Angle-Based SLAM on 5G mmWave Systems: Design, Implementation, and Measurement
摘要—同步定位与地图构建 (Simultaneous localization and mapping,SLAM) 是一项关键技术,可提供用户设备 (UE) 跟踪和环境地图构建服务,从而实现感知与通信的深度融合。毫米波 (mmWave) 通信凭借其更大的带宽和天线阵列,天然地比 sub-6 GHz 通信更有利于进行精确的时延和角度测量,从而为 SLAM 提供了机遇。
然而,由于规范和硬件的限制,现有工作都未能在 5G 新空口 (NR) 标准下实现 SLAM 功能。在本研究中,我们探讨了 5G 毫米波通信系统如何在不改变收发器架构和 5G NR 标准的情况下实现态势感知。我们实现了部署基于 OFDM 的 5G NR 波形、信道带宽为 160-MHz 的 28-GHz 毫米波收发器,并实现了遵循 5G NR 的波束管理。此外,我们开发了一种高效的基于连续消除(successive cancellation-based)的角度提取方法,以从参考信号接收功率测量中获取到达角和离开角。
在角度测量的基础上,我们提出了一种纯角度 SLAM 算法来跟踪 UE 并绘制无线电环境中的特征地图。充分的实验和基于射线追踪的计算机仿真验证了,所提出的基于角度的 SLAM 可以在单个基站且无需严格时间同步的条件下,实现亚米级的定位与地图构建精度。我们的实验还揭示了许多对于 5G 毫米波通信系统中 SLAM 成功至关重要的传播特性。
索引术语—波束管理,感知与通信一体化 (ISAC),毫米波 (mmWave) 通信,同步定位与地图构建 (SLAM)。
文章目录
- B. Signal Model
- C. Problem Formulation
- III. EXPERIMENTAL HARDWARE PLATFORM
- A. Hardware Composition
- B. mmWave Phased Array and Beam Codebook
- C. Frame Structure
- IV. EXPERIMENTAL SOFTWARE PLATFORM
- A. Angle-Extract
B. Signal Model
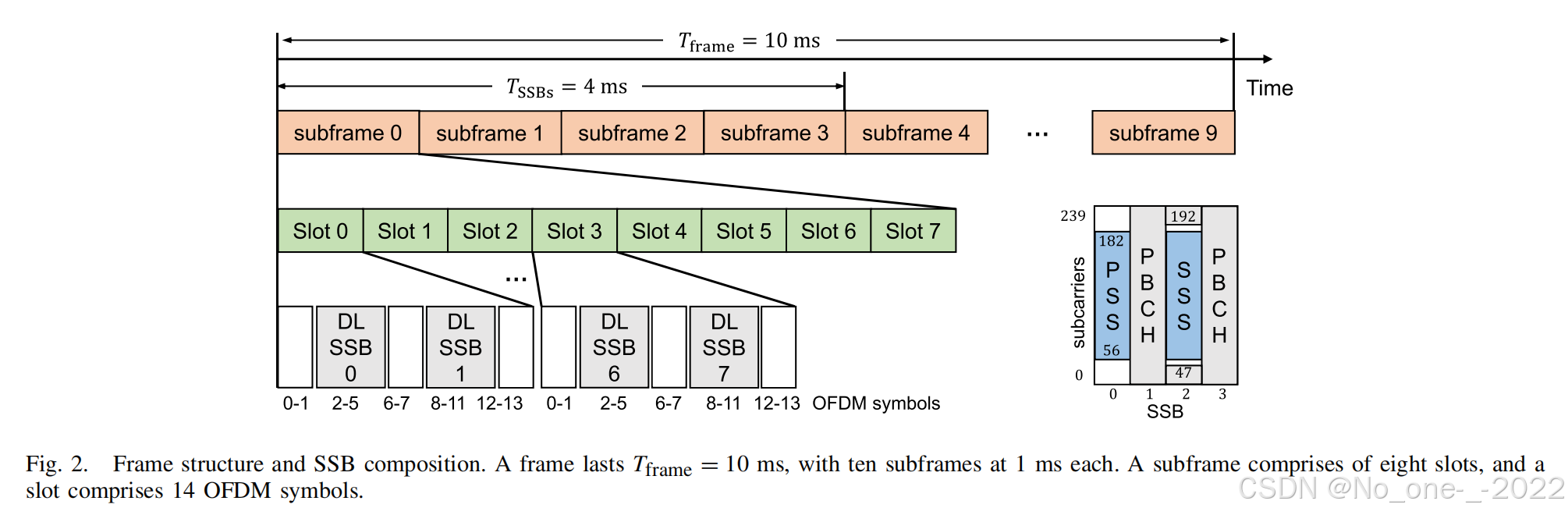
本研究中用于波束管理的 DL 测量遵循 3GPP Release 15 规范 [28]。OFDM 波形子载波间隔由 15×2γ15 × 2^γ15×2γ kHz 给出,其中 γ∈Zγ ∈ \mathbb{Z}γ∈Z 且 γ≤4γ ≤ 4γ≤4 。一个帧的持续时间为 Tframe=10T_{\text{frame}} = 10Tframe=10 ms,由十个各为 1 ms 的子帧组成。一个时隙由 14 个 OFDM 符号组成,一个子帧中的时隙数量取决于所使用的参数集,因为符号持续时间与子载波间隔成反比。本研究中使用的帧结构示例见图 2。一个同步信号块 (SSB) 在时域上由四个 OFDM 符号和在频域上由 240 个子载波组成,其包含一个主同步信号 (PSS)、一个辅同步信号 (SSS) 和一个物理广播信道 (PBCH)。PBCH 可用于估计 SSB 的 RSRP。DL 波束管理包括四个不同的操作。
-
波束扫描:每个 SSB 可以被分配到一个特定的波束方向,多个 SSB 组合成一个突发 (burst),该突发以预定的间隔和方向覆盖一个广阔的空间区域。一个 SSB 突发的最大持续时间被限制为每帧 TSSBs≤5T_{\text{SSB}_\text{s}} ≤ 5TSSBs≤5 ms。穷尽式波束扫描方法的示意见图 3。SSB 在 PA 侧使用 BTXB_{\text{TX}}BTX 个波束方向,以轮询的方式在 NSN_SNS 个活动子载波上传输。在第 iii 个波束方向上传输的同步信号表示为 xn=snaTX(θi)\mathbf{x}_n = s_n \mathbf{a}_{\text{TX}}(\theta_i)xn=snaTX(θi) ,其中 sns_nsn 表示 OFDM 符号中第 nnn 个子载波上的同步信号, i=0,...,BTX−1i = 0, ..., B_{\text{TX}} - 1i=0,...,BTX−1 ,且 aTX(⋅)\mathbf{a}_{\text{TX}}(·)aTX(⋅) 是导向矢量。PA 会周期性地传输一组 DL SSB,其周期性可以不同, ΔT={5,10,20,40,80,160}ΔT = \{5, 10, 20, 40, 80, 160\}ΔT={5,10,20,40,80,160} ms。
-
波束测量:在此过程中,UE 评估接收信号的质量。为了执行穷尽式波束扫描,首先在 UE 侧固定接收波束 0,以测量 PA 发送的 BTXB_{\text{TX}}BTX 个不同波束的 RSRP。随后,UE 侧的波束 1 到 BRX−1B_{\text{RX}} - 1BRX−1 被依次固定用于接收。由 PA 在第 iii 个波束发射并由 UE 在第 jjj 个波束由下式给出
yn,i,j=aRXH(ϕj)HnaTX(θi)sn+ϱ(4)y_{n,i,j} = \mathbf{a}_{\text{RX}}^{\text{H}}(\phi_j) \mathbf{H}_n \mathbf{a}_{\text{TX}}(\theta_i) s_n + \varrho \tag{4} yn,i,j=aRXH(ϕj)HnaTX(θi)sn+ϱ(4)
其中 j=0,...,BRX−1j = 0, ..., B_{\text{RX}} - 1j=0,...,BRX−1 , aRX(⋅)\mathbf{a}_{\text{RX}}(·)aRX(⋅) 是导向矢量, (⋅)H(·)^{\text{H}}(⋅)H 表示矢量/矩阵的共轭转置, Hn\mathbf{H}_nHn 是 UE 和 PA 之间在第 nnn 个子载波上的信道,而 ϱϱϱ 是加性高斯噪声。因此,第 (i,j)(i, j)(i,j) 个 RSRP 定义如下2^22:
ri,j=1Ns−1∣∑n=0Ns−2yn,i,jyn+1,i,j∗snsn+1∗∣(5)r_{i,j} = \frac{1}{N_s - 1} \left| \sum_{n=0}^{N_s-2} \frac{y_{n,i,j} y_{n+1,i,j}^*}{s_n s_{n+1}^*} \right| \tag{5} ri,j=Ns−11n=0∑Ns−2snsn+1∗yn,i,jyn+1,i,j∗(5)
其中 (⋅)∗(·)^*(⋅)∗ 和 ∣⋅∣|·|∣⋅∣ 分别表示复数的共轭和模。
- 波束确定:UE 根据波束测量程序中获得的测量结果来选择用于通信的合适波束。在本研究中,UE 比较 RSRP 以找到最优的发射和接收波束对。与传统的单功能系统相比,多径的有效波束对也可以在双功能 ISAC 系统中实现对传播环境的感知功能,因为多径分量信息包含了环境中无线电特征的位置和状态。在本研究中,UE 从确定的波束对中获得角度信息,第 lll 条路径的估计 AOD 和 AOA 分别表示为 θ^t,l\hat{\theta}_{t,l}θ^t,l 和 ϕ^t,l\hat{\phi}_{t,l}ϕ^t,l ,其中 l=1,...,L^tl = 1, ..., \hat{L}_tl=1,...,L^t 。我们可以定义堆叠的角度测量矢量如下:
zt=[(θ^t,1,ϕ^t,1),…,(θ^t,L^t,ϕ^t,L^t)].(6)\mathbf{z}_t = [(\hat{\theta}_{t,1}, \hat{\phi}_{t,1}), \dots, (\hat{\theta}_{t,\hat{L}_t}, \hat{\phi}_{t,\hat{L}_t})]. \tag{6} zt=[(θ^t,1,ϕ^t,1),…,(θ^t,L^t,ϕ^t,L^t)].(6)
UE 可以通过累积 TTT 次来获得一个测量序列 z1:T=[z1,…,zT]\mathbf{z}_{1:T} = [\mathbf{z}_1, \dots, \mathbf{z}_T]z1:T=[z1,…,zT] 。
- 波束上报:UE 在相应的时隙中,在初始接入过程中向 PA 传输波束质量和决策信息。
1^11我们考虑二维配置以简化算法实现和实验过程。我们的主要目标是研究 5G 毫米波通信系统如何在不改变收发器架构和 5G NR 标准的情况下实现态势感知。由于我们专注于室内实验场景,通过将 BS 和 UE 设置在相同高度,可以轻松满足二维配置。如果 UE 和 BS 处于不同高度并且可以获得三维 AOA 和 AOD,所提出的算法仍然可以通过仅使用 AOA 和 AOD 的方位角来工作。在我们未来的工作中,我们将把研究扩展到部署 UPA 的三维场景。
C. Problem Formulation
本研究旨在通过复用兼容 5G NR 的毫米波 MIMO 系统中的波束测量,来实现基于角度的 SLAM。定位和环境地图构建在 UE 侧执行。所考虑的场景涉及这样一种情况:UE 进入一个不熟悉的室内环境,由于室内 GPS 信号被阻挡,其轨迹是未知的。SLAM 的目标是基于角度测量 z1:Tz_{1:T}z1:T 来确定 PA、VA、RSP 的位置以及 UE 的轨迹。
我们假设 UE 和 PA 的初始位置是已知的,因为只有角度信息可用。UE 逐步建立相对于其出发点(初始位置)的环境几何结构。
III. EXPERIMENTAL HARDWARE PLATFORM
在本研究中,我们实现了一个毫米波 ISAC 平台,本节将描述所使用的商用设备。
A. Hardware Composition
我们的毫米波 ISAC 平台由多种组件构成,包括毫米波相控阵 (mmPSA-1808)、SDR (USRP-RIO 2974)、毫米波本振 (LO)、参考时钟节点 (reference clock node,WR LEN) 和参考时钟源 (WRS3-18)。图 4 展示了毫米波 ISAC 平台的架构。参考时钟源和节点为 PA 和 UE 提供 10-MHz 的参考时钟信号。SDR 支持 160 MHz 的带宽,并允许进行中频 (IF) 的上/下变频。毫米波 LO 模块连接到毫米波 TX/RX 头,用于上/下变频至 28-GHz 的载波频率 (CF)。然后,毫米波 TX/RX 头连接到毫米波相控阵,用于无线传输。
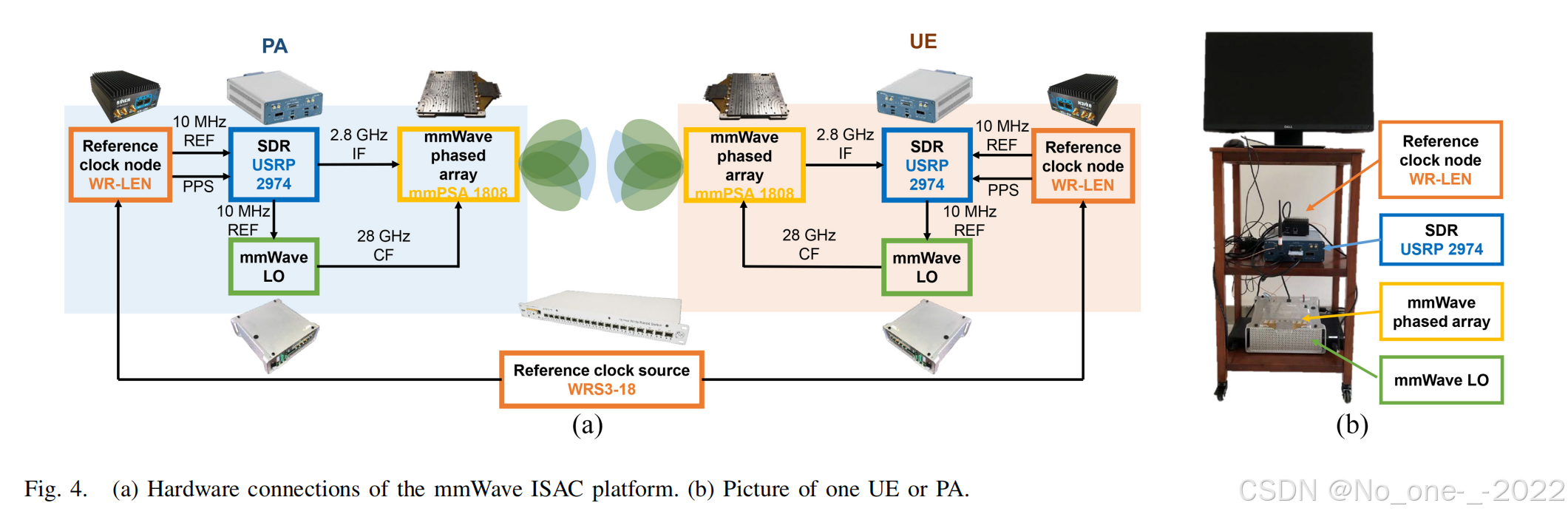
对于波束管理的 DL 测量,PA 首先使用 SDR 生成基带信号,然后将其上变频至 2.8-GHz 的中频信号。该中频信号通过毫米波 LO 上变频至 28-GHz 的载频信号,并经过模拟预编码后由毫米波相控阵发射出去。UE 侧的接收过程与 PA 侧的发射过程相反。毫米波相控阵的控制信号由 USRP-RIO 2974 的 GPIO 端口生成,以严格按照相应的 5G NR SSB 规则实现波束切换(如图 2 所示)。
B. mmWave Phased Array and Beam Codebook
毫米波相控阵是一个线性阵列,由八个天线单元和一个射频链组成。其工作频率范围为 27–29 GHz,中心频率为 28 GHz,并采用 TDD 收发器模式。天线间距为 6.3 mm (d=0.588λd = 0.588λd=0.588λ),每个天线单元连接一个 6-bit 的移相器,允许形成 26=642^6 = 6426=64 个不同的相位。相位间隔为 Δψ=360°/64=5.625°Δψ = 360°/64 = 5.625°Δψ=360°/64=5.625° ,波束切换时间小于 300 ns。
设 NTXN_{\text{TX}}NTX 和 NRXN_{\text{RX}}NRX 表示有效天线的数量。DFT 波束码本的第 βββ 个矢量为 [1,e−jβΔψ,…,e−j(N∗−1)βΔψ][1, e^{-jβΔψ}, \dots, e^{-j(N_*-1)βΔψ}][1,e−jβΔψ,…,e−j(N∗−1)βΔψ] ,其中 β=0,…,63β = 0, \dots, 63β=0,…,63 , ∗*∗ 表示 TX 或 RX。在本研究中,我们选择 BTX=BRX=8B_{\text{TX}} = B_{\text{RX}} = 8BTX=BRX=8 个波束,其相位差为 ψb=8bΔψψ_b = 8bΔψψb=8bΔψ ,其中 b=0,…,B∗−1b = 0, \dots, B_* - 1b=0,…,B∗−1 。因此,相应的 8×88 × 88×8 码本矩阵由下式给出
[111…11ej8Δψej16Δψ…ej56Δψ⋮⋮⋮⋱⋮1ej8(N∗−1)Δψej16(N∗−1)Δψ…ej56(N∗−1)Δψ].\begin{bmatrix} 1 & 1 & 1 & \dots & 1 \\ 1 & e^{j8Δψ} & e^{j16Δψ} & \dots & e^{j56Δψ} \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 1 & e^{j8(N_*-1)Δψ} & e^{j16(N_*-1)Δψ} & \dots & e^{j56(N_*-1)Δψ} \end{bmatrix}. 11⋮11ej8Δψ⋮ej8(N∗−1)Δψ1ej16Δψ⋮ej16(N∗−1)Δψ……⋱…1ej56Δψ⋮ej56(N∗−1)Δψ.

3^33由于波束间隔大于 12° (图 5),我们使用四个有效天线单元形成宽波束以覆盖目标空间。
归一化的波束方向图如图 5 所示,其中 NTX=NRX=43N_{\text{TX}} = N_{\text{RX}} = 4^3NTX=NRX=43 。我们观察到八个波束大约覆盖 120°,并且随着波束偏离天线阵列的法线方向,相邻波束之间的角度间隔逐渐增大。因此,波束方向(单位:rad) 根据图 5 给出如下:
Θ=[50.4∘⏟b=5,64.8∘⏟6,77.7∘⏟7,90∘⏟0,102.3∘⏟1,115.2∘⏟2,129.6∘⏟3,148.3∘⏟4](7)\Theta=[\underbrace{50.4^{\circ}}_{b=5}, \underbrace{64.8^{\circ}}_{6}, \underbrace{77.7^{\circ}}_{7}, \underbrace{90^{\circ}}_{0}, \underbrace{102.3^{\circ}}_{1}, \underbrace{115.2^{\circ}}_{2}, \underbrace{129.6^{\circ}}_{3}, \underbrace{148.3^{\circ}}_{4}]\tag{7} Θ=[b=550.4∘,664.8∘,777.7∘,090∘,1102.3∘,2115.2∘,3129.6∘,4148.3∘](7)
它被定义为角度字典。ΘΘΘ 中的元素按角度从小到大排序。在使用角度字典 ΘΘΘ 时,应连续补偿阵列的方向。
C. Frame Structure
本研究中使用的帧结构如图 2 所示,遵循 5G NR 标准。一个帧为 10 ms,由十个子帧组成。每个子帧包含多个时隙,每个时隙包含 14 个 OFDM 符号。FFT 长度设置为 1024,时隙 0 和 4 中的 OFDM 符号 0 的循环前缀 (CP) 长度为 136,而其余 OFDM 符号的 CP 长度为 72。子载波间隔为 120 kHz,采样率为 122.88 MSps,用于数据传输的有效子载波数设置为 792。
一个 SSB 由四个 OFDM 符号组成,如图 2 所示。第一个符号是 PSS,它是一个长度为 127 的 m 序列,第三个符号是 SSS,它是一个长度为 127 的 Gold 序列。对于子帧 0 到 3,系统在每个时隙中插入两个 SSB,从 OFDM 符号 2 和 8 开始,而其余的 OFDM 符号可用于通信。子帧 4 保留用于物理随机接入信道 (PRACH),UE 使用最优的上行链路传输波束进行波束上报。对于子帧 5 到 9,所有的 OFDM 符号都可用于通信。因此,在一个 10-ms 的帧中有 64 个 SSB,系统仅需 4 ms 即可执行一次完整的 8×88 × 88×8 波束扫描。
IV. EXPERIMENTAL SOFTWARE PLATFORM
我们使用第三节中描述的毫米波硬件平台获得 RSRP 测量值。在本节中,我们提出一种基于角度的 SLAM 算法来跟踪 UE 并在无线电环境中绘制特征地图,如图 6 所示。该算法由以下三个部分组成。
- 角度提取:我们使用一种连续消除的角度提取方法,从真实的 RSRP 测量中提取角度信息。
- 角度SLAM:我们仅使用角度测量来实现基于无线电的 BP SLAM。
- IMU校准:我们通过将 IMU 测量嵌入到基于无线电的 SLAM 中来校准对 UE 轨迹的估计。
A. Angle-Extract
我们设置了 UE 和 PA 的三个方向以覆盖总共 360°,因为一个毫米波相控阵大约覆盖 120°。波束扫描按照第 II-B1 节执行。我们获得 64 个 RSRP,记录为用于方向对 (p,q)(p, q)(p,q) 的 rp,q=[r0,0,…,r0,7,r1,0,…,r1,7,…,r7,0,…,r7,7]r_{p,q} = [r_{0,0}, \dots, r_{0,7}, r_{1,0}, \dots, r_{1,7}, \dots, r_{7,0}, \dots, r_{7,7}]rp,q=[r0,0,…,r0,7,r1,0,…,r1,7,…,r7,0,…,r7,7] ,其中 ppp 和 q=1,2,3q = 1, 2, 3q=1,2,3 。我们将向量 rp,qr_{p,q}rp,q 重塑为一个 RSRP 矩阵,如下所示:
Rp,q=[r5,5r6,5r7,5r0,5r1,5r2,5r3,5r4,5r5,6r6,6r7,6r0,6r1,6r2,6r3,6r4,6r5,7r6,7r7,7r0,7r1,7r2,7r3,7r4,7r5,0r6,0r7,0r0,0r1,0r2,0r3,0r4,0r5,1r6,1r7,1r0,1r1,1r2,1r3,1r4,1r5,2r6,2r7,2r0,2r1,2r2,2r3,2r4,2r5,3r6,3r7,3r0,3r1,3r2,3r3,3r4,3r5,4r6,4r7,4r0,4r1,4r2,4r3,4r4,4].(8)\mathbf{R}_{p,q} = \begin{bmatrix} r_{5,5} & r_{6,5} & r_{7,5} & r_{0,5} & r_{1,5} & r_{2,5} & r_{3,5} & r_{4,5} \\ r_{5,6} & r_{6,6} & r_{7,6} & r_{0,6} & r_{1,6} & r_{2,6} & r_{3,6} & r_{4,6} \\ r_{5,7} & r_{6,7} & r_{7,7} & r_{0,7} & r_{1,7} & r_{2,7} & r_{3,7} & r_{4,7} \\ r_{5,0} & r_{6,0} & r_{7,0} & r_{0,0} & r_{1,0} & r_{2,0} & r_{3,0} & r_{4,0} \\ r_{5,1} & r_{6,1} & r_{7,1} & r_{0,1} & r_{1,1} & r_{2,1} & r_{3,1} & r_{4,1} \\ r_{5,2} & r_{6,2} & r_{7,2} & r_{0,2} & r_{1,2} & r_{2,2} & r_{3,2} & r_{4,2} \\ r_{5,3} & r_{6,3} & r_{7,3} & r_{0,3} & r_{1,3} & r_{2,3} & r_{3,3} & r_{4,3} \\ r_{5,4} & r_{6,4} & r_{7,4} & r_{0,4} & r_{1,4} & r_{2,4} & r_{3,4} & r_{4,4} \end{bmatrix}. \tag{8} Rp,q=r5,5r5,6r5,7r5,0r5,1r5,2r5,3r5,4r6,5r6,6r6,7r6,0r6,1r6,2r6,3r6,4r7,5r7,6r7,7r7,0r7,1r7,2r7,3r7,4r0,5r0,6r0,7r0,0r0,1r0,2r0,3r0,4r1,5r1,6r1,7r1,0r1,1r1,2r1,3r1,4r2,5r2,6r2,7r2,0r2,1r2,2r2,3r2,4r3,5r3,6r3,7r3,0r3,1r3,2r3,3r3,4r4,5r4,6r4,7r4,0r4,1r4,2r4,3r4,4.(8)
方向补偿后,(8) 中的列和行索引与 (7) 中的索引对应相同的波束方向。通过将所有方向对组合在一起,我们得到
R=[R1,1R1,2R1,3R2,1R2,2R2,3R3,1R3,2R3,3].\mathbf{R} = \begin{bmatrix} \mathbf{R}_{1,1} & \mathbf{R}_{1,2} & \mathbf{R}_{1,3} \\ \mathbf{R}_{2,1} & \mathbf{R}_{2,2} & \mathbf{R}_{2,3} \\ \mathbf{R}_{3,1} & \mathbf{R}_{3,2} & \mathbf{R}_{3,3} \end{bmatrix}. R=R1,1R2,1R3,1R1,2R2,2R3,2R1,3R2,3R3,3.

R\mathbf{R}R 随时间变化,但我们省略了时间索引以提供简洁的表示法。我们使用非线性插值来可视化 R\mathbf{R}R 的一个实现,如图 7 所示,其中观察到了四条路径。该结果是通过第三节中描述的硬件平台和 V-A 节中描述的实验场景进行真实测量获得的。LOS 和 NLOS 1, 2, 3 的最大 RSRP 分别为 -40.5, -44.5, -47.8, 和 -48.8 dBm。LOS 和 NLOS 路径之间的能量差距为 4–8 dBm。每条路径都对应于矩阵 R\mathbf{R}R 中由于能量扩散而产生的一个支撑域。支撑域中最强元素的索引对应于该路径的角度信息。这启发我们应用一种基于连续消除的方法,从分组的 RSRP 矩阵 R\mathbf{R}R 中提取角度测量值。
我们通过一个例子来说明第一条路径的检测。首先,我们检测矩阵 R\mathbf{R}R 中最强元素的索引,记为 (r1,c1)(r_1, c_1)(r1,c1) 。经过方向补偿后,我们查询角度字典 (7) 以查找与 (r1,c1)(r_1, c_1)(r1,c1) 对应的 θ^t,1\hat{\theta}_{t,1}θ^t,1 和 ϕ^t,1\hat{\phi}_{t,1}ϕ^t,1 。然后我们确定以 (r1,c1)(r_1, c_1)(r1,c1) 为中心的该路径的支撑盒。设 S1S_1S1 表示支撑盒的半长度,并初始化 S1=1S_1 = 1S1=1 。我们定义 η~1\tilde{\eta}_1η~1 和 η1\eta_1η1 如下:
η~1=∑i=r1−S1−1r1+S1+1∑j=c1−S1−1c1+S1+1R(i,j)(9)\tilde{\eta}_1 = \sum_{i=r_1-S_1-1}^{r_1+S_1+1} \sum_{j=c_1-S_1-1}^{c_1+S_1+1} \mathbf{R}(i, j) \tag{9} η~1=i=r1−S1−1∑r1+S1+1j=c1−S1−1∑c1+S1+1R(i,j)(9)
和
η1=∑i=r1−S1r1+S1∑j=c1−S1c1+S1R(i,j)(10)\eta_1 = \sum_{i=r_1-S_1}^{r_1+S_1} \sum_{j=c_1-S_1}^{c_1+S_1} \mathbf{R}(i, j) \tag{10} η1=i=r1−S1∑r1+S1j=c1−S1∑c1+S1R(i,j)(10)
如果 (η~1−η1)/η1>ϵse(\tilde{\eta}_1 - \eta_1) / \eta_1 > \epsilon_{\text{se}}(η~1−η1)/η1>ϵse ,其中 ϵse\epsilon_{\text{se}}ϵse 表示支撑域中能量增加的速率阈值,我们增加支撑盒,令 S1=S1+1S_1 = S_1 + 1S1=S1+1 。如果增加的能量比例小于 ϵse\epsilon_{\text{se}}ϵse ,我们认为该支撑域可以覆盖当前路径。然后我们令 R~\tilde{\mathbf{R}}R~ 表示残余 RSRP 测量矩阵,并使用以下方程消除第一条路径的影响:
R~=R−M1⊙R(11)\tilde{\mathbf{R}} = \mathbf{R} - \mathbf{M}_1 \odot \mathbf{R} \tag{11} R~=R−M1⊙R(11)
其中 M1\mathbf{M}_1M1 表示第一条路径的支撑域,且
M1(i,j)={1,r1−S1≤i≤r1+S1c1−S1≤j≤c1+S10,otherwise(12)\mathbf{M}_1(i, j) = \begin{cases} 1, & r_1 - S_1 \le i \le r_1 + S_1 \\ & c_1 - S_1 \le j \le c_1 + S_1 \\ 0, & \text{otherwise} \end{cases} \tag{12} M1(i,j)=⎩⎨⎧1,0,r1−S1≤i≤r1+S1c1−S1≤j≤c1+S1otherwise(12)
其中 ⊙\odot⊙ 表示哈达玛积。令 ϵre\epsilon_{\text{re}}ϵre 表示剩余能量的阈值。如果 R~\tilde{\mathbf{R}}R~ 的剩余能量大于 ϵre\epsilon_{\text{re}}ϵre ,我们重复检测过程。当 ∑i∑jR~(i,j)≤ϵre\sum_i \sum_j \tilde{\mathbf{R}}(i, j) \le \epsilon_{\text{re}}∑i∑jR~(i,j)≤ϵre 时,算法终止。然后我们确定 L^t\hat{L}_tL^t 。鉴于 IV-B 节中介绍的 SLAM 算法可以处理漏检和虚警, L^t\hat{L}_tL^t 的轻微估计误差是可以接受的。因此,使用所提出的角度提取方法,我们可以获得 zt=[(θ^t,1,ϕ^t,1),…,(θ^t,L^t,ϕ^t,L^t)]\mathbf{z}_t = [(\hat{\theta}_{t,1}, \hat{\phi}_{t,1}), \dots, (\hat{\theta}_{t,\hat{L}_t}, \hat{\phi}_{t,\hat{L}_t})]zt=[(θ^t,1,ϕ^t,1),…,(θ^t,L^t,ϕ^t,L^t)] 。所提出的方法总结在算法 1 中。
