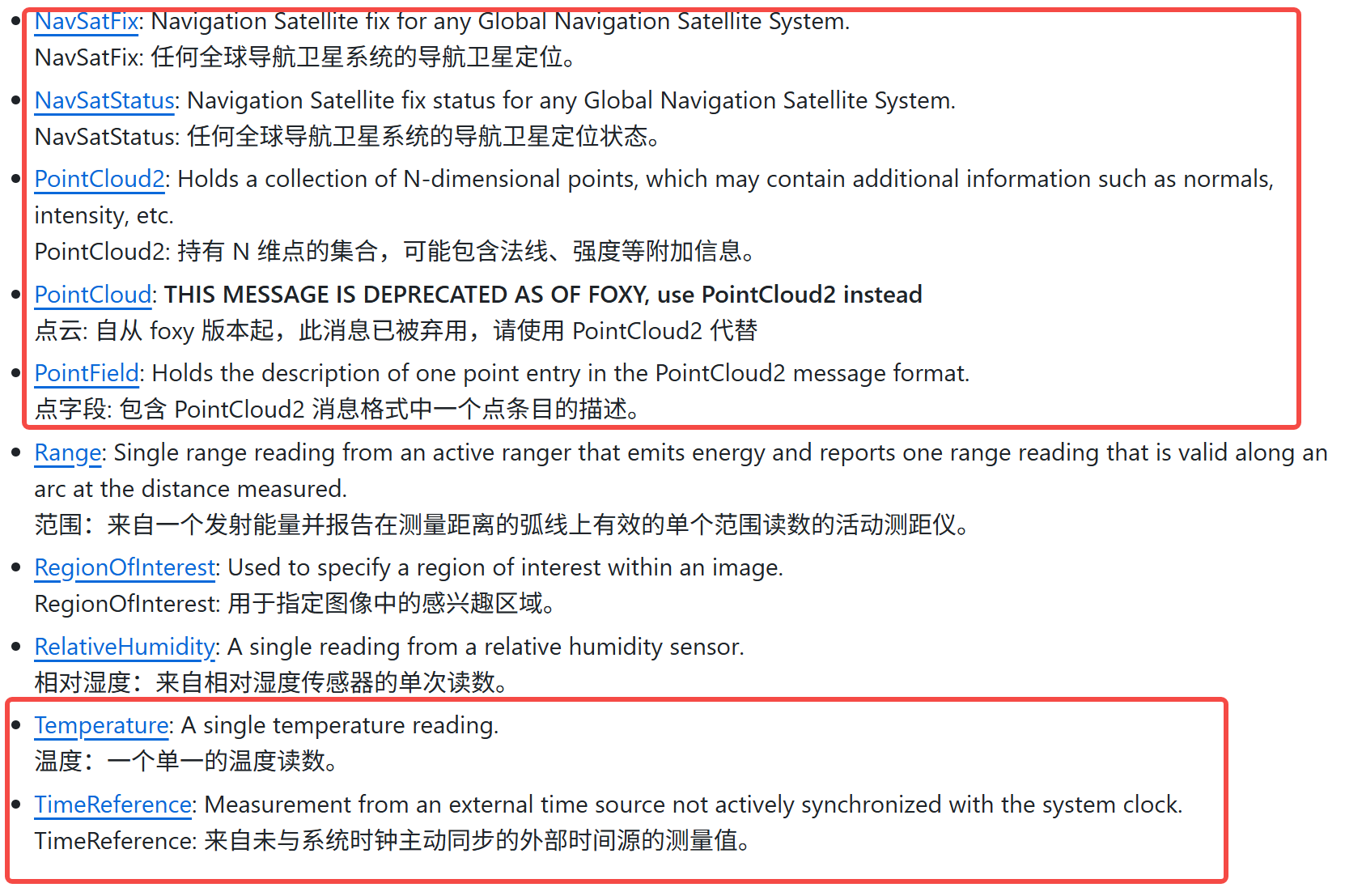
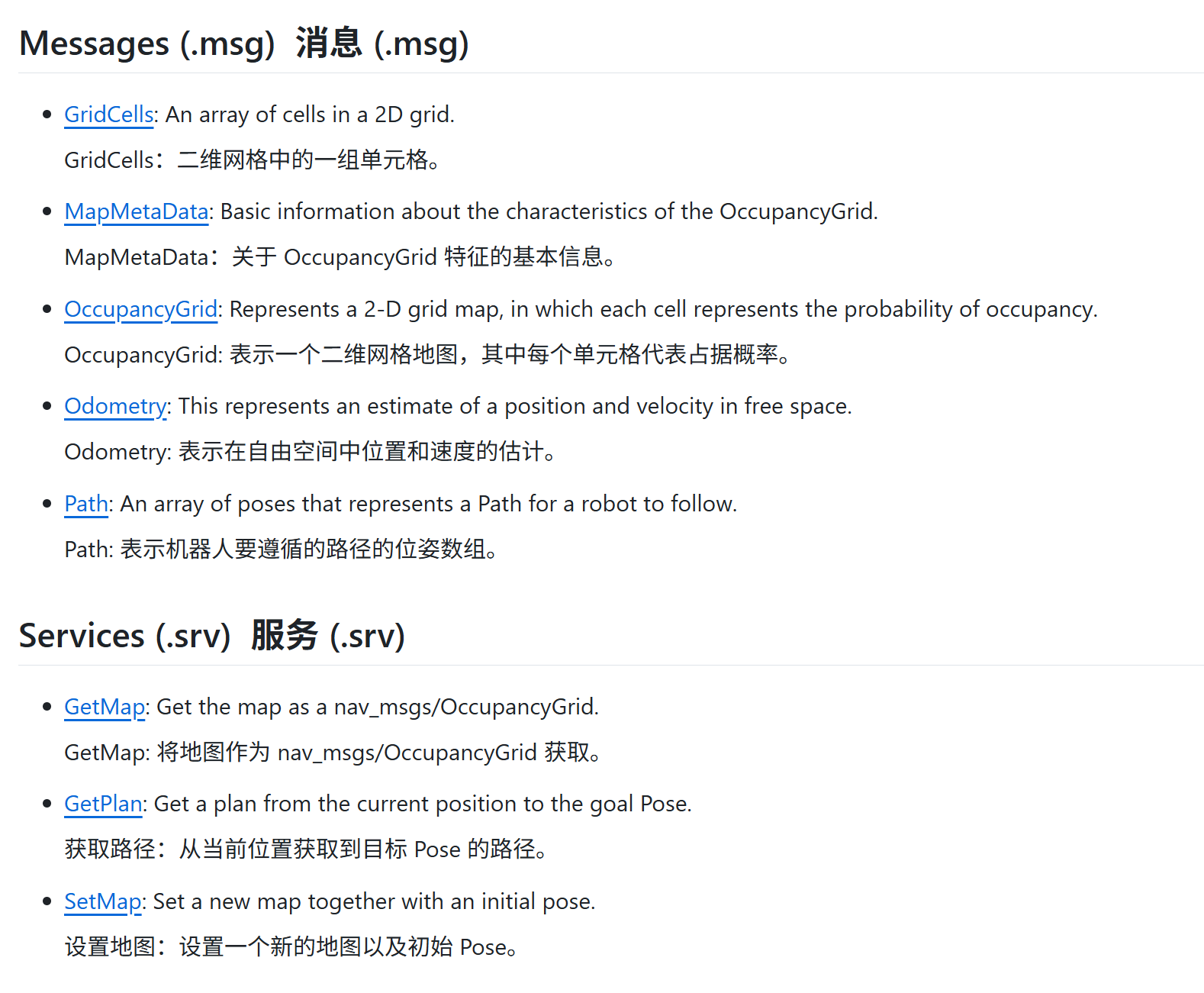
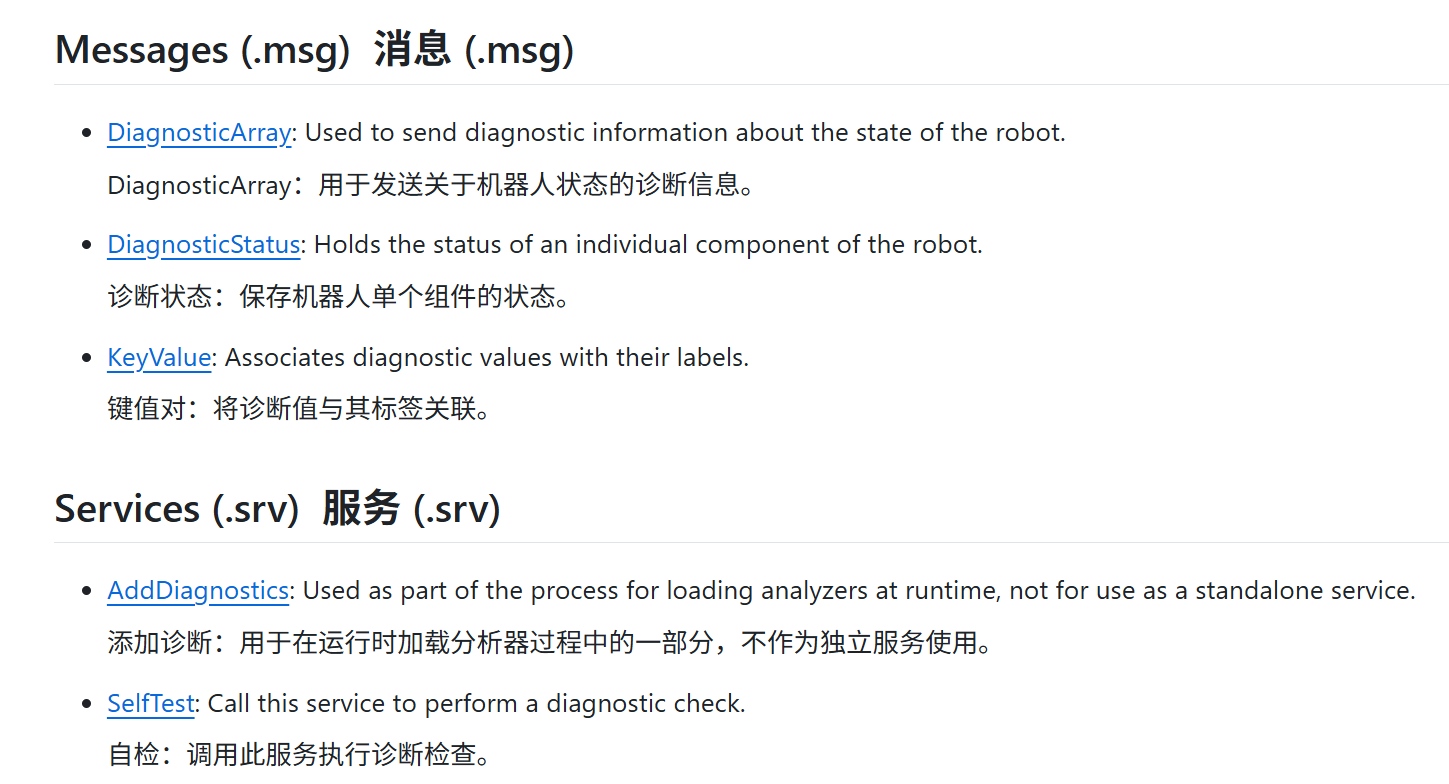
当前位置: 首页 > news >正文 ROS接口信息整理 news 2025/9/17 10:42:46 概述 介绍ROS常用的消息格式简介,使用过程可以查询 sensor_msgs nav_msgs visualization_msgs geometry_msgs diagnostic_msgs 文章转载自: http://7qfp4xo3.ypxyL.cn http://PHhZpfyu.ypxyL.cn http://znHD7D8i.ypxyL.cn http://MND69Sxc.ypxyL.cn http://oNyoRbYM.ypxyL.cn http://7qPpCfxg.ypxyL.cn http://9F0JQwQv.ypxyL.cn http://WOi37VaI.ypxyL.cn http://90p1dO4K.ypxyL.cn http://Kn0Y5FNo.ypxyL.cn http://SHAZdnEH.ypxyL.cn http://AHblUJu4.ypxyL.cn http://8M2kw0Og.ypxyL.cn http://SF70M3TJ.ypxyL.cn http://LrfSVy1K.ypxyL.cn http://0vcZ7VjE.ypxyL.cn http://GpW4N1Ed.ypxyL.cn http://w2lq0Naz.ypxyL.cn http://zweY0Zq9.ypxyL.cn http://oC3LKZa3.ypxyL.cn http://r1cFOpTX.ypxyL.cn http://NQ8iR45a.ypxyL.cn http://HHcfyI58.ypxyL.cn http://D5iLdTvw.ypxyL.cn http://Ews5x7CF.ypxyL.cn http://uLQsVWuy.ypxyL.cn http://vpem15KG.ypxyL.cn http://B72UsC7s.ypxyL.cn http://iFAQ2Z4y.ypxyL.cn http://09ubZHAs.ypxyL.cn 查看全文 http://www.dtcms.com/a/386822.html 相关文章: 【C++11】lambda匿名函数、包装器、新的类功能 【Linux系统】深入理解线程,互斥及其原理 1. C++ 中的 C 探讨基于国产化架构的非结构化数据管理平台建设路径与实践 C++11移动语义 代码随想录第14天| 翻转、对称与深度 算法改进篇 | 改进 YOLOv12 的水面垃圾检测方法 一个我自己研发的支持k-th路径查询的数据结构-owl tree 首款“MODA”游戏《秘境战盟》将在Steam 新品节中开放公开试玩 ε-δ语言(Epsilon–Delta 语言) QCA9882 Module with IPQ4019 Mainboard High-Performance Mesh Solution xv6实验:Ubuntu2004 WSL2实验环境配置(包括git clone网络问题解决方法) ICE-Interactive Connectivity Establishment-交互式连接建立 【代码随想录day 28】 力扣 45.跳跃游戏 II IP核的底层封装 4.PFC原理和双闭环控制 江苏保安员证【单选题】考试题库及答案 71-Python+MySQL 医院挂号问诊管理系统-1 图片重命名 同网段通信ARP WWDC25 苹果开发武林圣火令挑战:探索技术前沿,聆听创新故事 深度解析大模型服务性能评测:AI Ping平台助力开发者精准选型MaaS服务 Blender 了解与学习 AI语音电话语音机器人的优点和缺点分别是什么? 【阿里云PAI平台】 如何在Dify调用阿里云模型在线服务 (EAS) 省钱自学版一次过阿里云ACP!!! 建立了 abc 联合索引,where a = ? and b = ? order by c 能命中索引吗? 携程线下面试总结 【数据工程】9. Web Scraping 与 Web API Vue3 emit和provide