2025年ASOC SCI2区TOP,多类别教学优化算法+多修剪机器人与多施肥无人机协同任务分配,深度解析+性能实测
目录
- 1.摘要
- 2.问题描述和建模
- 3.多类别教学优化算法
- 4.结果展示
- 5.参考文献
- 6.代码获取
- 7.算法辅导·应用定制·读者交流
1.摘要
智能农业机器人与无人机的蓬勃发展显著推动了智慧农业的进程,本文针对智慧果园中多修剪机器人与多施肥无人机的协同任务分配问题(MRMDTA)展开研究,旨在最小化机器人-无人机系统的总作业完成时间。通过构建精确数学模型,本文提出了一种多类别教学优化算法(MTLBO),该算法采用多班级协同教学机制,每个班级由一名教师与一名助教共同指导,有效提升异构群体内的学习效率。算法采用层次分明的六阶段优化框架:初始化阶段引入两种基于贪婪插入的启发式策略;分班阶段为每个班级分配教师与助教;训练阶段设计五种启发式搜索算子;学习阶段提出重组交叉算子实现师生知识传递;协作阶段建立临时班级促进跨组交流;毕业阶段淘汰搜索潜力不足的个体。
2.问题描述和建模
问题描述
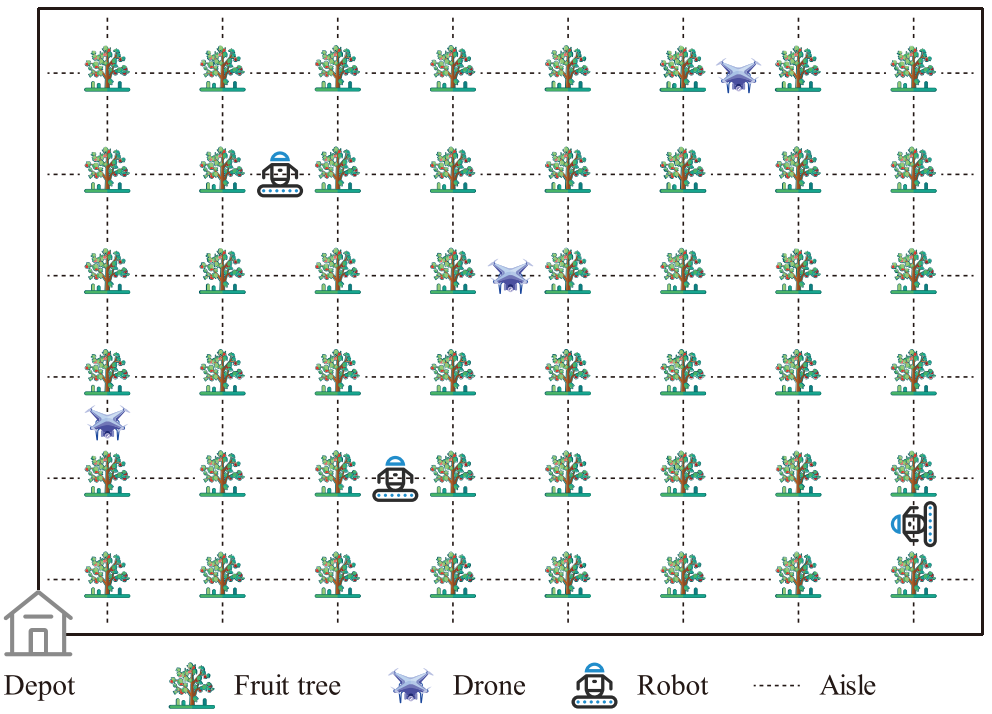
智慧果园系统包含mmm台修剪机器人、lll架施肥无人机和nnn个果树任务点(需修剪与施肥)。每个任务点需分配一台修剪机器人和一架施肥无人机协同作业,且修剪必须先于施肥完成,否则无人机需悬停等待。所有设备从仓库同步出发,依次完成指派任务后返回。模型基于以下假设:(1) 设备始终正常运行;(2) 移动速度恒定;(3) 任务环境静态,无新增任务点。
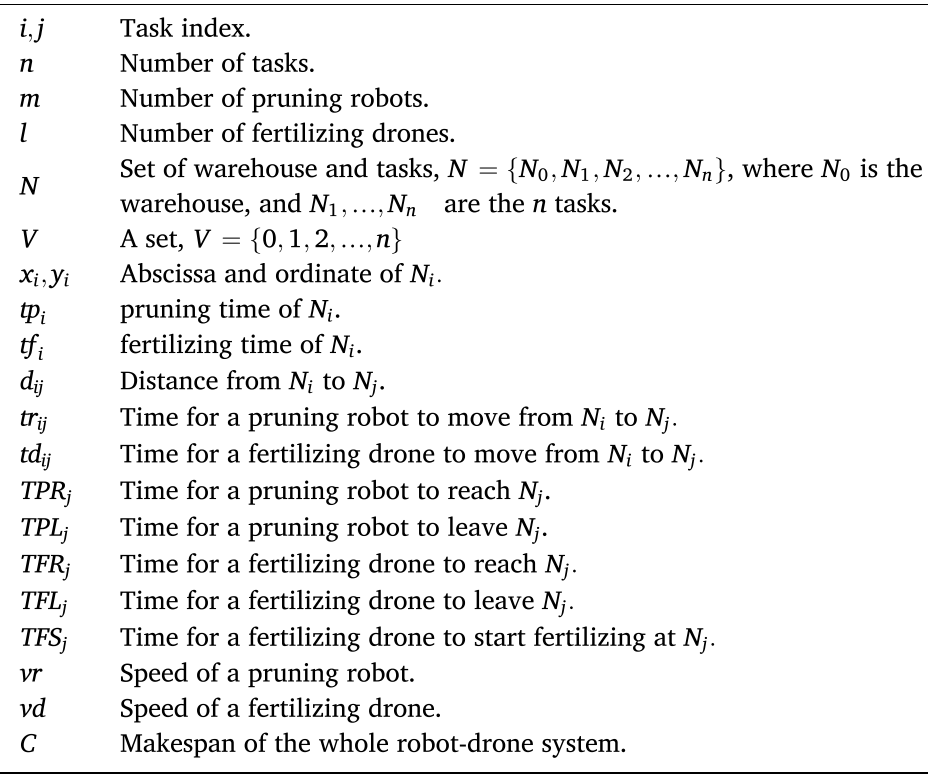
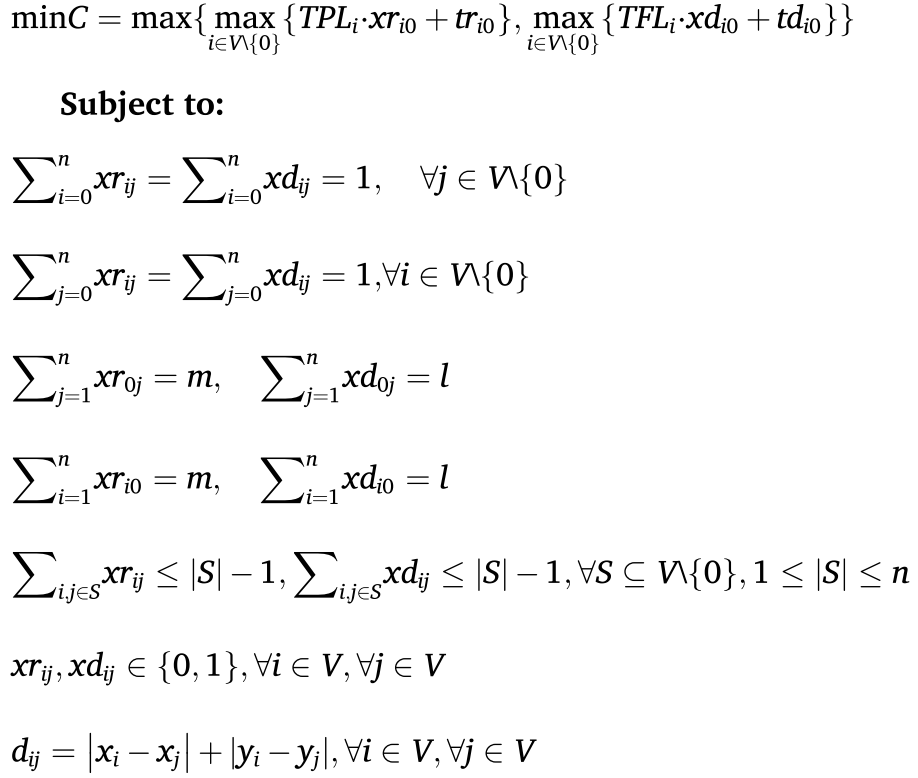
问题模型

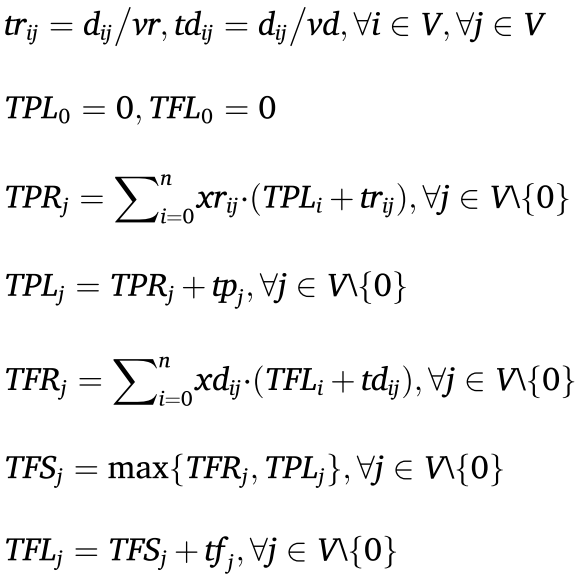
3.多类别教学优化算法
解决方案表示
假设将nnn个任务分配给mmm台修剪机器人和lll架施肥无人机,则解可表示为由m+lm+lm+l个序列组成的序列组,记为{πr,πd}={π1r,π2r,…,πmr,π1d,π2d,…,πld}\{\pi^r,\pi^d\}=\{\pi_1^r,\pi_2^r,\ldots,\pi_m^r,\pi_1^d,\pi_2^d,\ldots,\pi_l^d\}{πr,πd}={π1r,π2r,…,πmr,π1d,π2d,…,πld} ,其中πpr,p=1,2,…m\pi_p^r,p=1,2,\ldots mπpr,p=1,2,…m和πqd,q=1,2,…l\pi_q^d,q=1,2,\ldots lπqd,q=1,2,…l分别表示分配给修剪机器人ppp和施肥无人机qqq的任务序列。
实例解可表示为{π1r,π2r,π1d,π2d}={(1,4,3),(2,5),(1,5,3),(2,4)}\{\pi_1^r,\pi_2^r,\pi_1^d,\pi_2^d\}=\{(1,4,3),(2,5),(1,5,3),(2,4)\}{π1r,π2r,π1d,π2d}={(1,4,3),(2,5),(1,5,3),(2,4)}。
MTLBO算法可行性保障机制
MTLBO算法通过三重机制确保解的可行性:首先采用可行性初始化方法,生成完全满足任务分配、序列与时间约束的初始解;设计保可行性搜索算子,在进化过程中始终保持任务依赖关系与资源约束;通过交叉操作中的两步修复机制,有效消除不可行解,整个优化过程始终在可行解空间内进行。
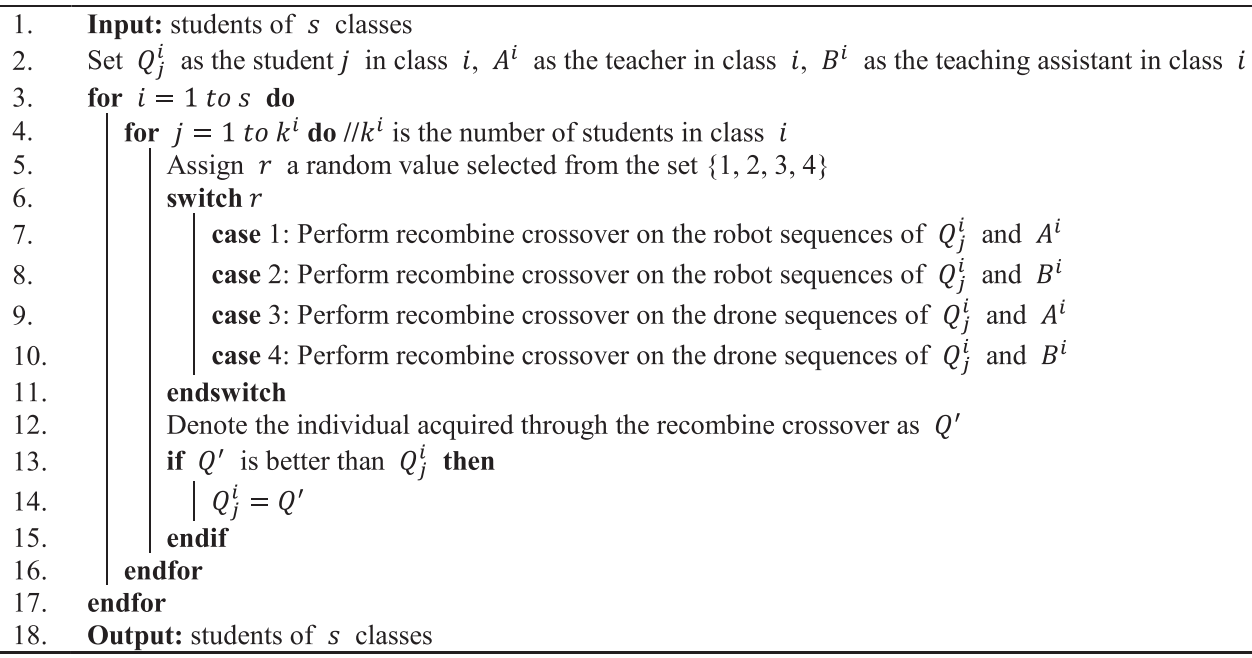
启发式初始化阶段
MTLBO算法采用两种启发式初始化方法生成高质量初始解:机器人优先插入法先为机器人分配任务,再按修剪完成时间排序为无人机插入任务,减少悬停等待;无人机优先插入法则先分配无人机任务,再按施肥完成时间排序优化机器人任务分配。两种方法分别从不同方向优化系统完工时间。种群初始化时,前两个个体由这两种启发式方法生成,其余个体随机生成,兼顾解的质量与多样性。
MTLBO算法通过五种针对性启发式搜索算子提升其指导能力,加速算法收敛,这些算子基于系统完工时间C的五个组成部分设计:
- 机器人移动时间优化(TS1):从完工时间最大/最小的机器人中选取移动时间最长的任务,转移至最优位置;
- 机器人修剪时间优化(TS2):转移累积修剪时间最长任务至修剪时间最小的机器人序列;
- 无人机移动时间优化(TS3):转移移动时间最长任务至完工时间最小的无人机序列;
- 无人机悬停时间优化(TS4):针对悬停时间最长任务进行转移,减少系统瓶颈;
- 无人机施肥时间优化(TS5):转移累积施肥时间最长任务至施肥时间最小的无人机序列。
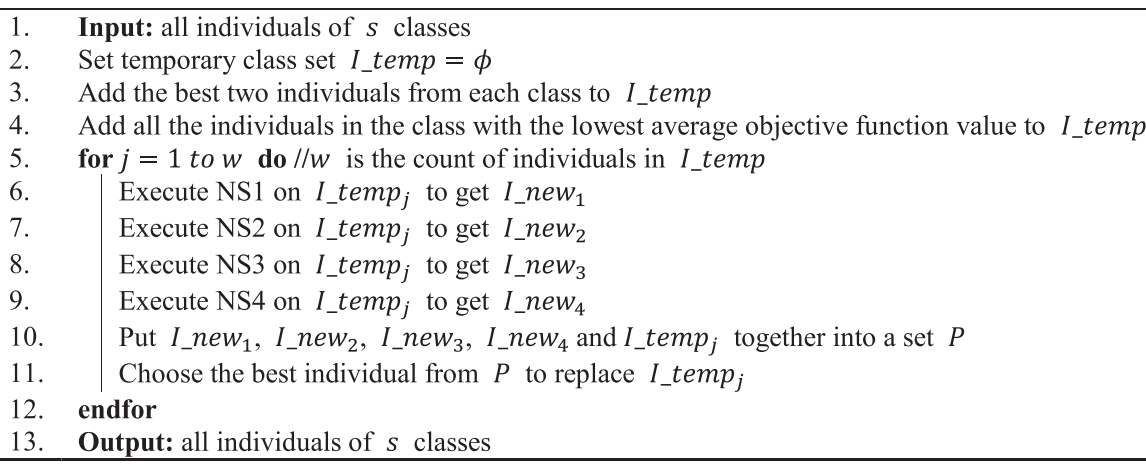
班级协作阶段
为促进跨班级协作,算法设立临时班级,由每个班级中最优的两个个体及平均解表现最佳班级的全部个体组成。对临时班级中的每个个体,依次采用四种多邻域搜索算子进行优化:
-
NS1:随机选择同一机器或无人机内的两个任务,交换其位置;
-
NS2:随机选择两个不同机器或无人机中的任务,互换其位置;
-
NS3:随机选择同一机器或无人机内的两个任务,将一任务插入另一任务之后;
-
NS4:随机选择两个不同机器或无人机中的任务,将一任务插入另一设备序列的指定任务之后。
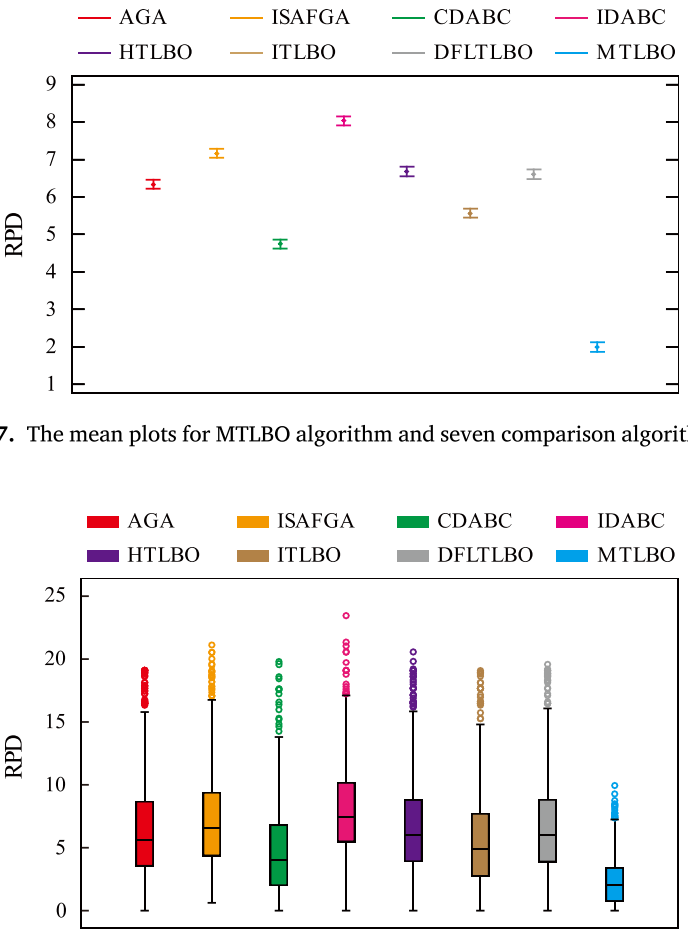
4.结果展示
5.参考文献
[1] Wang C H, Zhang W, Pan Q K, et al. Multi-pruning-robot and multi-fertilizing-drone collaborative task assignment using multi-class teaching-learning-based optimization[J]. Applied Soft Computing, 2025: 113591.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx