AutoTrack-IR-DR200底盘仿真详解:为教育领域打造的高效机器人学习实验平台
在现代机器人技术教育中,仿真实验扮演着至关重要的角色。AutoTrack-IR-DR200平台提供的DR200底盘仿真环境,为高校本科生提供了一个安全、经济且功能完备的学习平台。通过Gazebo仿真环境,学生可以在不接触实际硬件的情况下,深入理解机器人运动控制、传感器数据处理和导航算法的实现原理。这种"虚拟先行"的学习方式不仅降低了教学成本,更重要的是为学生提供了一个可以大胆尝试、反复调试的理想实验环境。
一、启动 Gazebo 仿真环境:搭建你的 “虚拟机器人实验室”
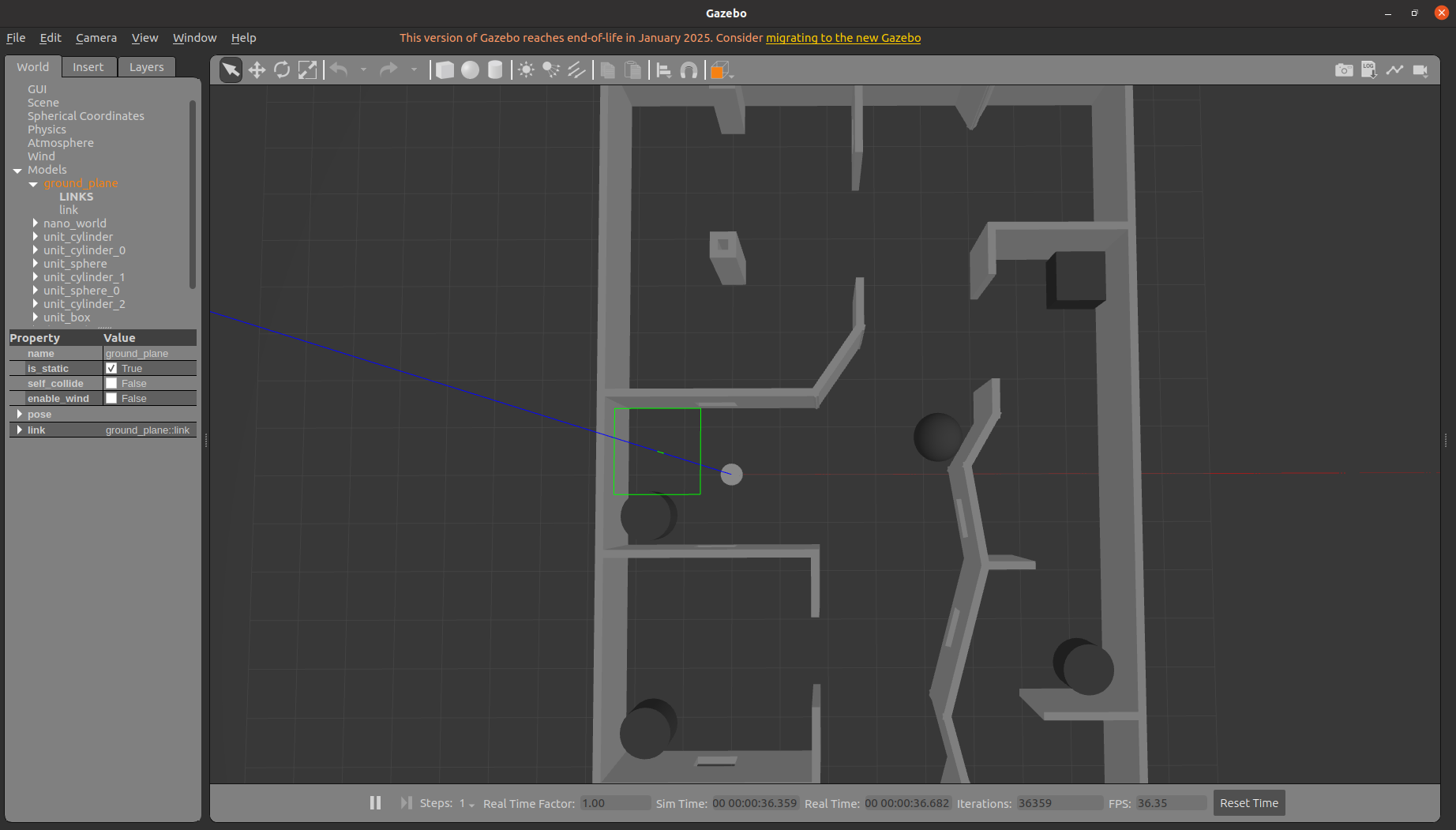
要操控虚拟 DR200 底盘,首先得启动 Gazebo 仿真环境 —— 它相当于 “虚拟实验室”,能模拟真实的室内场景(比如实验室的桌子、椅子),还能加载 DR200 底盘的 3D 模型,让你直观看到底盘的运动状态。下面我们一步步拆解启动步骤,每个命令都附带 “关键词解析” 和 “操作细节”:
1、第一步:先懂核心关键词 ——Gazebo 是什么?
Gazebo:是 ROS 生态中最常用的 “机器人仿真软件”,就像 “机器人版的模拟经营游戏”—— 你可以在里面搭建任意场景(实验室、教室、仓库),添加虚拟机器人(比如 DR200 底盘),还能模拟传感器数据(比如激光雷达、IMU 的虚拟数据)。对学习者来说,它的核心价值是 “安全、低成本”:就算让虚拟底盘撞墙,也不会有任何硬件损坏,还能反复调试参数。
2、第二步:启动前的 “环境准备”—— 加载工作空间
在启动 Gazebo 前,必须先 “告诉电脑仿真程序在哪里”—— 这就像你玩游戏前要先加载游戏安装目录,否则电脑找不到游戏文件。操作命令如下:
# 确保工作空间环境已加载
source ~/catkin_ws/devel/setup.bash
3、第三步:启动 Gazebo 仿真环境 —— 加载虚拟 DR200 底盘
执行完环境加载命令后,输入以下命令启动 Gazebo 并加载 DR200 底盘模型:
roslaunch dr200_description gazebo.launch publish_odom_tf:=true
二、控制机器人运动:两种方式玩转虚拟底盘
启动 Gazebo 后,虚拟 DR200 底盘还不会动 —— 需要通过 “控制命令” 让它前进、转弯。下面介绍两种最适合本科生的控制方式:“键盘控制”(精确灵活)和 “图形控制”(直观易懂),你可以根据实验需求选择。
方法 1:使用键盘控制 —— 像玩游戏一样操控底盘
键盘控制是 ROS 中最经典的运动控制方式,就像用键盘玩 “贪吃蛇” 一样,通过特定按键控制底盘的运动方向和速度,适合需要 “精确控制” 的实验(比如让底盘沿直线走 1 米、原地转 90 度)。
# 安装键盘控制包(如果未安装)
sudo apt-get install ros-melodic-teleop-twist-keyboard
# 启动键盘控制
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
# 按照提示使用以下按键控制:
# u i o
# j k l
# m , .
# q/z : 增加/减少最大速度
# w/x : 增加/减少线速度
# e/c : 增加/减少角速度
方法 2:使用 rqt_robot_steering 图形控制 —— 用滑块直观调速度
如果觉得记键盘按键麻烦,或者需要 “可视化调节速度”(比如精确设置线速度 0.15m/s、角速度 0.8rad/s),可以用rqt_robot_steering图形控制工具 —— 它就像 “机器人的控制面板”,用滑块和输入框就能控制运动,特别适合新手和需要 “精确参数设置” 的实验。
# 启动图形控制界面
rosrun rqt_robot_steering rqt_robot_steering
# 在界面中使用滑块或输入框控制线速度和角速度
AutoTrack-IR-DR200的DR200底盘仿真环境为高校机器人教育提供了一个完整、先进且易于使用的学习平台。通过Gazebo仿真环境,学生可以在安全的虚拟空间中探索机器人技术的各个方面,从基础的运动控制到复杂的自主导航算法。
仿真平台不仅提供了技术学习的工具,更重要的是培养了一种系统化的工程思维方式。学生通过实际操作,学习如何分析问题、设计解决方案、实现系统集成和进行性能优化。这种"做中学"的教育模式,极大地提高了学习效果和创新能力。
随着仿真技术的不断发展,这个平台将继续完善和增强,加入更多先进的功能和算法,为高校机器人教育提供更加强大的支持。我们相信,通过这样的仿真学习环境,能够培养出更多具有创新精神和实践能力的机器人技术人才。