【3DV 进阶-3】Hunyuan3D2.1 训练代码详细理解之-Flow matching 训练 loss 详解
- 【3D 入门-指标篇上】3D 网格重建评估指标详解与通俗比喻
- 【3D 入门-指标篇下】 3D重建评估指标对比-附实现代码
- 【3D 入门-3】常见 3D 格式对比,.glb / .obj / .stl / .ply
- 【3D 入门-4】trimesh 极速上手之 3D Mesh 数据结构解析(Vertices / Faces)
- 【3D 入门-5】trimesh 极速上手之 Hunyuan3D-2.1 中的“非水密网格“处理流程
- 【3D 入门-6】大白话解释 SDF(Signed Distance Field) 和 Marching Cube 算法
- 【3D 入门-7】理解 SDF(Signed Distance Field) 不是什么?与相对坐标的区别
- 【3D 入门-8】通过 Hunyuan3D2.1 的代码来理解 SDF 和 marching cubes(上)
- 【3D 入门-9】通过 Hunyuan3D2.1 的代码来理解 SDF 和 marching cubes(下)
- 【3DV 进阶-1】Hunyuan3D2.1 训练代码详细理解上-模型调用流程
- 【3DV 进阶-2】Hunyuan3D2.1 训练代码详细理解下-数据读取流程
- Rectified Flow 相关:【整流模型(一) / 扩散模型(十一)】SD1.5 / SDXL / SD3 / Flux 整体区别梳理汇总,扩散与整流(Rectified Flow)的区别
- Loss 计算的关键代码位于 /pathHunyuan3D-2.1/hy3dshape/hy3dshape/models/diffusion/transport/transport.py
总结下训练目标,和图像生成类似:
- 可以“宽松地”理解为:denoiser 在潜变量空间学习“如何从噪声生成 latent(latent 由 surface 通过 ShapeVAE 编码而来)”,从而在采样时重建/生成这个 latent。
- 严格来说,它不是直接对 latent 做回归重建,而是用 Flow matching 的训练目标,学习噪声→数据路径上的“速度/噪声”(vector field/score)。
- 监督信号由 VAE 编码得到的 z 和随机时间 t 决定的目标速度/噪声给出。
具体的代码理解如下:
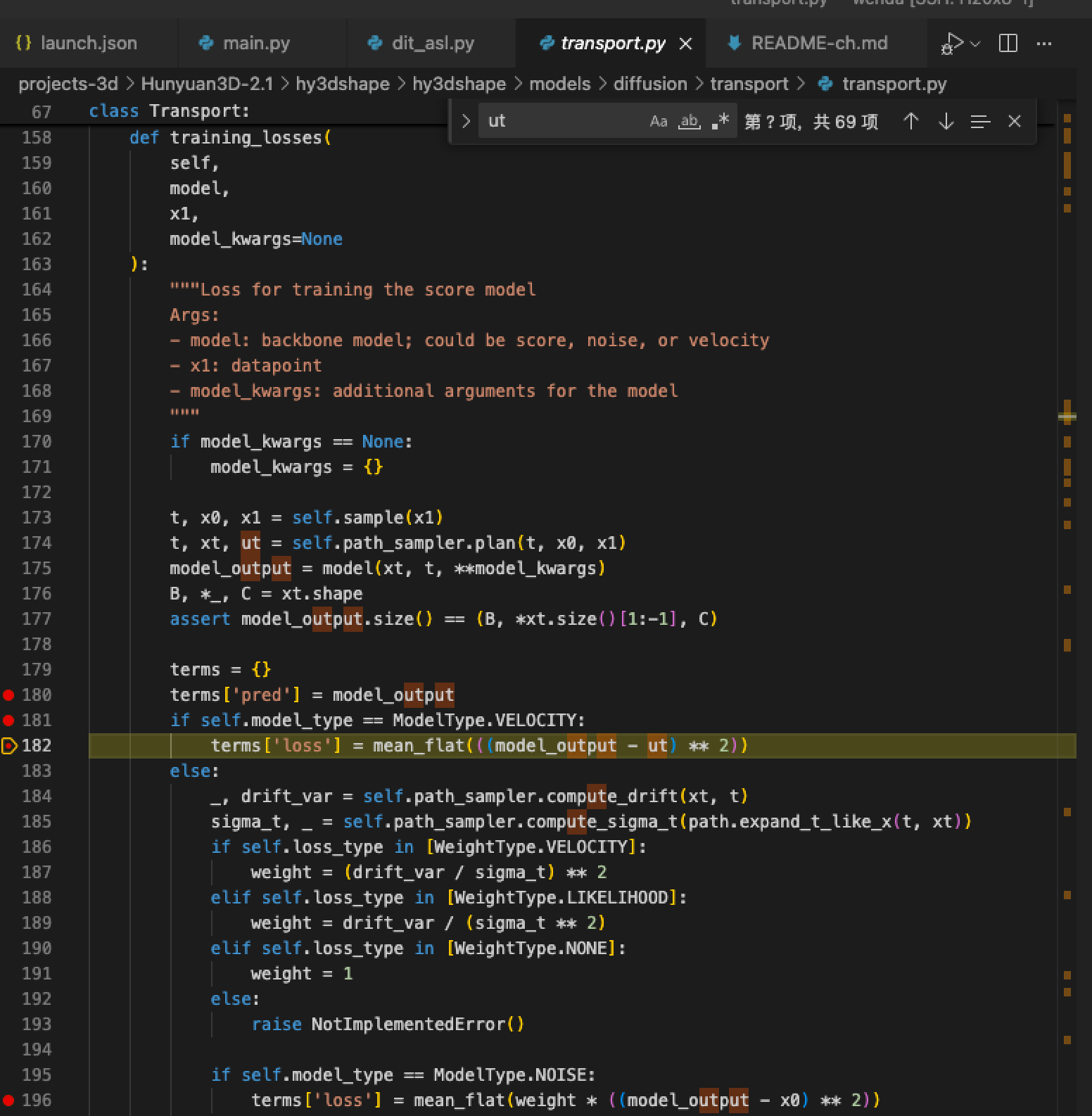
training_losses
- 输入是 x1(lantent)
- 关键步骤是 self.sample(x1) 和 self.path_sampler.plan
- 最后通过对 **model_output 和 ut (GT)**之前的 MSE loss (均方误差)
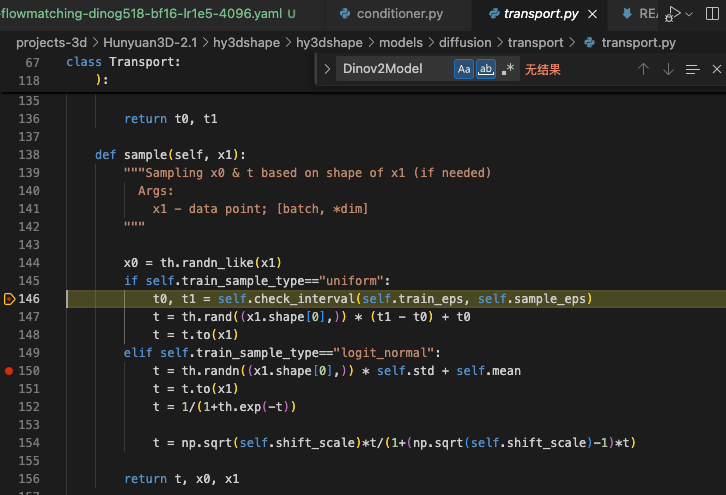
sample(x1)
-
x1(数据点): 目标分布的样本,形状与模型输出一致。在本项目里就是 VAE 对 surface 编码得到的潜变量 latents(即要“生成/重建”的对象)。
-
x0(噪声起点): 与 x1 同形状的标准正态随机张量 th.randn_like(x1),代表从高斯先验出发的“源分布”。
-
t(时间标量): 每个样本一个标量,表示在“从 x0 走到 x1”的路径上的位置。
-
采样方式:
- uniform: 在 (t0, t1) 上均匀采样,区间由 check_interval(self.train_eps, self.sample_eps) 决定,以避开端点的数值不稳定。
- logit_normal: 先按高斯采样再经 sigmo id、shift_scale 映射,得到偏向某些时间段的分布。
形状为 [batch],每个样本一个 t。 - 返回的是 (t, x0, x1);随后用路径规划器得到中间状态和监督目标(速度/向量场)
self.path_sampler.plan(t, x0, x1)
- x1(数据样本): 真实分布的样本。在本项目中是 VAE 对 surface 编码得到的 latent,作为“目标端”。
- x0(噪声起点): 与 x1 同形状的标准高斯噪声,作为“源端”,从这里出发要被运输到 x1。
- t(时间标量): 每个样本一个 t∈(0,1),表示在“从 x0 到 x1”的路径上的位置。训练时随机采样覆盖全时刻。
- xt(路径上的点): 在给定 t 下,路径定义(Linear/VP/GVP)算出的中间状态,模型的输入之一。
- ut(目标速度/向量场): 在给定路径与 t 下的“真速度”/“所需运输方向”。例如 Linear 时 ut = x1 - x0(与 t 无关)。
- model_output: 模型对给定 (xt, t, cond) 预测的速度(或等价的噪声/score 的重参数化)。
path_sampler.plan 代码具体做了什么?
- 路径类型: 由配置的
path_type决定,映射见Transport内部(Linear→ICPlan,VP→VPCPlan,GVP→GVPCPlan)。核心接口一致:返回(t, xt, ut)。 - 以 Linear 路径
ICPlan为例(最直观):- 将标量
t广播到x的形状维度以便逐元素计算:
- 将标量
def expand_t_like_x(t, x):dims = [1] * (len(x.size()) - 1)t = t.view(t.size(0), *dims)return t
- 系数与导数:
alpha_t = t(乘在数据端x1上),sigma_t = 1 - t(乘在噪声端x0上)d_alpha_t = 1,d_sigma_t = -1
def compute_alpha_t(self, t): return t, 1
def compute_sigma_t(self, t): return 1 - t, -1
- 路径上的点
x_t与目标速度/向量场u_t:x_t = alpha_t * x1 + sigma_t * x0 = t * x1 + (1 - t) * x0u_t = d_alpha_t * x1 + d_sigma_t * x0 = x1 - x0(线性情形下与 t 无关)
def compute_mu_t(self, t, x0, x1):t = expand_t_like_x(t, x1)alpha_t, _ = self.compute_alpha_t(t)sigma_t, _ = self.compute_sigma_t(t)return alpha_t * x1 + sigma_t * x0def compute_xt(self, t, x0, x1):xt = self.compute_mu_t(t, x0, x1); return xtdef compute_ut(self, t, x0, x1, xt):t = expand_t_like_x(t, x1)_, d_alpha_t = self.compute_alpha_t(t)_, d_sigma_t = self.compute_sigma_t(t)return d_alpha_t * x1 + d_sigma_t * x0def plan(self, t, x0, x1):xt = self.compute_xt(t, x0, x1)ut = self.compute_ut(t, x0, x1, xt)return t, xt, ut
- 在训练里如何用:
- 用
plan得到(t, x_t, u_t),把x_t, t喂给模型,预测model_output,用 MSE 对齐目标u_t:
- 用
t, x0, x1 = self.sample(x1)
t, xt, ut = self.path_sampler.plan(t, x0, x1)
model_output = model(xt, t, **model_kwargs)
terms['loss'] = mean_flat(((model_output - ut) ** 2))
为什么用 ut 作为 GT
- Flow Matching 的目标是学习“把噪声分布运输到数据分布”的向量场。
- 给定一条显式的连接路径(由 path_sampler 决定),其在时刻 t 的“真速度”就是 ut(本质是 dxt/dtdx_t/dtdxt/dt 的解析形式)。
- 训练时让模型输出去拟合 ut(用 MSE),等价于学会这条最优运输向量场。
- 推理时从噪声出发,沿学到的向量场(数值积分)就能走到数据分布,生成新的样本。