Nature子刊-香港大学研发新型陡峭山坡巡检无人机,破解密林细小障碍物规避难题
前言
在无人机技术蓬勃发展的当下,复杂环境飞行与避障仍是棘手难题,特别是在山多林密的环境中,对陡峭山坡进行定期安全巡检是一项至关重要但又充满挑战与危险的任务。传统的人工巡检不仅成本高、效率低,作业人员还需面对恶劣的自然环境;而现有的商用无人机在植被茂密的复杂场景中,往往因视觉感知系统的局限性,难以识别并规避细小的树枝、藤蔓或金属网,极易发生碰撞事故。
针对这一行业痛点,香港大学的研究团队研发了一套全新的无人机巡检系统。该系统以高精度激光雷达(LiDAR)为核心传感器,通过创新的建图、规划与控制算法,赋予了无人机在GPS信号缺失的密林中精准定位、并实时规避动态及细小障碍物的卓越能力,成功破解了长期困扰无人机在复杂环境下应用的难题,为边坡安全管理乃至更广泛的无人机行业应用带来了革命性的解决方案。
论文题目:Slope inspection under dense vegetation using LiDAR-based quadrotors
论文作者:Wenyi Liu, Yunfan Ren, Rui Guo, Vickie W. W. Kong, Anthony S. P. Hung, Fangcheng Zhu, Yixi Cai, Huajie Wu, Yuying Zou, Fu Zhang
论文地址:Slope inspection under dense vegetation using LiDAR-based quadrotors | Nature Communications

为解决在植被茂密、GPS信号缺失环境下无人机巡检的难题,研究团队设计了一套以激光雷达(LiDAR)为核心的综合软硬件系统。该系统的核心在于“人机协同”的辅助避障飞行模式:飞行员通过遥控器下达高级指令,而无人机则自主地进行实时环境感知、路径规划和障碍物规避,具体框架如下图所示。其实现主要依赖于以下四大模块的紧密协作:
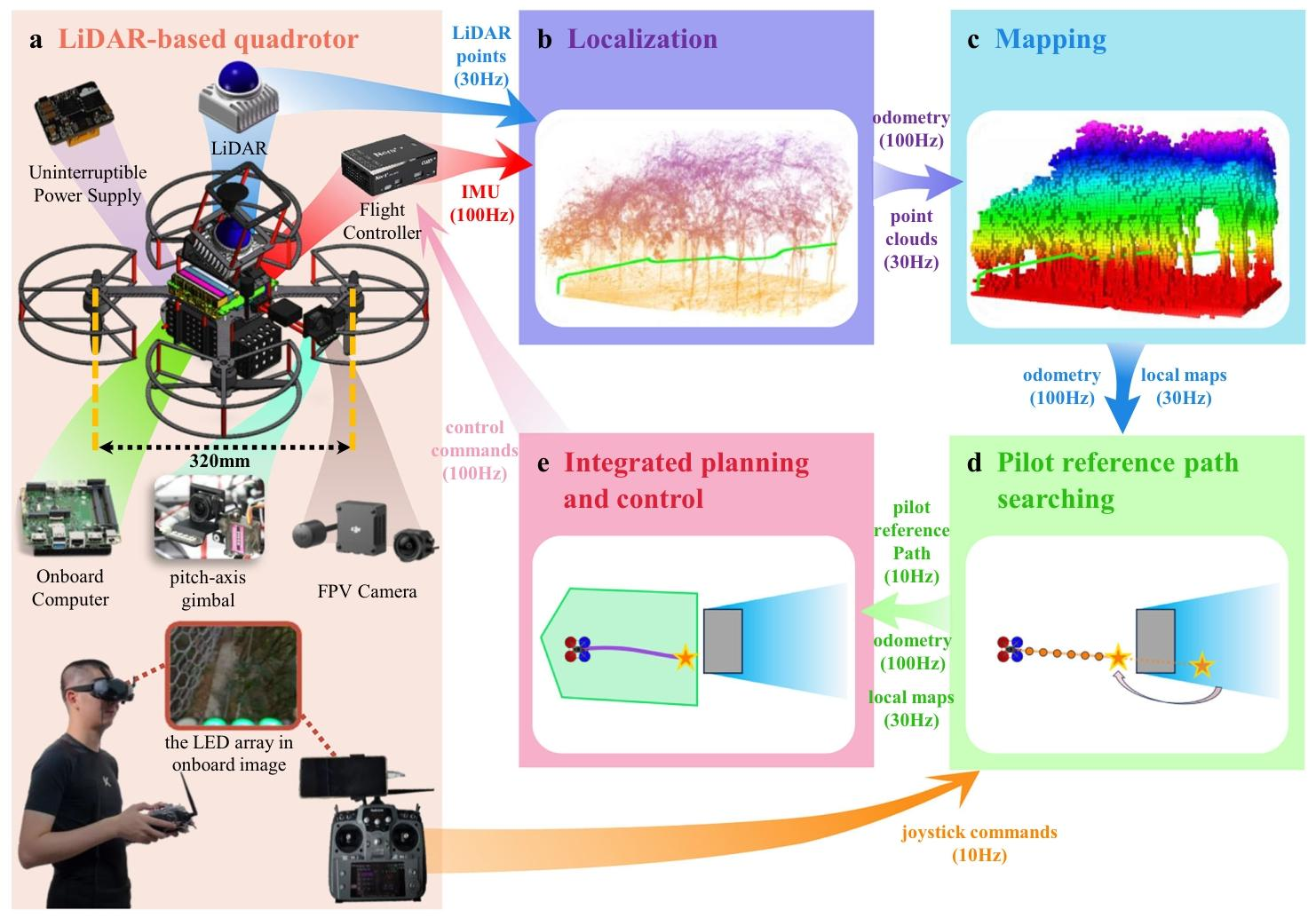
图1|陡峭山坡巡检无人机系统框架
1. 硬件平台与三维感知
无人机平台的设计综合考虑了在狭窄空间中的机动性、传感器需求和飞行续航,其硬件配置旨在实现高精度的环境感知和稳健的实时运算能力。在核心感知单元部分使用了 Livox Mid-360 激光雷达,通过非重复扫描模式精确捕捉环境细节。它提供360°水平视场和59°垂直视场,保证了宽广的场景感知范围,为后续的定位和建图算法提供了丰富的输入,且其性能不受环境光照变化的影响。所有复杂的感知与控制算法都在机载的高性能Intel NUC迷你计算机上实时运行,该计算机搭载了i7-1260P CPU,运算频率高达4.7 GHz,为系统提供了强大的算力支持。
为了让飞行员能实时观察并进行有效的人机交互,无人机配备了大疆O3 Air Unit高清数字图传系统和配套的DJI Goggles 2。该系统图传延迟低至40毫秒,能录制120Hz高帧率的4K视频,为飞行员提供了及时、清晰的外部环境反馈。为了扩大观察视野,相机被安装在一个俯仰轴云台上,飞行员可实时遥控云台角度,以便于观察边坡上障碍物的顶部和底部 。
2. 定位与环境建图
在GPS失效的密林中,系统采用FAST-LIO2激光雷达惯性里程计算法,以100Hz的频率实时、精准地估算无人机状态(位置、姿态、速度)。同时,一个经过改进的ROG-Map建图模块会利用定位结果和点云数据,实时构建一个以无人机为中心的高分辨率三维栅格地图,示意图如下。
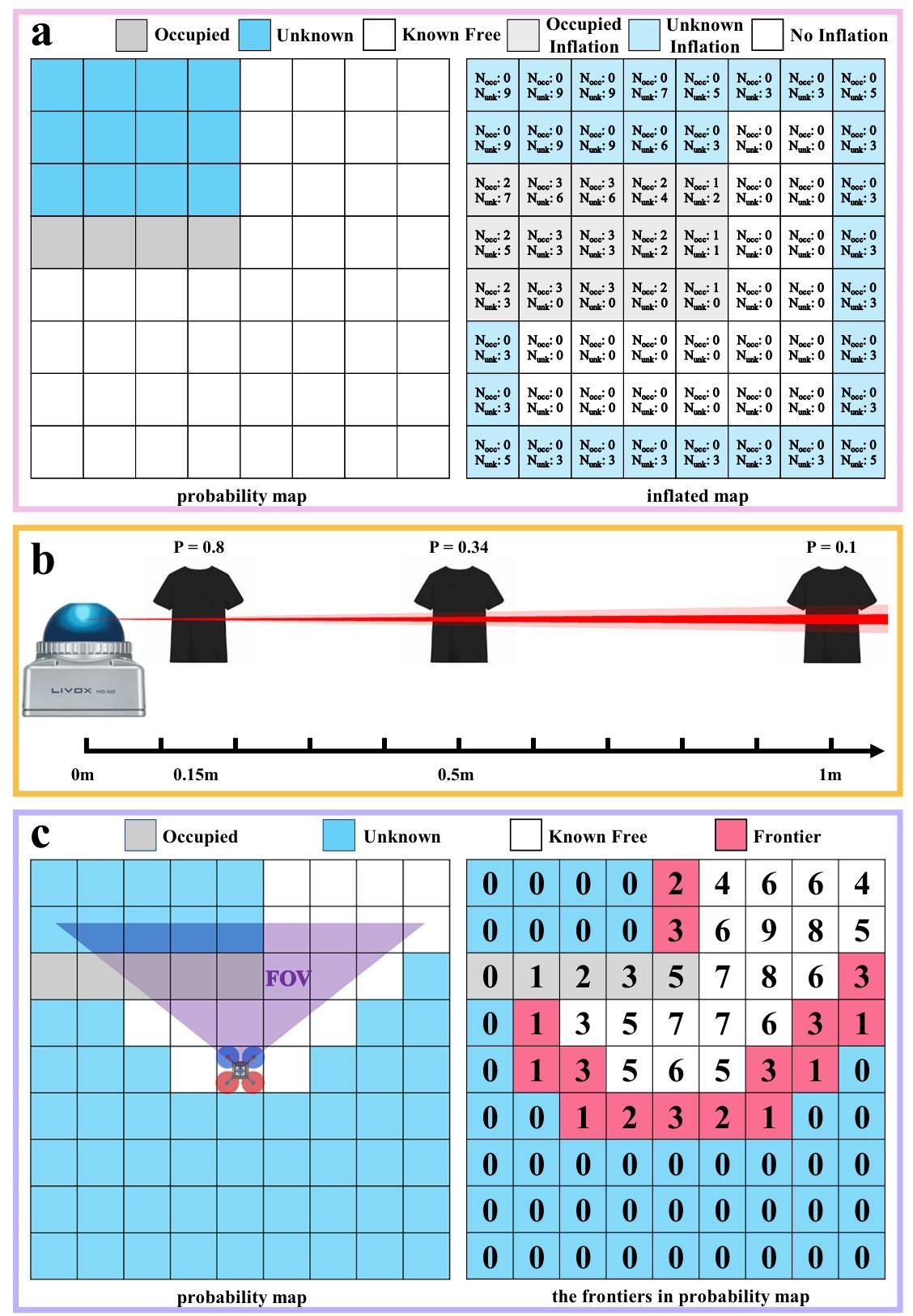
图2|建图模块工作示意图
该地图通过维护每个栅格单元的占用状态来实现安全导航,其核心机制包括:
栅格状态分类:地图中的每个栅格单元被分为占用 (Occupied)、空闲 (Known Free) 或未知 (Unknown) 。
安全膨胀机制:为了给无人机留出足够的安全距离,系统会对占用和未知的栅格进行膨胀处理。通过维护两个计数器和
,膨胀地图中的栅格状态被定义为:
3. 飞行员意图引导的路径搜索
该模块负责将飞行员的遥控器指令转化为一条安全、无碰撞的参考路径,示意图如下。
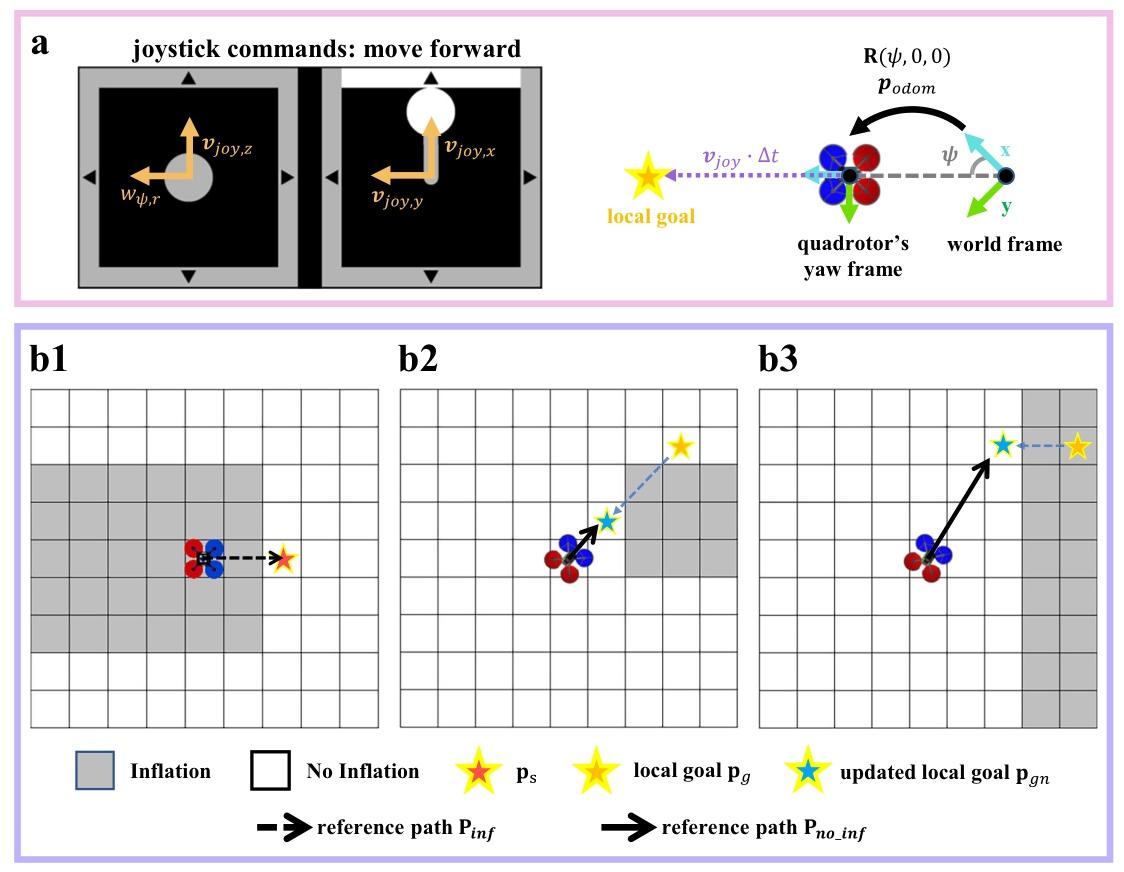
图3|用于辅助避障的飞行员参考路径搜索模块示意图
系统首先将飞行员的摇杆输入解析为无人机航向坐标系下的期望速度,并计算出一个临时的局部目标点
,具体形式为
其中,是无人机当前位置,
是偏航角,
是旋转矩阵,
是指令步长。
随后,算法会在膨胀地图上搜索一条分段式路径,第一段
负责引导无人机从当前可能处于的膨胀区域移动到安全的未膨胀区域;第二段
则引导无人机从安全区飞向最终调整后的局部目标点。
4. 一体化规划与控制
为确保无人机能敏捷、平稳地执行飞行,采用模型预测控制(MPC)算法的一体化规划与控制框架被提出,它将规划与控制统一为一个优化问题,以100Hz的频率直接生成最优的控制指令(油门和角速度)。该优化问题的目标是在满足动力学和安全约束的前提下,最小化一个代价函数:
该优化过程受到系统动力学约束,状态约束
, 输入约束
。其中,
是无人机在未来时间步
的状态 (位置、速度等),
是控制输入,
是参考路径上的对应状态点。
是调节跟踪精度和控制平滑度的权重矩阵。
为避免发生碰撞,保证安全,无人机的位置 必须始终位于提前生成的安全飞行走廊
内,该走廊被构建为凸多面体,以确保绝对无碰撞,如下图所示。这种一体化设计使得无人机响应极快,能灵活规避动态障碍物并有效抵抗阵风的干扰。
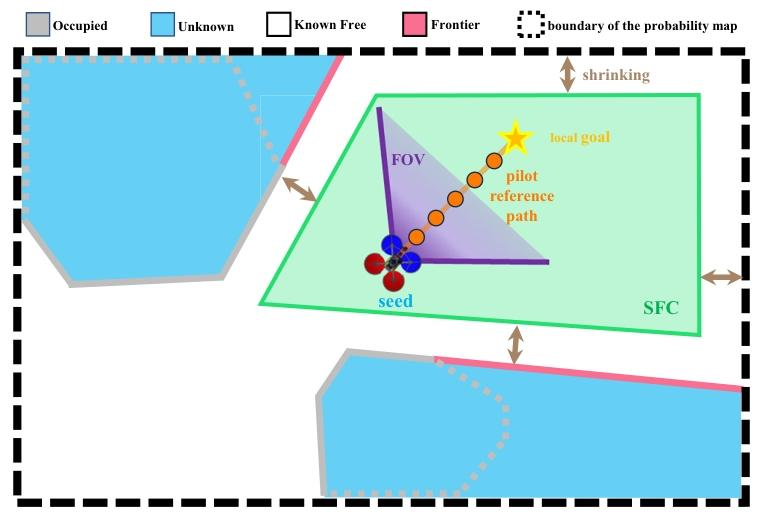
图4|未知环境下安全飞行走廊生成示意图

为了全面验证陡峭山坡巡检无人机系统的性能和实用性,研究团队进行了一系列从受控环境到真实野外场景的严格实验,并与顶级商用无人机进行了对比。实验结果充分证明了该系统在复杂环境下卓越的障碍物规避能力。
1.室内避障功能测试
在投入真实场景前,研究团队首先在非作业场景下对无人机的辅助障碍物规避进行了测试,测试结果如下图所示。在狭窄环境测试中,研究团队搭建了一个布满细网和薄杆的狭窄空间,无人机在飞行员的指令下成功完成了长达99米的飞行轨迹,并且始终与最近的障碍物保持着大于自身尺寸的安全距离,从未发生碰撞 。这验证了系统对细小物体的高精度建图和路径规划能力。
在动态避障测试中,研究人员作为动态障碍物靠近无人机,尽管飞行员通过遥控器下达了前进的指令,但无人机自主识别了动态障碍,并主动向后飞行以规避人员,确保了安全 。这证明了系统具备极低的延迟和快速响应能力,足以应对动态环境。
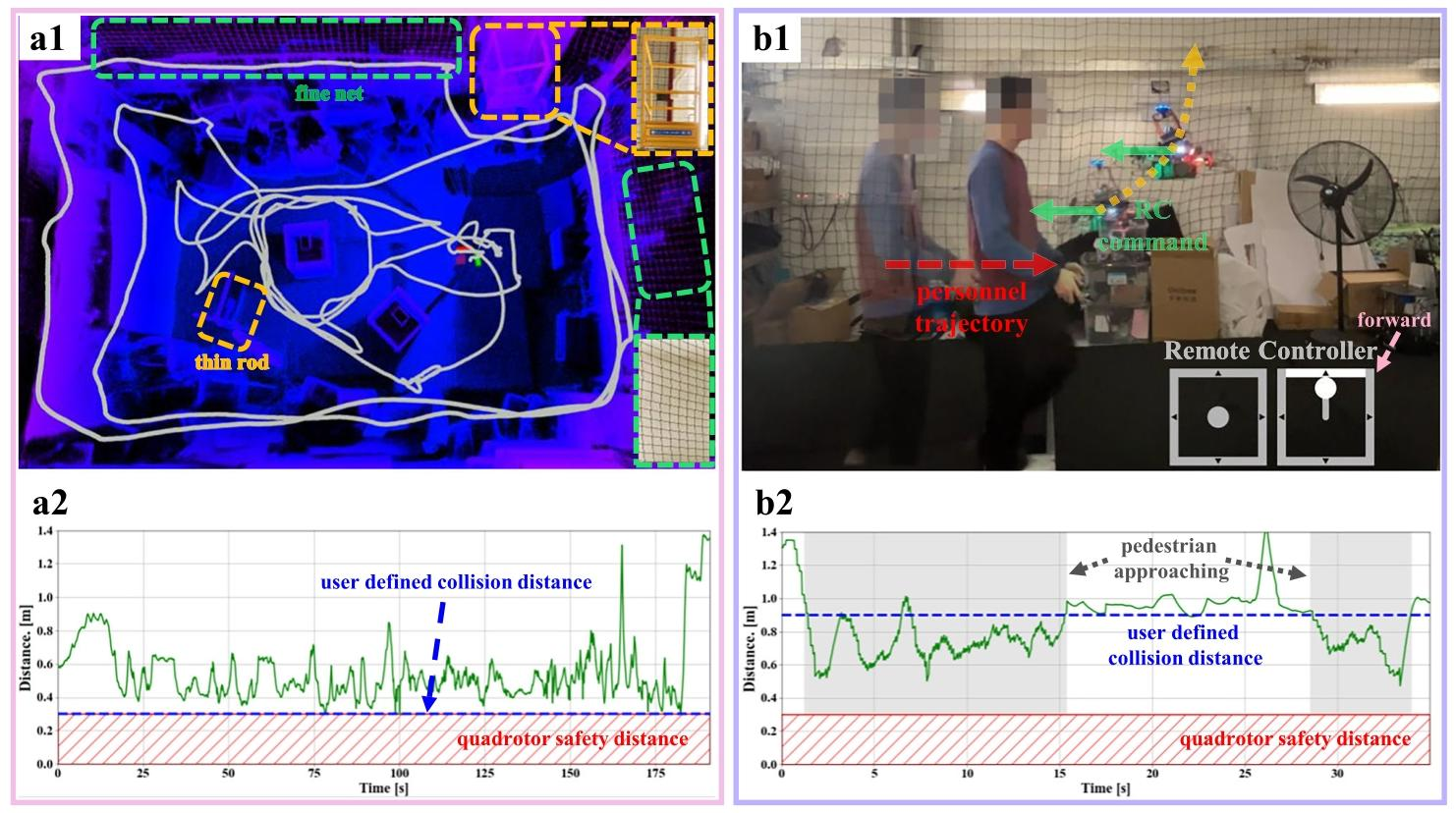
图5|室内避障功能测试示意图
2.室外山坡巡检实验
为检验系统在室外的实际性能,研究团队在香港六个真实的复杂山坡进行了部署。这些地点包括五处植被极其茂密的陡坡和一个近期发生过山体滑坡的灾害点。
如下表所示,在所有六次室外实验中,无人机均成功完成了对柔性防护网、山体落石的近距离视觉检查任务。这些地点环境复杂,其中五处是植被覆盖茂密的陡坡,另一处是因暴雨引发山体滑坡的地点。在所有六次实地实验中,无人机均成功完成了指定的近距离视觉检查任务,包括检查柔性防护网和滑坡造成的石块。无人机在飞行中展示了在复杂环境中的导航能力,能够机动地穿过茂密的树冠,避开空中悬垂的藤蔓,并安全通过狭窄的树枝缝隙。在实验过程中,即使存在平均风速为 4.17 m/s 的自然风干扰,无人机也能够有效抑制扰动,维持稳定的飞行表现。与此同时,机载系统在飞行中实时生成了高精度的三维点云地图,为后续的工程分析和区域数字化存档提供了有价值的数据。这些野外实验的执行情况可通过图6中的现场照片进行观察 。而每一次飞行的详细数据,包括飞行轨迹、实时构建的点云地图和检查照片,均记录在图7中。
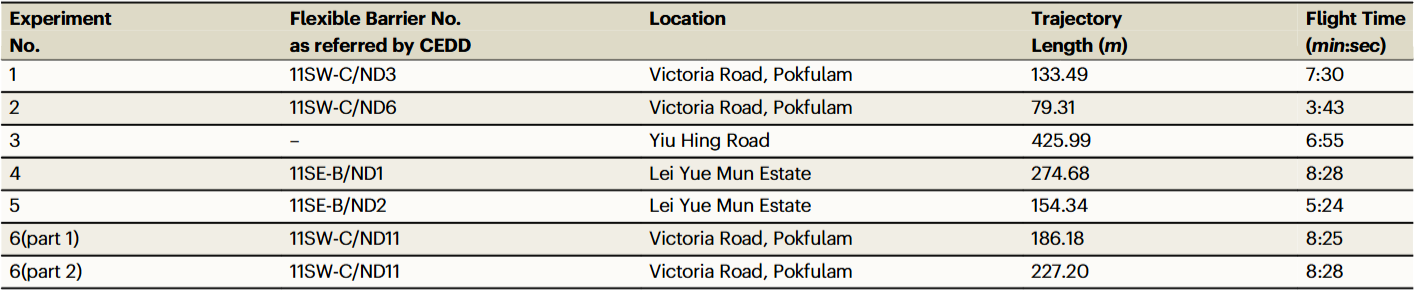
表1|六次室外实验的飞行数据
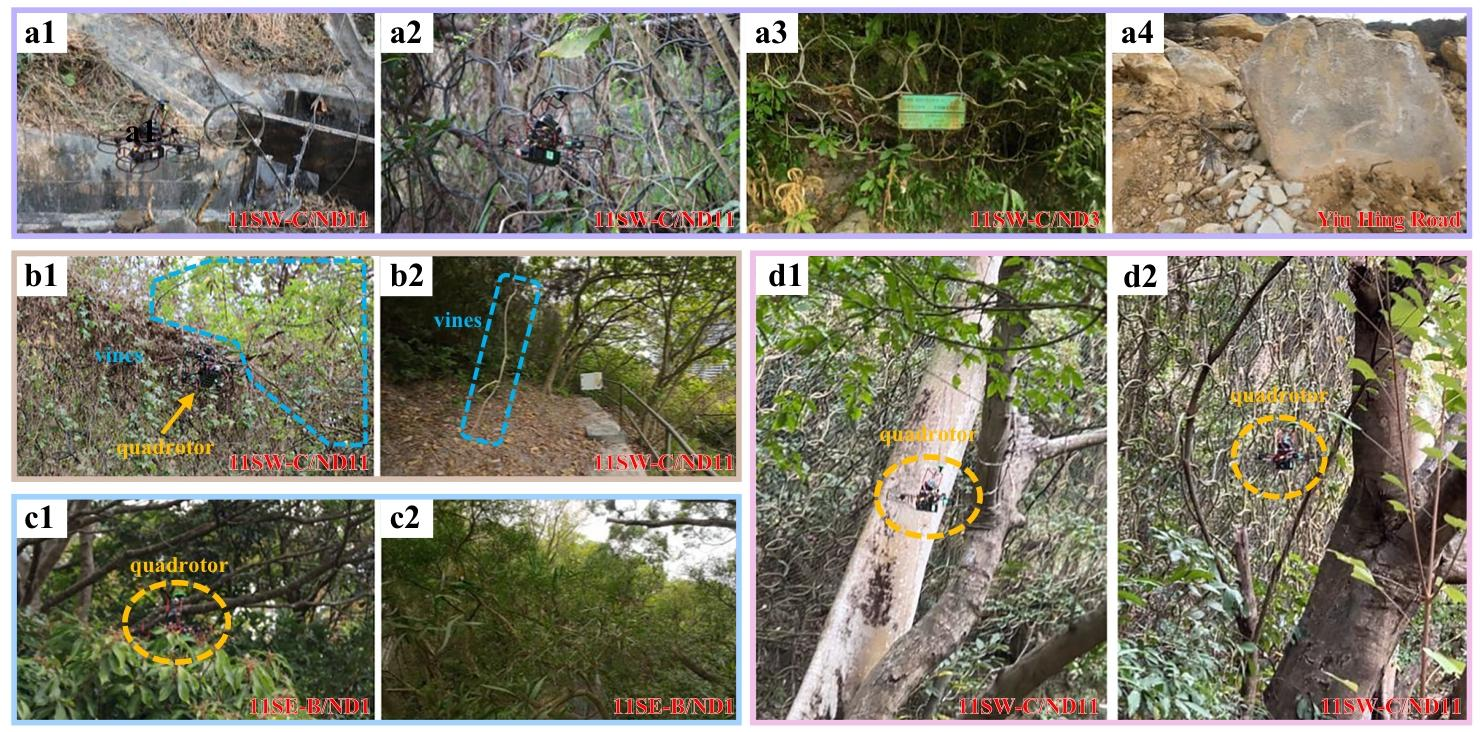
图6|无人机在室外山坡巡检示意图
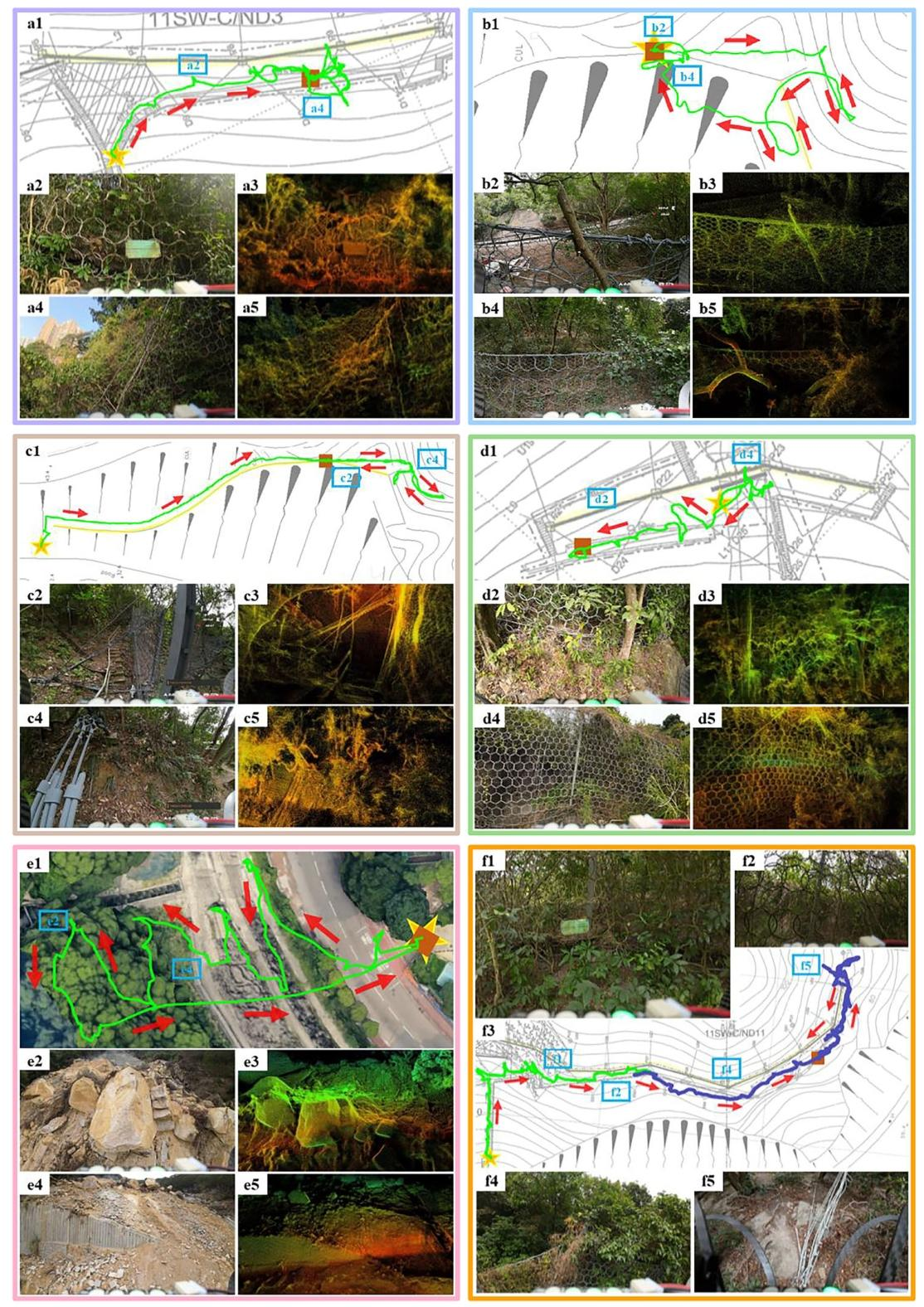
图7|山坡巡检无人机在室外巡检期间的飞行数据
3.商用无人机对比实验
为了进一步验证系统的性能优势,研究团队在真实的密林山坡环境中,将其研发的无人机与大疆Mavic 3无人机进行了直接的对比实验。在测试中,大疆Mavic 3的普通绕行和刹车模式表现出高度保守的行为,即便前方存在明显的可通行路径,它也会频繁地原地悬停,无法在植被密集的区域有效前进。一个关键的感知局限是,即使在最保守的刹车模式下,Mavic 3也未能识别出前方的细网,并直接与之发生碰撞。在其最激进的灵巧绕行模式下,虽然通过性有所提高,但飞行安全性随之降低,机身桨叶容易与树叶和细枝发生碰撞。在该模式下,Mavic 3还因未能探测并避开一条钢丝绳而发生碰撞并坠毁。相比之下,本文提出的激光雷达无人机在相同的测试场景下,能够机动地穿过狭窄区域,同时大致遵循飞行员的指令。它成功地感知到了细网并执行了悬停避让,避免了碰撞。该系统能够可靠运行,得益于激光雷达的高精度测量能力和高分辨率的建图模块,使其能够有效感知并规划路径以规避细小的树枝和网丝等障碍物。这些对比实验的结果如图8所示,其中展示了Mavic 3的一系列避障失效情况,包括其保守的悬停行为、未能识别细网导致的碰撞、以及撞上钢丝绳的画面。图8中也展示了本文提出的无人机在相同环境下的稳定飞行,并成功识别了Mavic 3未能避开的细网。
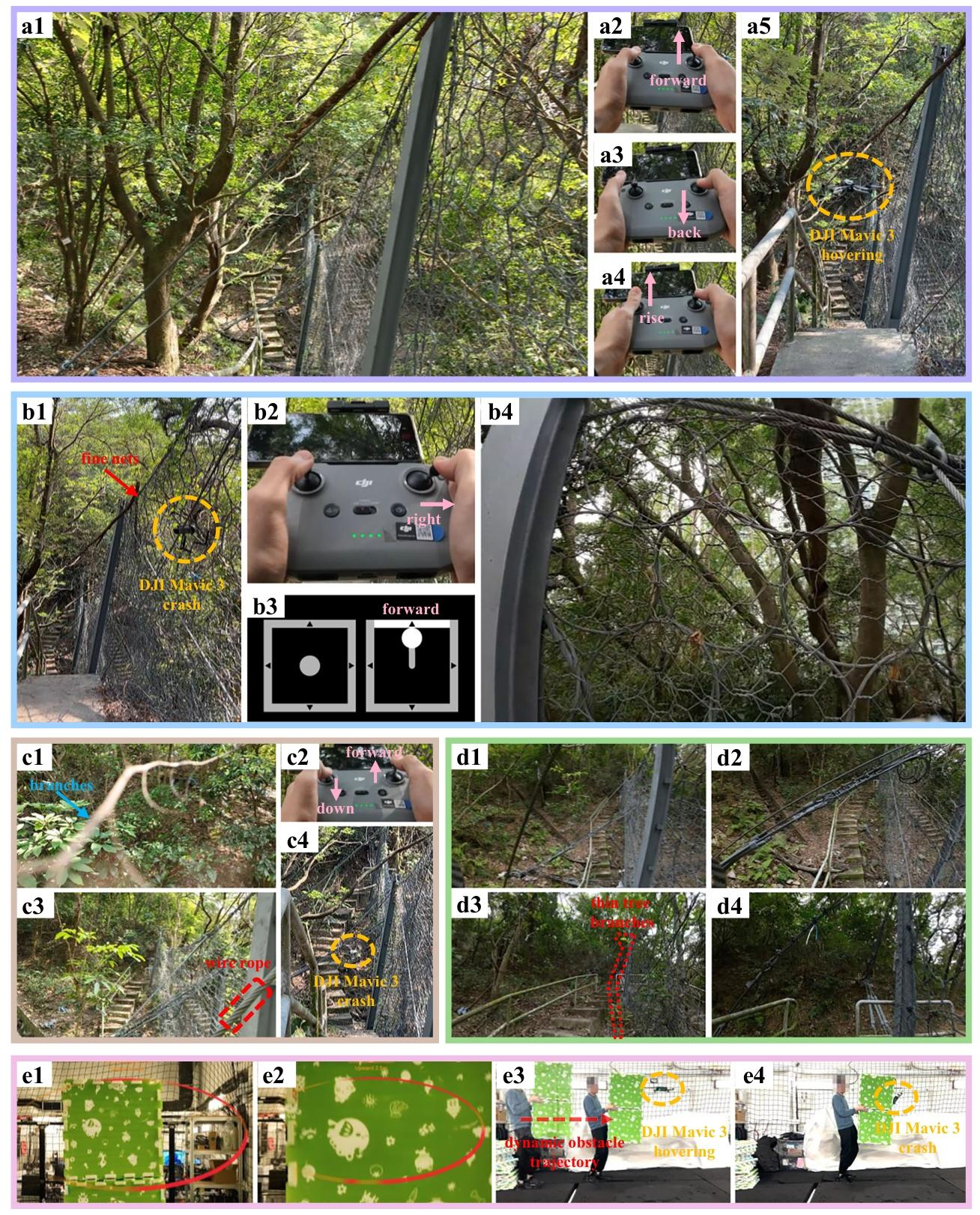
图8|山地巡检无人机与DJI Mavic 3进行基准测试

为解决在常见的茂密植被下进行山坡巡检的难题,香港大学研发了一套以激光雷达为核心传感器的无人机综合解决方案。该系统通过人机协同的辅助避障模式,允许飞行员专注于下达高级飞行指令,而无人机则利用高精度的实时建图与一体化规划控制框架,自主规避飞行路径上的细小及动态障碍物。在对六处真实复杂边坡进行的野外实验中,该无人机成功完成了所有近距离检查任务,并在与顶级商用无人机DJI Mavic 3的对比测试中,展现了其在感知和规避细网、藤蔓等微小物体方面的显著优势。此项研究不仅为边坡安全巡检提供了一种高效、可靠的新方法,也代表了自主无人机技术从实验室走向复杂现实环境应用的重要一步 。