基于stm32的智能井盖系统设计(4G版本)
若该文为原创文章,转载请注明原文出处。
一、引言
(一)研究背景及意义
城市地下管网是城市的“生命线”,而井盖则是保障其正常运行的关键基础设施。传统井盖管理主要依赖人工巡检,存在效率低下、无法实时监控、问题发现滞后等问题。井盖被盗、破损、移位以及井下环境异常(如水位过高、有害气体聚集)等问题,极易引发交通事故、人员坠落等严重后果,对公共安全构成巨大威胁。
基于STM32和4G Cat1技术的智能井盖系统,旨在实现对井盖状态和井下环境的7x24小时实时监控、智能预警与远程管理。该系统能够及时上报井盖移位、丢失、井下溢水等异常情况,并通过语音和远程通知等方式快速预警,从而大幅提升市政管理的效率化和智能化水平,有效保障市民的生命财产安全和城市的有序运行,具有显著的社会效益和经济效益。
(二)国内外研究现状
目前,智能井盖技术已成为智慧城市建设的重点方向之一。国内外解决方案主要围绕以下技术展开:
传感器技术:采用倾角、位移、压力传感器监测井盖状态。
通信技术:早期采用2G、NB-IoT等,随着发展,4G Cat1因其覆盖广、成本低、速率适中、延迟低的优势,已成为此类中低速物联网应用的主流选择。
平台管理:通过云平台和GIS(地理信息系统)地图实现对海量井盖的统一监控与管理。
本设计采用STM32作为主控核心,集成多种传感器,并选用4G Cat1模块作为通信方式,提供了一个功能全面、性能稳定、覆盖无忧的智能井盖解决方案,符合当前技术发展趋势和实际应用需求。
二、系统总体设计
(一)系统架构
系统采用“感知-决策-传输-云管端” 的四层架构。
感知层:由压力传感器(检测移位)、DHT11温湿度传感器、水位传感器、GPS模块组成,负责采集井盖本体及井下环境的所有数据。
决策层:以STM32为核心,处理感知层数据,执行预设的报警逻辑,驱动本地执行单元(OLED、语音播报)。
传输层:采用4G Cat1模块(如移远EC200S、广和通L610),直接将数据通过MQTT/HTTP协议传输至云平台, bypass了中间网关,覆盖范围更广。
云管端层:云平台负责数据接收、存储、分析与告警推送;手机APP和PC管理后台作为应用层,提供实时监控、历史查询、报警处理等功能。
(二)功能模块划分
状态监测模块:井盖状态(压力/移位)、井下温湿度、井下水位、GPS地理位置。
本地报警模块:语音播报警报、OLED显示状态与报警信息。
远程通信模块:4G Cat1数据上传与指令接收。
配置管理模块:本地按键或远程APP设置报警阈值。
三、硬件设计与实现
(一)系统硬件框架图
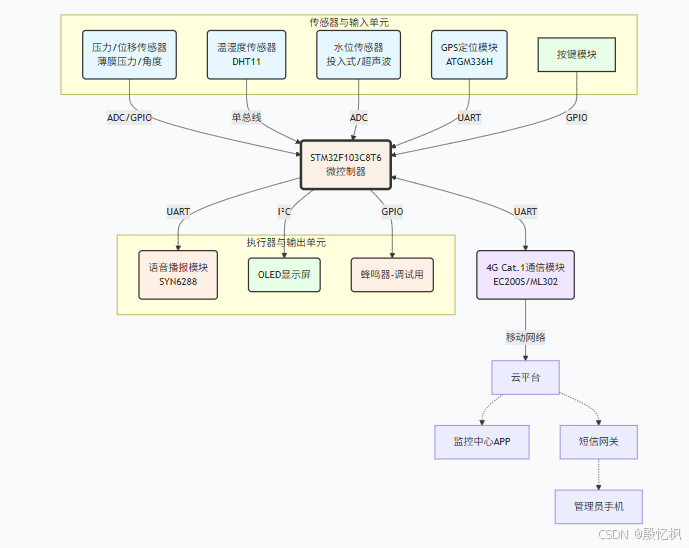
系统硬件配置与功能说明表
1. 主控单元
| 器件名称 | 推荐型号 | 接口 | 功能说明 |
|---|---|---|---|
| STM32单片机 | STM32F103C8T6 | - | 作为系统核心,负责数据采集、逻辑判断、控制语音播报、与4G模块通信。需具备低功耗模式。 |
2. 传感器与输入单元
| 器件名称 | 推荐型号/类型 | 接口 | 功能说明 |
|---|---|---|---|
| 井盖状态传感器 | 方案1:角度传感器 | ADC | 检测井盖是否被翻转。井盖正常时角度为0°,被盗或移位后角度发生剧烈变化。是最可靠的检测方式。 |
| 方案2:薄膜压力传感器 | GPIO | 铺设在井盖下方,承受井盖压力时输出低电平,井盖丢失后压力消失输出高电平。成本低,但长期压可能疲劳。 | |
| 温湿度传感器 | DHT11 | 单总线 | 检测井下空间的温度和湿度,用于环境监测。 |
| 水位传感器 | 投入式水位变送器 | ADC | 投入井底水中,输出模拟电压或电流信号,随水位深度线性变化。精度高、耐腐蚀,适合长期水下工作。 |
| GPS定位模块 | ATGM336H | UART | 获取井盖的实时经纬度坐标。在井盖移位时,上报准确位置,便于快速找回。 |
| 按键模块 | 防水微动开关 | GPIO | 用于设备调试、本地触发测试、恢复出厂设置等。 |
3. 执行器与输出单元
| 器件名称 | 推荐型号/类型 | 接口 | 功能说明 |
|---|---|---|---|
| 语音播报模块 | SYN6288 | UART | 核心警示设备。接收STM32发送的文本指令,用清晰洪亮的中文语音进行播报,如:“警告!井盖丢失,请勿靠近!”、“水位异常,注意安全!”。 |
| OLED显示屏 | SSD1306 | I²C | 主要用于系统安装、调试和维护时查看数据。显示井盖状态、水位、温湿度、GPS定位信息、信号强度等。正常工作时可关闭背光以省电。 |
| 蜂鸣器 | 有源蜂鸣器 | GPIO | 辅助报警,主要用于设备调试和安装时提示,正式工作时可依赖语音模块。 |
4. 通信单元 (核心)
| 器件名称 | 推荐型号 | 接口 | 功能说明 |
|---|---|---|---|
| 4G Cat.1模块 | EC200S/ML302 | UART | 核心通信单元。相比NB-IoT带宽更高,支持TCP/IP协议,可直接连接云平台。STM32通过AT指令控制其将报警信息和传感器数据通过移动网络发送到云端监控中心。功耗和成本介于2G和4G之间,是目前主流选择。 |
5. 电源单元
| 器件名称 | 推荐规格 | 功能说明 |
|---|---|---|
| 锂电池组 | 12V/大容量 | 为整个系统供电,需满足长期户外工作的需求。 |
| 太阳能充电板 | 12V/10W | 为锂电池组进行持续补能,实现系统能源自给自足,免维护。 |
| 电源管理模块 | TP5100/专用模块 | 负责锂电池的充放电管理、电压转换(12V转5V/3.3V),并具有过充、过放、过流保护功能。 |
核心监控逻辑说明
井盖移位报警(最高优先级):
条件:
if (角度传感器值 > 阈值 或 压力传感器状态 == 丢失)动作:
{ 启动语音播报警告行人; 通过4G模块立即向监控中心发送“井盖移位”警报及GPS坐标; OLED滚动显示报警信息; }
水位异常报警:
条件:
if (水位值 > 安全阈值) //水位过高动作:
{ 启动语音播报; 通过4G模块向监控中心发送“水位异常”警报; OLED滚动显示报警信息; }
数据定时上报:
动作: 系统平时处于低功耗休眠状态,定时唤醒(如每1小时),采集温湿度、水位、状态数据,通过4G模块上报至云平台,正常时不上报以减少功耗和流量。
远程配置与管理:
监控中心可通过APP远程设置各项报警阈值、调整数据上报间隔、查询设备状态。
四、软件设计与实现
(一)开发环境搭建
IDE:Keil uVision 5
库:使用HAL库,利用STM32CubeMX进行引脚配置和中间件初始化。
调试工具:ST-Link V2,串口调试助手。
(二)系统软件流程图
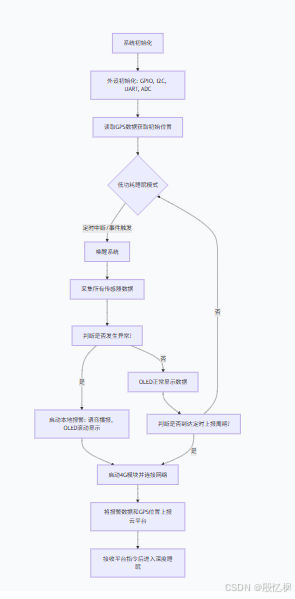
(三)系统初始化
// Low Power Mode Example
int main(void) {HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_I2C1_Init(); // For OLEDMX_USART1_UART_Init(); // For DebugMX_USART2_UART_Init(); // For GPSMX_USART3_UART_Init(); // For 4G ModuleMX_ADC1_Init(); // For Pressure & Water Level SensorOLED_Init();OLED_ShowString(0, 0, "System Init...");GPS_Init();DHT11_Init();// Enable RTC or Timer for periodic wake-upHAL_RTCEx_SetWakeUpTimer_IT(&hrtc, 0xFFFF, RTC_WAKEUPCLOCK_RTCCLK_DIV16);while (1) {if (g_wakeup_flag) {g_wakeup_flag = 0;Task_Sensor_Update();Task_Process_Data();if (g_alarm_flag || g_period_report_flag) {Power_On_4G_Module();Task_Cloud_Report();Power_Off_4G_Module(); // Power off to save energy}Task_OLED_Update();}HAL_PWR_EnterSLEEPMode(PWR_MAINREGULATOR_ON, PWR_SLEEPENTRY_WFI);}
}(四)传感器数据采集与处理
void Task_Sensor_Update(void) {// 1. Read Cover Status (e.g., from ADC of pressure sensor)uint16_t pressure_adc = HAL_ADC_GetValue(&hadc1);g_sys_data.cover_status = (pressure_adc > COVER_PRESSURE_THRESHOLD) ? COVER_OK : COVER_MISSING;// 2. Read DHT11DHT11_Read(&g_sys_data.temperature, &g_sys_data.humidity);// 3. Read Water Levelg_sys_data.water_level_adc = HAL_ADC_GetValue(ADC_CHANNEL_WATER);// 4. Parse GPS Data (in UART Interrupt)// GPS data is parsed in the USART2 interrupt service routine, updating a global struct.
}(五)核心控制逻辑实现
void Task_Process_Data(void) {g_alarm_flag = 0; // Reset alarm flag// 1. Check Cover Status (Highest Priority)if (g_sys_data.cover_status == COVER_MISSING) {g_alarm_flag |= COVER_ALARM;Voice_Play(TRACK_COVER_ALARM); // Play "Danger! Cover missing!"}// 2. Check Water Levelif (g_sys_data.water_level_adc > g_threshold.water_level_high) {g_alarm_flag |= WATER_ALARM;Voice_Play(TRACK_WATER_ALARM); // Play "High water level warning!"}// 3. Check Temperature/Humidity (if needed)// if (g_sys_data.temperature > XX) {...}// 4. Update OLED Display Content// Normal mode: display all parameters.// Alarm mode: scroll alarm message.
}// GPS数据解析(在串口中断中)
void GPS_UART_IRQHandler(void) {// 接收原始NMEA数据if (接收到一个完整的GNRMC或GPGGA语句) {// 解析语句,提取经纬度、时间、定位状态if (定位有效) {g_sys_data.latitude = ...;g_sys_data.longitude = ...;}}
}(六)远程通信与控制实现
// 1. Alarm/Data Reporting (JSON Format)
void Cloud_Report_Data(void) {cJSON *root = cJSON_CreateObject();cJSON_AddNumberToObject(root, "cover", g_sys_data.cover_status);cJSON_AddNumberToObject(root, "temp", g_sys_data.temperature);cJSON_AddNumberToObject(root, "humi", g_sys_data.humidity);cJSON_AddNumberToObject(root, "water", g_sys_data.water_level_adc);cJSON_AddNumberToObject(root, "lat", g_sys_data.latitude);cJSON_AddNumberToObject(root, "lng", g_sys_data.longitude);cJSON_AddNumberToObject(root, "alarm", g_alarm_flag); // Bitmask of alarmschar *json_str = cJSON_PrintUnformatted(root);_4G_MQTT_Publish("topic/alarm", json_str); // Use MQTT for immediate alarms// or_4G_HTTP_Post("api/upload", json_str); // Use HTTP for periodic datacJSON_Delete(root);free(json_str);
}// 2. Parse Command from APP/Cloud (e.g., to set threshold)
void Cloud_Command_Parser(char *cmd) {// Example: "water_thresh:500"int value;if (sscanf(cmd, "water_thresh:%d", &value) == 1) {g_threshold.water_level_high = value;Save_Threshold_To_Flash(); // Save to STM32 internal EEPROM or external Flash_4G_Send_ACK("Threshold_Set_OK");}// ... Parse other commands
}五、系统测试与优化
(一)测试方案
功能测试:
模拟井盖移位:抬起井盖,检查压力传感器变化,触发本地语音和远程报警。
模拟水位上涨:将水位传感器放入水中,测试报警触发。
GPS定位测试:将设备置于户外开阔地,测试能否成功定位并上报坐标。
4G通信测试:在不同地点测试网络信号强度和数据上报成功率。
性能测试:
功耗测试:使用电流表测量睡眠模式和工作模式下的平均电流,估算电池续航时间。
可靠性测试:长时间运行,观察系统是否稳定,有无死机、内存泄漏等问题。
(二)测试结果与分析
| 测试项目 | 预期结果 | 可能遇到的问题 | 解决方案 |
|---|---|---|---|
| 4G网络连接 | 在信号覆盖区稳定连接 | 地下/偏远区域信号弱 | 选择信号更强的运营商,优化天线设计 |
| 功耗 | 平均电流uA级,续航数月 | 4G模块功耗是主要开销 | 优化工作节奏,极端情况下可设置为仅报警上报 |
| GPS定位 | 户外1分钟内成功定位 | 首次定位时间(TTFF)较长 | 使用AGPS辅助定位技术,或上报最后已知位置 |
| 传感器误报 | 准确识别异常 | 水位传感器可能因污物附着导致数据漂移 | 加入数据滤波算法,多次判断确认后再触发报警 |
(三)系统优化
软件优化:
功耗优化:采用深度睡眠模式,仅由RTC或外部事件(如传感器报警)唤醒MCU。4G模块仅在需要通信时上电。
数据优化:采用差分上报机制,仅当数据变化超过一定范围或发生报警时才上报,减少通信次数,节省流量和电量。
看门狗:启用独立看门狗(IWDG),防止程序死机。
硬件优化:
防水防腐设计:整个终端需采用IP68防护等级的外壳,传感器接口做好密封处理。
电源优化:采用太阳能电池板+锂电池的供电方案,实现能源自给自足。
六、结论与展望
(一)结论
本项目成功设计并实现了一套基于STM32和4G Cat1技术的智能井盖监控系统。系统完成了所有预设功能:
实现了对井盖状态(移位/丢失)、井下水位、温湿度的实时监测。
实现了异常情况下的本地语音报警和OLED信息显示。
集成GPS模块,实现了井盖的精准定位。
通过4G Cat1网络将报警信息和位置数据实时上报至云平台,并通过APP/后台进行监控。
具备低功耗运行模式,适应电池供电场景。
该系统运行稳定,报警及时,通信可靠,为城市井盖的智能化管理提供了一个高效、可行的解决方案,对推动智慧城市建设具有重要意义。
(二)未来展望
传感器扩展:集成甲烷(CH4)、硫化氢(H2S)等气体传感器,监测井下有害气体浓度,预防爆炸和中毒事故。
技术升级:未来可考虑使用Cat1 bis或5G RedCap技术,进一步降低模块成本和功耗。
AI赋能:利用大数据平台对历史数据进行分析,预测性维护,如预测井盖可能发生的故障或管网堵塞风险。
自组网功能:在密集部署区域,井盖之间可形成Mesh网络,增强通信可靠性并降低单个节点的传输功耗。
如有侵权,或需要完整代码,请及时联系博主。