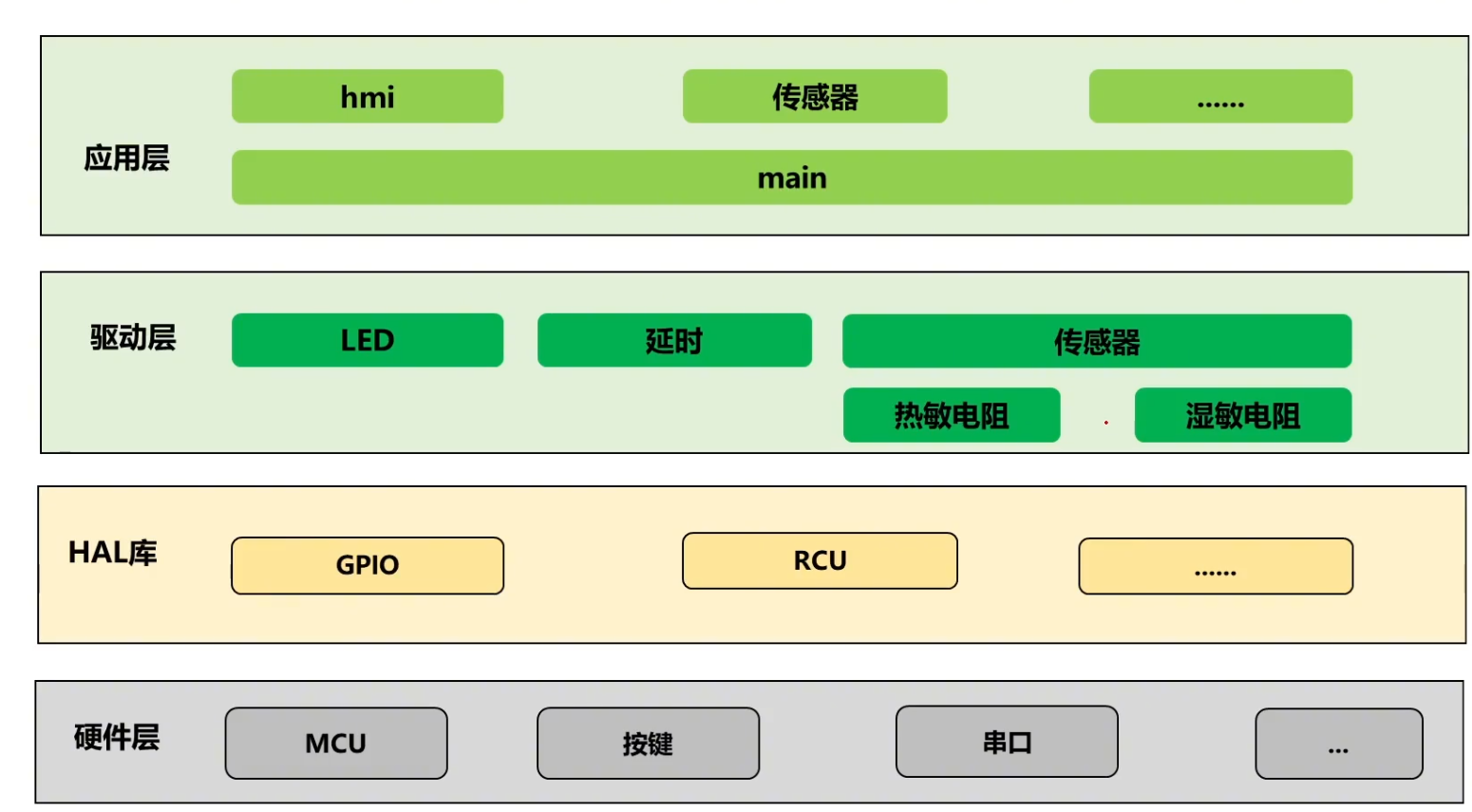
GD32入门到实战27--传感器任务框架搭建
我们编写sensor_drv.c
#include <stdint.h>
#include "gd32f30x.h"
#include "sensor_drv.h"
#include "ntc_drv.h"/**
***********************************************************
* @brief 传感器驱动初始化
* @param
* @return
***********************************************************
*/
void SensorDrvInit(void)
{TempDrvInit();
}/**
***********************************************************
* @brief 触发驱动转换传感器数据
* @param
* @return
***********************************************************
*/
void SensorDrvProc(void)
{TempSensorProc();
}/**
***********************************************************
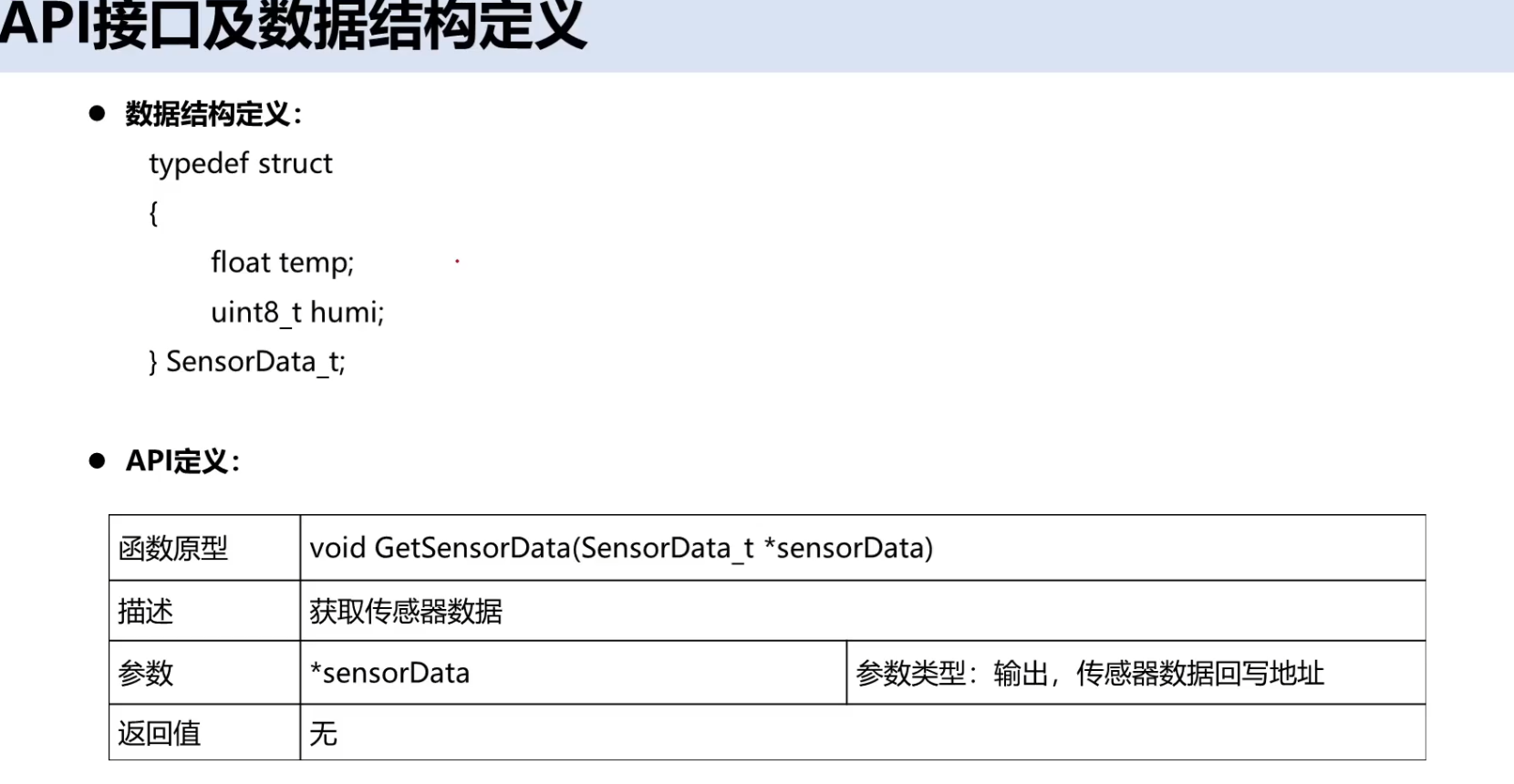
* @brief 获取传感器数据
* @param sensorData,输出,传感器数据回写地址
* @return
***********************************************************
*/
void GetSensorData(SensorData_t *sensorData)
{sensorData->temp = GetTempData();
}
热敏电阻驱动实现ntr.c
#include <stdint.h>
#include <string.h>
#include <stdio.h>
#include <stdlib.h>
#include <stdbool.h>
#include "gd32f30x.h"
#include "delay.h"static float g_tempData;
#define MAX_BUF_SIZE 10
static uint16_t g_temp10MplBuf[MAX_BUF_SIZE];static const uint16_t g_ntcAdcTable[] = {3123, 3089, 3051, 3013, 2973, 2933, 2893, 2852, 2810, 2767, //0 ~ 9℃2720, 2681, 2637, 2593, 2548, 2503, 2458, 2412, 2367, 2321, //10 ~ 19℃2275, 2230, 2184, 2138, 2093, 2048, 2002, 1958, 1913, 1869, //20 ~ 29℃1825, 1782, 1739, 1697, 1655, 1614, 1573, 1533, 1494, 1455, //30 ~ 39℃1417, 1380, 1343, 1307, 1272, 1237, 1203, 1170, 1138, 1106, //40 ~ 49℃1081, 1045, 1016, 987, 959, 932, 905, 879, 854, 829, //50 ~ 59℃806, 782, 760, 738, 716, 696, 675, 656, 637, 618, //60 ~ 69℃600, 583, 566, 550, 534, 518, 503, 489, 475, 461, //70 ~ 79℃448, 435, 422, 410, 398, 387, 376, 365, 355, 345, //80 ~ 89℃335, 326, 316, 308, 299, 290, 283, 274, 267, 259, //90 ~ 99℃
};
#define NTC_TABLE_SIZE (sizeof(g_ntcAdcTable) / sizeof(g_ntcAdcTable[0]))
#define INDEX_TO_TEMP(index) ((int32_t)index)static void GpioInit(void)
{rcu_periph_clock_enable(RCU_GPIOC);gpio_init(GPIOC, GPIO_MODE_AIN, GPIO_OSPEED_10MHZ, GPIO_PIN_3);
}
static void AdcInit(void)
{/* 使能时钟;*/rcu_periph_clock_enable(RCU_ADC0);/* 设置分频系数;*/rcu_adc_clock_config(RCU_CKADC_CKAPB2_DIV6); // 6分频,120MHz / 6 = 20MHz/* 设置独立模式;*/adc_mode_config(ADC_MODE_FREE);/* 设置连续模式;*/ adc_special_function_config(ADC0, ADC_CONTINUOUS_MODE, ENABLE);/* 设置数据对齐;*/adc_data_alignment_config(ADC0, ADC_DATAALIGN_RIGHT);/* 设置转换通道个数;*/ adc_channel_length_config(ADC0, ADC_REGULAR_CHANNEL, 1);/* 设置转换哪一个通道以及所处序列位置;*/ adc_regular_channel_config(ADC0, 0, ADC_CHANNEL_13, ADC_SAMPLETIME_239POINT5); // PC3对应通道13,放在序列寄存器的0序列中,239.5个周期/* 设置选择哪一个外部触发源;*/ adc_external_trigger_source_config(ADC0, ADC_REGULAR_CHANNEL, ADC0_1_2_EXTTRIG_REGULAR_NONE);/* 使能外部触发;*/ adc_external_trigger_config(ADC0, ADC_REGULAR_CHANNEL, ENABLE);/* 使能硬件滤波;*/ adc_oversample_mode_config(ADC0, ADC_OVERSAMPLING_ALL_CONVERT, ADC_OVERSAMPLING_SHIFT_4B, ADC_OVERSAMPLING_RATIO_MUL16);adc_oversample_mode_enable(ADC0);/* 使能ADC;*/ adc_enable(ADC0);/* 内部校准;*/ DelayNus(50);adc_calibration_enable(ADC0);adc_software_trigger_enable(ADC0, ADC_REGULAR_CHANNEL);
}static uint16_t GetAdcVal(void)
{/* 等待转换完成标志 */while(!adc_flag_get(ADC0, ADC_FLAG_EOC));/* 读取数据寄存器 */return (adc_regular_data_read(ADC0));
}/**
***********************************************************
* @brief NTC驱动初始化
* @param
* @return
***********************************************************
*/
void TempDrvInit(void)
{GpioInit();AdcInit();
}static int32_t DescBinarySearch(const uint16_t *arr, int32_t size, uint16_t key)
{int32_t left = 0; int32_t right = size - 1; int32_t mid;int32_t index = size - 1;while (left <= right) {mid = left + (right - left) / 2; if (key >= arr[mid]){right = mid - 1;index = mid;}else{left = mid + 1; }}return index;
}static uint16_t AdcToTemp10Mpl(uint16_t adcVal)
{int32_t index = DescBinarySearch(g_ntcAdcTable, NTC_TABLE_SIZE, adcVal);if (index == 0){return 0;}uint16_t temp10Mpl = INDEX_TO_TEMP(index - 1) * 10 + (g_ntcAdcTable[index - 1] - adcVal) * 10 / (g_ntcAdcTable[index - 1] - g_ntcAdcTable[index]);return temp10Mpl;
}/**
***********************************************************
* @brief 算术平均滤波
* @param arr,数组首地址
* @param len,元素个数
* @return 平均运算结果
***********************************************************
*/
static uint16_t ArithAvgFltr(uint16_t *arr, uint32_t len)
{uint32_t sum = 0;for (uint32_t i = 0; i < len; i++){sum += arr[i];}return (uint16_t)(sum / len);
}/**
***********************************************************
* @brief qsort函数调用的回调函数,比较规则,降序排列
* @param *_a,对应数组元素
* @param *_b,对应数组元素
* @return 比较结果
***********************************************************
*/
static int32_t CmpCb(const void *_a, const void *_b)
{uint16_t *a = (uint16_t *)_a;uint16_t *b = (uint16_t *)_b;int32_t val = 0;if (*a > *b){val = -1;}else if (*a < *b){val = 1;}else{val = 0;}return val;
}/**
***********************************************************
* @brief 中位值平均滤波
* @param arr,数组首地址
* @param len,元素个数,需要大于等于3个
* @return 平均运算结果
***********************************************************
*/
static uint16_t MedianAvgFltr(uint16_t *arr, uint32_t len)
{// 使用qsort函数对数组进行降序排序,CmpCb是排序的回调函数qsort(arr, len, sizeof(uint16_t), CmpCb);// 调用ArithAvgFltr函数计算去掉最大和最小值后的平均值return ArithAvgFltr(&arr[1], len - 2);
}
/**
***********************************************************
* @brief 将新的温度数据推入缓冲区
* @param temp10Mpl:新的温度数据(单位:0.1℃)
* @return 无
***********************************************************
*/
void PushDataToBuf(uint16_t temp10Mpl)
{// 静态变量,用于记录当前缓冲区的索引位置static uint16_t s_index = 0; // 将新的温度数据存入缓冲区的当前索引位置g_temp10MplBuf[s_index] = temp10Mpl; // 索引加1,准备存储下一个数据s_index++;// 当索引达到缓冲区最大大小时,循环回到缓冲区的起始位置s_index %= MAX_BUF_SIZE;
}/**
***********************************************************
* @brief 触发驱动转换温度传感器数据
* @param
* @return
***********************************************************
*/
void TempSensorProc(void)
{// 静态变量,用于记录已经转换的次数static uint16_t s_convertNum = 0;// 获取ADC值uint16_t adcVal = GetAdcVal();// 将ADC值转换为温度值(单位:0.1℃)uint16_t temp10Mpl = AdcToTemp10Mpl(adcVal);// 将新的温度值存入缓冲区PushDataToBuf(temp10Mpl);// 转换次数加1s_convertNum++;// 如果转换次数小于3次,直接取缓冲区的第一个值作为温度数据if (s_convertNum < 3){//(中位运算要减头尾)g_tempData = g_temp10MplBuf[0] / 10.0f;return;}// 如果转换次数超过缓冲区的最大大小,限制为最大大小if (s_convertNum > MAX_BUF_SIZE){s_convertNum = MAX_BUF_SIZE;}// 使用中位值平均滤波算法处理缓冲区中的数据,并更新全局温度数据g_tempData = MedianAvgFltr(g_temp10MplBuf, s_convertNum) / 10.0f;// 将温度值转换为浮点数(单位:℃)
}/**
***********************************************************
* @brief 获取温度传感器数据
* @param
* @return 温度数据,小数
***********************************************************
*/
float GetTempData(void)
{return g_tempData;
}
main
#include <stdint.h>
#include <stdio.h>
#include "led_drv.h"
#include "key_drv.h"
#include "systick.h"
#include "usb2com_drv.h"
#include "rtc_drv.h"
#include "delay.h"
#include "sensor_drv.h"
#include "usb2com_app.h"
#include "hmi_app.h"
#include "sensor_app.h"typedef struct
{uint8_t run; // 调度标志,1:调度,0:挂起uint16_t timCount; // 时间片计数值uint16_t timRload; // 时间片重载值void (*pTaskFuncCb)(void); // 函数指针变量,用来保存业务功能模块函数地址
} TaskComps_t;static TaskComps_t g_taskComps[] =
{{0, 500, 500, HmiTask},{0, 1000, 1000, SensorTask},/* 添加业务功能模块 */
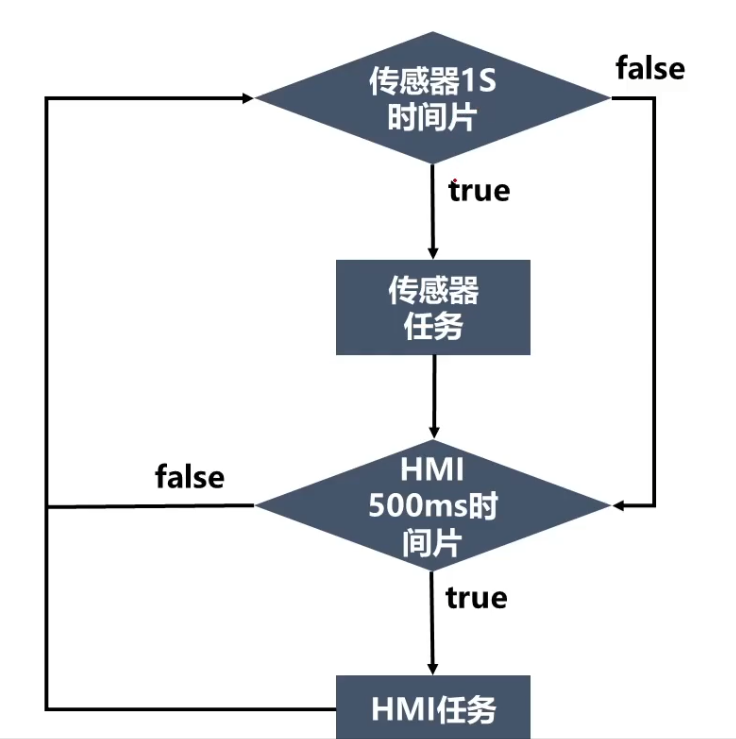
};#define TASK_NUM_MAX (sizeof(g_taskComps) / sizeof(g_taskComps[0]))static void TaskHandler(void)
{for (uint8_t i = 0; i < TASK_NUM_MAX; i++){if (g_taskComps[i].run) // 判断时间片标志{g_taskComps[i].run = 0; // 标志清零g_taskComps[i].pTaskFuncCb(); // 执行调度业务功能模块}}
}/**
***********************************************************
* @brief 在定时器中断服务函数中被间接调用,设置时间片标记,需要定时器1ms产生1次中断
* @param
* @return
***********************************************************
*/
static void TaskScheduleCb(void)
{for (uint8_t i = 0; i < TASK_NUM_MAX; i++){if (g_taskComps[i].timCount){g_taskComps[i].timCount--;if (g_taskComps[i].timCount == 0){g_taskComps[i].run = 1;g_taskComps[i].timCount = g_taskComps[i].timRload;}}}
}static void DrvInit(void)
{DelayInit();LedDrvInit();KeyDrvInit();Usb2ComDrvInit();RtcDrvInit();SensorDrvInit();SystickInit();
}
static void AppInit(void)
{TaskScheduleCbReg(TaskScheduleCb);
}int main(void)
{ DrvInit();AppInit();while (1){TaskHandler();}
}
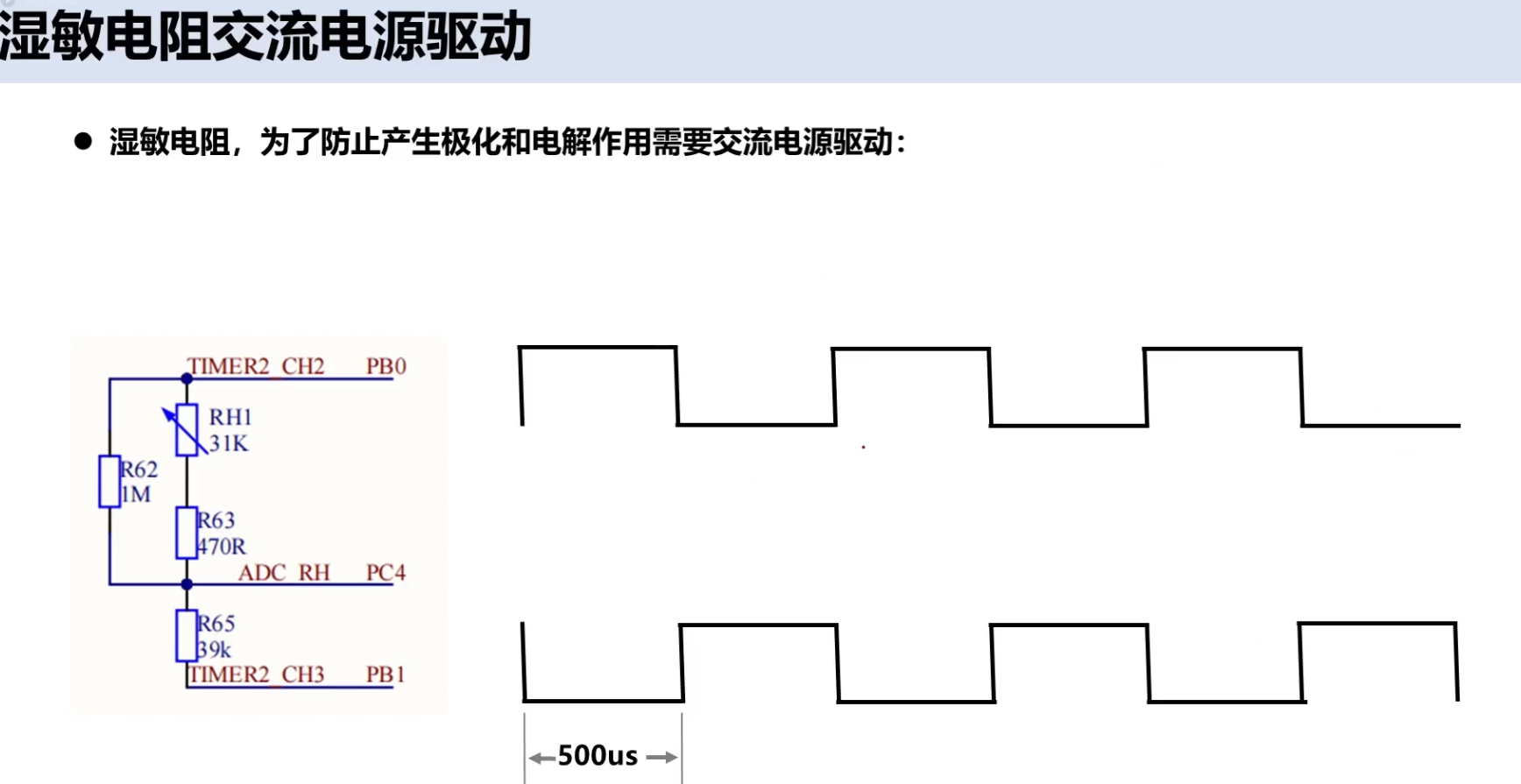
湿敏电阻驱动实现
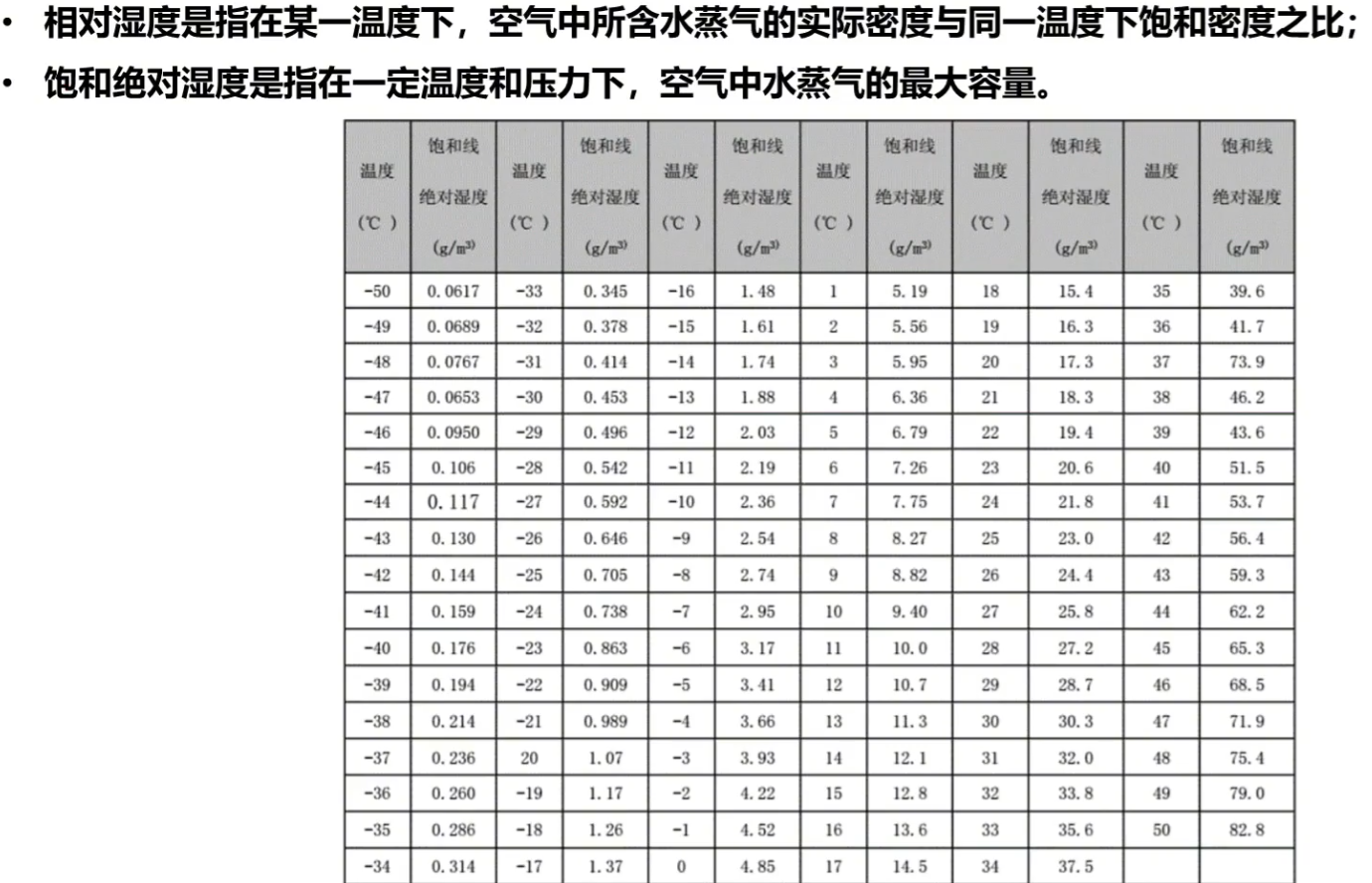
湿度和温度强相关的,我们要对不同温度下的湿度进行转换,如10C测量的湿度为50%,那11C时的湿度为(9.4*50%)/10 当前饱和曲线*湿度 / 要求的饱和曲线
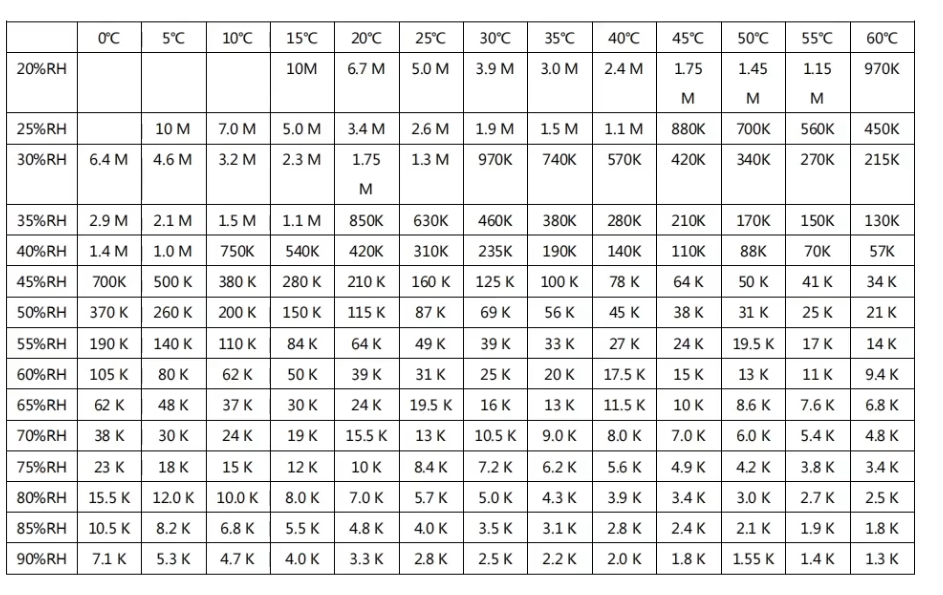
我们要用到二维数组 5为一格
假使我们要知道18摄氏度对应不同湿度的adc值,要怎么做呢?
算出该摄氏度的ADC数组
当前行tempRow = 18 / 5(间隔)
当前行tempRow +1 = 20
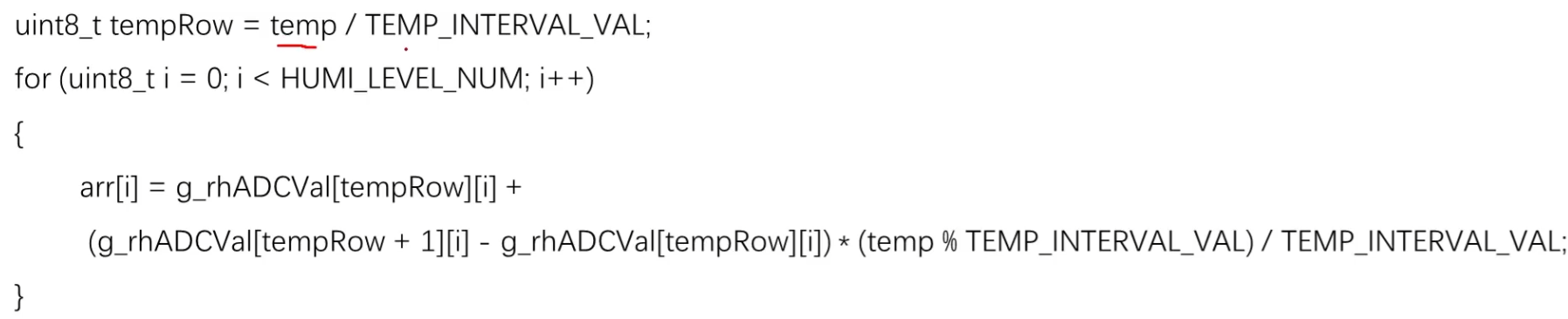
一组18个数据humi_LEVEL_NUM = 18;用for循环把18摄氏度每个湿度对应的值求出来,如(数组tempRow = 3,i = 0)的值 +
(tempRow = 4,i = 0)的值 -(数组tempRow = 3,i = 0)的值 * (温度% 间隔/ 间隔)
我们要根据adc的值来计算湿度
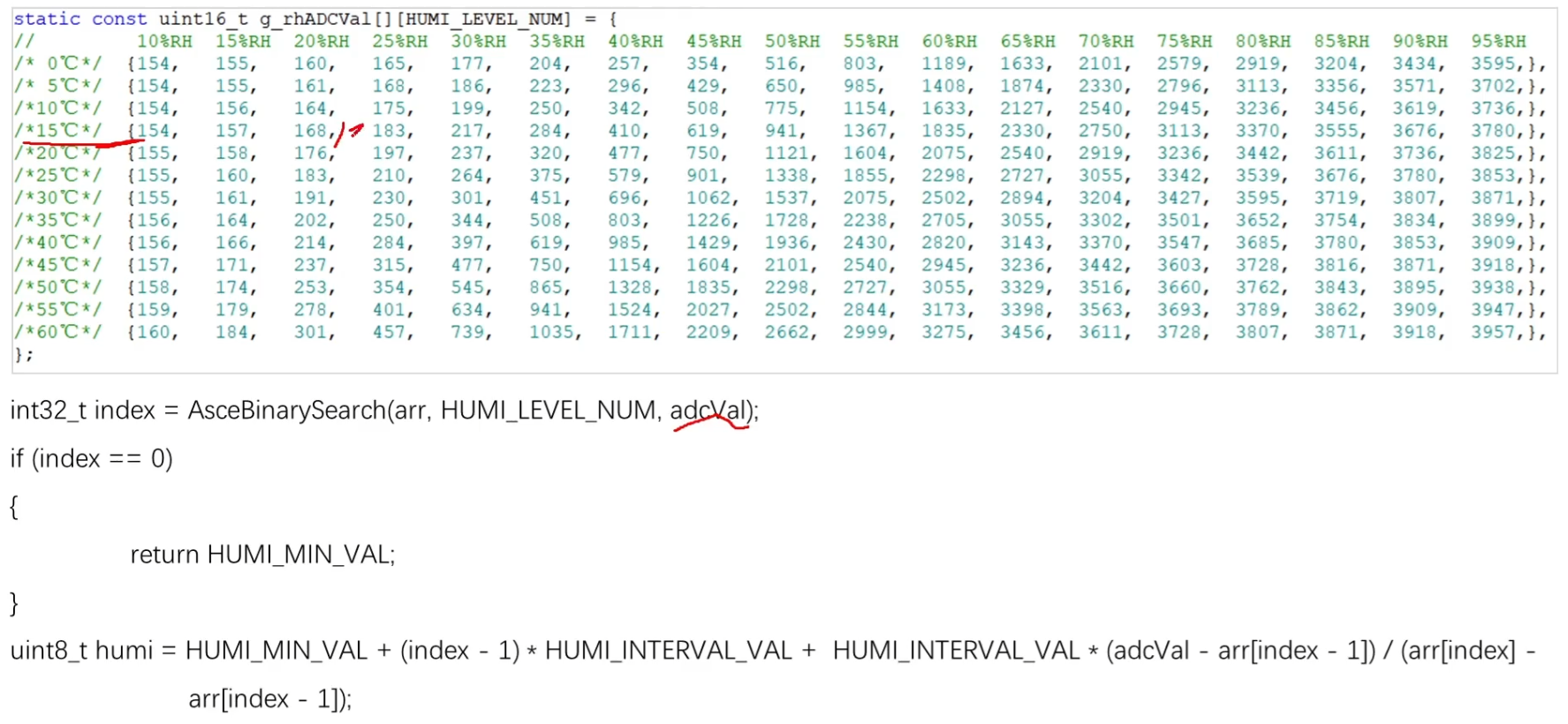
我们先用二分查找法,查找到靠近实际温度的index数值(第一个大于实际值的数据)
则index-1为left
我们用最小值10%RH + (index-1) * 5(间隔)+ 5(间隔)* (ADC的值 - index-1对应的值)/ (index对应的值 - index-1对应的值)
rh_drv.c
#include <stdint.h>
#include <string.h>
#include <stdio.h>
#include <stdlib.h>
#include <stdbool.h>
#include "gd32f30x.h"
#include "delay.h"
#include "led_drv.h"static uint16_t g_adcVal;
static uint8_t g_humiData;
#define HUMI_LEVEL_NUM 18
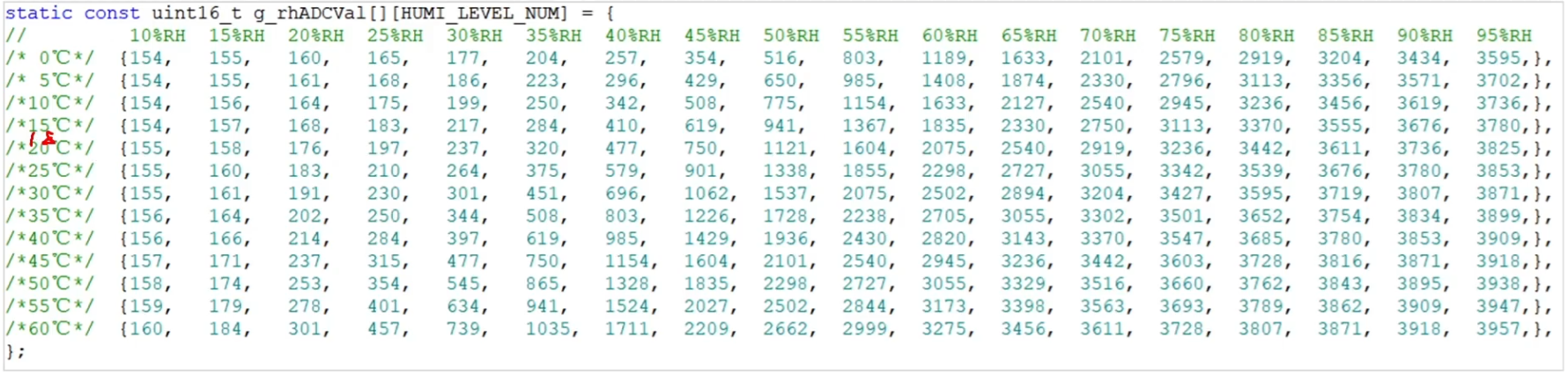
static const uint16_t g_rhADCVal[][HUMI_LEVEL_NUM] = {
// 10%RH 15%RH 20%RH 25%RH 30%RH 35%RH 40%RH 45%RH 50%RH 55%RH 60%RH 65%RH 70%RH 75%RH 80%RH 85%RH 90%RH 95%RH
/* 0℃*/ {154, 155, 160, 165, 177, 204, 257, 354, 516, 803, 1189, 1633, 2101, 2579, 2919, 3204, 3434, 3595,},
/* 5℃*/ {154, 155, 161, 168, 186, 223, 296, 429, 650, 985, 1408, 1874, 2330, 2796, 3113, 3356, 3571, 3702,},
/*10℃*/ {154, 156, 164, 175, 199, 250, 342, 508, 775, 1154, 1633, 2127, 2540, 2945, 3236, 3456, 3619, 3736,},
/*15℃*/ {154, 157, 168, 183, 217, 284, 410, 619, 941, 1367, 1835, 2330, 2750, 3113, 3370, 3555, 3676, 3780,},
/*20℃*/ {155, 158, 176, 197, 237, 320, 477, 750, 1121, 1604, 2075, 2540, 2919, 3236, 3442, 3611, 3736, 3825,},
/*25℃*/ {155, 160, 183, 210, 264, 375, 579, 901, 1338, 1855, 2298, 2727, 3055, 3342, 3539, 3676, 3780, 3853,},
/*30℃*/ {155, 161, 191, 230, 301, 451, 696, 1062, 1537, 2075, 2502, 2894, 3204, 3427, 3595, 3719, 3807, 3871,},
/*35℃*/ {156, 164, 202, 250, 344, 508, 803, 1226, 1728, 2238, 2705, 3055, 3302, 3501, 3652, 3754, 3834, 3899,},
/*40℃*/ {156, 166, 214, 284, 397, 619, 985, 1429, 1936, 2430, 2820, 3143, 3370, 3547, 3685, 3780, 3853, 3909,},
/*45℃*/ {157, 171, 237, 315, 477, 750, 1154, 1604, 2101, 2540, 2945, 3236, 3442, 3603, 3728, 3816, 3871, 3918,},
/*50℃*/ {158, 174, 253, 354, 545, 865, 1328, 1835, 2298, 2727, 3055, 3329, 3516, 3660, 3762, 3843, 3895, 3938,},
/*55℃*/ {159, 179, 278, 401, 634, 941, 1524, 2027, 2502, 2844, 3173, 3398, 3563, 3693, 3789, 3862, 3909, 3947,},
/*60℃*/ {160, 184, 301, 457, 739, 1035, 1711, 2209, 2662, 2999, 3275, 3456, 3611, 3728, 3807, 3871, 3918, 3957,},
};
#define TEMP_INTERVAL_VAL 5
#define HUMI_INTERVAL_VAL 5
#define HUMI_MAX_VAL 95
#define HUMI_MIN_VAL 10
#define TEMP_MAX_VAL 60static void GpioInit(void)
{rcu_periph_clock_enable(RCU_GPIOC);gpio_init(GPIOC, GPIO_MODE_AIN, GPIO_OSPEED_MAX, GPIO_PIN_4); // ADC通道14rcu_periph_clock_enable(RCU_GPIOB);gpio_init(GPIOB, GPIO_MODE_OUT_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_0 | GPIO_PIN_1); // 交流电源激励gpio_bit_write(GPIOB, GPIO_PIN_0, (bit_status)1);gpio_bit_write(GPIOB, GPIO_PIN_1, (bit_status)0);
}static void AdcInit(void)
{/* 使能时钟;*/rcu_periph_clock_enable(RCU_ADC1);/* 设置分频系数;*/rcu_adc_clock_config(RCU_CKADC_CKAPB2_DIV6); // 6分频,120MHz / 6 = 20MHz/* 设置独立模式;*/adc_mode_config(ADC_MODE_FREE);/* 设置单次模式;*/ adc_special_function_config(ADC1, ADC_CONTINUOUS_MODE, DISABLE);/* 设置数据对齐;*/adc_data_alignment_config(ADC1, ADC_DATAALIGN_RIGHT);/* 设置转换通道个数;*/ adc_channel_length_config(ADC1, ADC_REGULAR_CHANNEL, 1);/* 设置转换哪一个通道以及所处序列位置;*/ adc_regular_channel_config(ADC1, 0, ADC_CHANNEL_14, ADC_SAMPLETIME_71POINT5); // PC4对应通道14,放在序列寄存器的0序列中,71.5个周期/* 设置选择哪一个外部触发源;*/ adc_external_trigger_source_config(ADC1, ADC_REGULAR_CHANNEL, ADC0_1_2_EXTTRIG_REGULAR_NONE);/* 使能外部触发;*/ adc_external_trigger_config(ADC1, ADC_REGULAR_CHANNEL, ENABLE);/* 使能硬件滤波;*/
// adc_oversample_mode_config(ADC1, ADC_OVERSAMPLING_ALL_CONVERT, ADC_OVERSAMPLING_SHIFT_4B, ADC_OVERSAMPLING_RATIO_MUL16);
// adc_oversample_mode_enable(ADC1);/* 使能ADC;*/ adc_enable(ADC1);/* 内部校准;*/ DelayNus(50);adc_calibration_enable(ADC1);
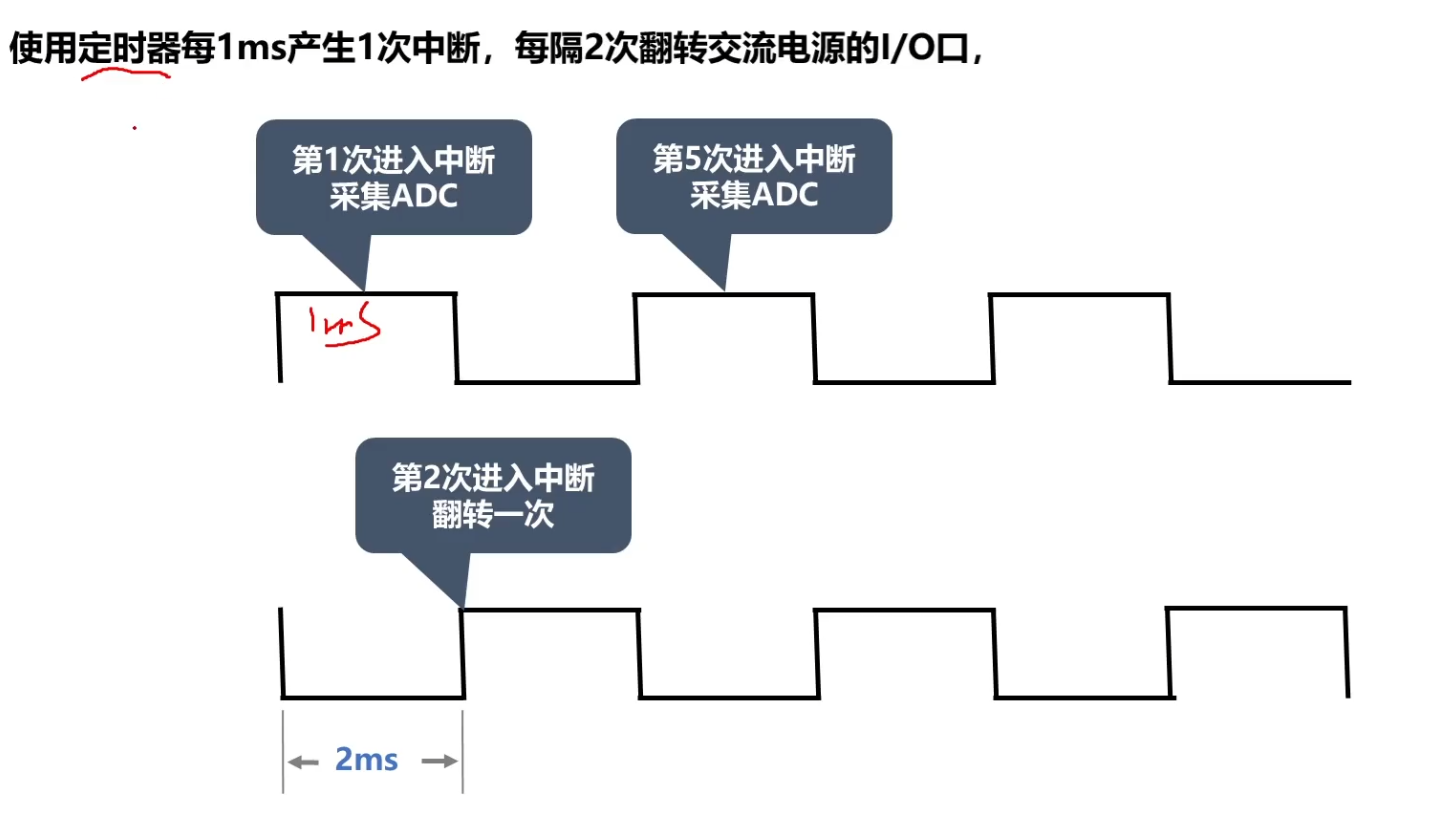
}static void TimerInit(uint32_t periodUs)
{/* 使能定时器时钟;*/rcu_periph_clock_enable(RCU_TIMER4);/* 复位定时器;*/timer_deinit(TIMER4);timer_parameter_struct timerInitPara;timer_struct_para_init(&timerInitPara);/* 设置预分频器值;*/timerInitPara.prescaler = 120 - 1; // 输入给计数器的时钟频率为1Mhz,周期1us/* 设置自动重装载值;*/ timerInitPara.period = periodUs - 1;timer_init(TIMER4, &timerInitPara);/* 使能定时器的计数更新中断;*/timer_interrupt_enable(TIMER4, TIMER_INT_UP);/* 使能定时器中断和优先级;*/nvic_irq_enable(TIMER4_IRQn, 0, 0);/* 使能定时器;*/ timer_enable(TIMER4);
}/**
***********************************************************
* @brief 湿度传感器驱动初始化
* @param
* @return
***********************************************************
*/
void HumiDrvInit(void)
{GpioInit();AdcInit();TimerInit(1000);
}static uint16_t GetAdcVal(void)
{adc_software_trigger_enable(ADC1, ADC_REGULAR_CHANNEL);/* 等待转换完成标志 */while(!adc_flag_get(ADC1, ADC_FLAG_EOC));/* 读取数据寄存器 */return (adc_regular_data_read(ADC1));
}static void AcPowerProc(void)
{gpio_bit_write(GPIOB, GPIO_PIN_0, (FlagStatus)((FlagStatus)1 - gpio_output_bit_get(GPIOB, GPIO_PIN_0)));gpio_bit_write(GPIOB, GPIO_PIN_1, (FlagStatus)((FlagStatus)1 - gpio_output_bit_get(GPIOB, GPIO_PIN_1)));
}void TIMER4_IRQHandler(void)
{static uint16_t g_timCount = 0;if (timer_interrupt_flag_get(TIMER4, TIMER_INT_FLAG_UP) == SET){timer_interrupt_flag_clear(TIMER4, TIMER_INT_FLAG_UP);g_timCount++;
// if (g_timCount == 1)
// {
// g_adcVal = GetAdcVal();
// }
// if (g_timCount == 2)
// {
// AcPowerProc();
// }
// if (g_timCount == 4)
// {
// AcPowerProc();
// g_timCount = 0;
// }if (g_timCount % 2 == 0) // 每2ms反转IO口{AcPowerProc();}if (g_timCount % 400 == 1) // 每隔400ms,在高电平中间位置获取一次ADC的数据{g_adcVal = GetAdcVal();}}
}
/**
***********************************************************
* @brief 根据温度计算湿度传感器的ADC值
* @param arr:输出数组,用于存储计算后的ADC值
* @param temp:当前温度(单位:℃)
* @return 无
***********************************************************
*/
static void CalcHumiAdcByTemp(uint16_t *arr, uint8_t temp)
{// 计算温度所在的行号(每行对应一个温度区间)uint8_t tempRow = temp / TEMP_INTERVAL_VAL;// 如果温度正好是温度区间的整数倍if (temp % TEMP_INTERVAL_VAL == 0){// 直接复制对应行的ADC值到输出数组memcpy(arr, &g_rhADCVal[tempRow][0], HUMI_LEVEL_NUM * sizeof(uint16_t));return;}// 如果温度不是温度区间的整数倍,需要插值计算for (uint8_t i = 0; i < HUMI_LEVEL_NUM; i++) // 遍历每个湿度级别{// 线性插值计算当前温度下的ADC值arr[i] = g_rhADCVal[tempRow][i] + (g_rhADCVal[tempRow + 1][i] - g_rhADCVal[tempRow][i]) * (temp % TEMP_INTERVAL_VAL) / TEMP_INTERVAL_VAL;}
}
/**
***********************************************************
* @brief 升序数组的二分查找
* @param arr:升序数组
* @param size:数组的大小
* @param key:要查找的目标值
* @return 返回数组中与目标值最接近的元素的索引
***********************************************************
*/
static int32_t AsceBinarySearch(const uint16_t *arr, int32_t size, uint16_t key)
{int32_t left = 0; // 左边界初始化为数组的起始位置int32_t right = size - 1; // 右边界初始化为数组的最后一个位置int32_t mid; // 用于存储中间位置int32_t index = size - 1; // 初始化返回的索引为数组的最后一个位置while (left <= right) // 当左边界小于等于右边界时,继续查找{mid = left + (right - left) / 2; // 计算中间位置,防止溢出if (key <= arr[mid]) // 如果目标值小于等于中间值{right = mid - 1; // 更新右边界为中间位置的前一个位置index = mid; // 更新最接近的索引为中间位置}else // 如果目标值大于中间值{left = mid + 1; // 更新左边界为中间位置的后一个位置}}return index; // 返回最接近的索引
}
/**
***********************************************************
* @brief 将ADC值转换为湿度值
* @param arr:存储湿度对应的ADC值的数组
* @param adcVal:当前的ADC值
* @return 湿度值(单位:%RH)
***********************************************************
*/
static uint8_t AdcToHumi(uint16_t *arr, uint16_t adcVal)
{// 使用二分查找找到最接近的ADC值的索引int32_t index = AsceBinarySearch(arr, HUMI_LEVEL_NUM, adcVal);// 如果索引为0,直接返回最小湿度值if (index == 0){return HUMI_MIN_VAL;}// 线性插值计算湿度值uint8_t humi = HUMI_MIN_VAL + (index - 1) * HUMI_INTERVAL_VAL + HUMI_INTERVAL_VAL * (adcVal - arr[index - 1]) / (arr[index] - arr[index - 1]);return humi;
}
/**
***********************************************************
* @brief 触发驱动转换湿度传感器数据
* @param temp:当前温度(单位:℃)
* @return 无
***********************************************************
*/
void HumiSensorProc(uint8_t temp)
{// 如果温度超过最大值,限制为最小温度区间if (temp > TEMP_MAX_VAL){temp = TEMP_INTERVAL_VAL;}// 计算当前温度下的ADC值uint16_t humiAdcBuf[HUMI_LEVEL_NUM];CalcHumiAdcByTemp(humiAdcBuf, temp);// 将ADC值转换为湿度值g_humiData = AdcToHumi(humiAdcBuf, g_adcVal);
}/**
***********************************************************
* @brief 获取湿度传感器数据
* @param
* @return 湿度数据,整数
***********************************************************
*/
float GetHumiData(void)
{return g_humiData;
}
rh_drv.h
#ifndef _RH_DRV_H_
#define _RH_DRV_H_#include <stdint.h>
/**
***********************************************************
* @brief 湿度传感器驱动初始化
* @param
* @return
***********************************************************
*/
void HumiDrvInit(void);/**
***********************************************************
* @brief 触发驱动转换湿度传感器数据
* @param
* @return
***********************************************************
*/
void HumiSensorProc(uint8_t temp);/**
***********************************************************
* @brief 获取湿度传感器数据
* @param
* @return 湿度数据,整数
***********************************************************
*/
float GetHumiData(void);
#endifhmi_app.c
#include <stdint.h>
#include <stdio.h>
#include "rtc_drv.h"
#include "sensor_drv.h"/**
***********************************************************
* @brief 人机交互任务处理函数
* @param
* @return
***********************************************************
*/
void HmiTask(void)
{SensorData_t sensorData;GetSensorData(&sensorData);printf("\n temp is %.1f ,humi is %d.\n",sensorData.temp ,sensorData.humi);
}
sensor.c
#include "gd32f30x.h"
#include <stdio.h>
#include "sensor_drv.h"
#include "ntc.h"
#include "rh_drv.h"/**
***********************************************************
* @brief 传感器硬件初始化
* @param
* @return
***********************************************************
*/
void SensorDvrInit(void)
{TempDrvInit();HumiDrvInit();
}/*
*********************************************
* @brief 获取传感器数据
* @param *sensorData,输出,传感器数据回写地址
* @return
*********************************************
*/
void GetSensorData(SensorData_t *sensorData)
{sensorData->temp = GetTempData();sensorData->humi = GetHumiData();
}/*
*********************************************
* @brief 触发转化传感器数据
* @param *sensorData,输出,传感器数据回写地址
* @return
*********************************************
*/
void SensorDvrProc(void)
{TempSensorProc();HumiSensorProc((uint8_t)GetTempData());
}