[光学原理与应用-361]:ZEMAX - 分析 - 像差分析
在ZEMAX中,像差分析是评估光学系统性能的核心步骤,通过识别和量化像差,可指导系统优化。以下是ZEMAX中主要像差的分析方法及优化策略:
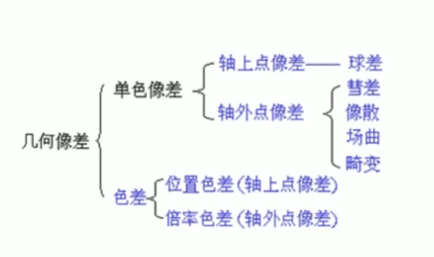
一、ZEMAX中的主要像差类型
1.1 单色像差
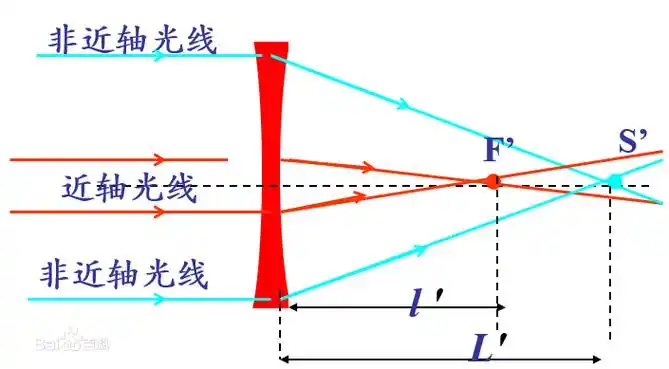
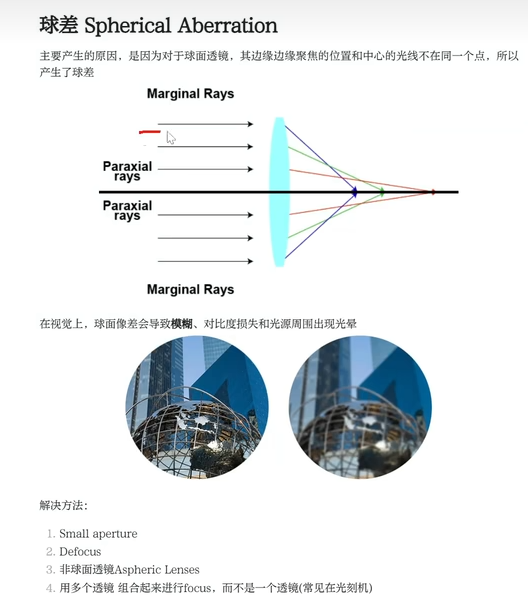
- 球差(Spherical Aberration:球面弯曲造成的像差):轴上(理想)物点发出的光束通过球面透镜时,不同孔径区域的光线汇聚在不同位置,形成圆形弥散斑。球差与镜面直径的四次方成正比(镜面直径小于曲面直径,镜面直径越大,离中心的距离越远,球差越大),与焦长的三次方成反比(焦距越长,比如无限长,球差越小;焦距越小,对光线弯曲的程度越大,球差越大),在低焦比(如f/10以下)系统中尤为明显。
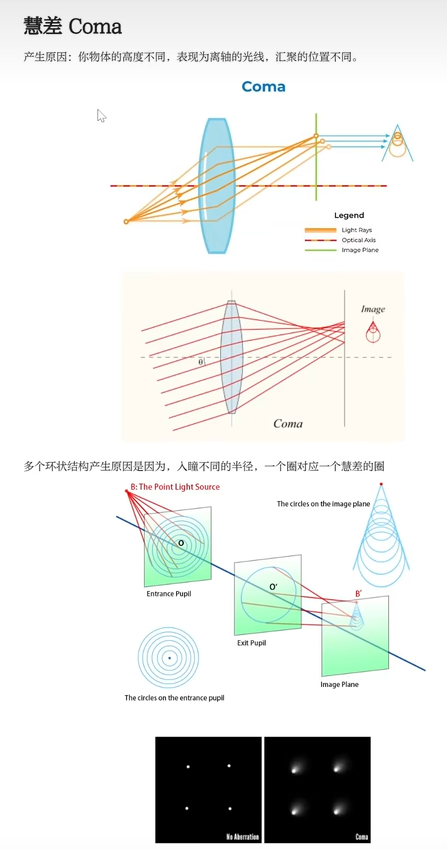
- 慧差(Comatic Aberration):轴外物点发出的锥形光束通过光学系统后,在理想像面形成彗星状光斑。慧差与孔径和视场均有关,对大孔径系统和望远系统影响较大。
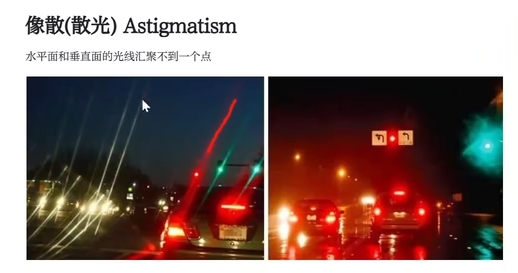
- 像散(Astigmatism):轴外物点发出的光束与光轴有倾斜角时,子午细光束与弧矢细光束的汇聚点不在同一位置,导致成像模糊。像散表现为子午方向和弧矢方向光斑聚焦的不一致性。
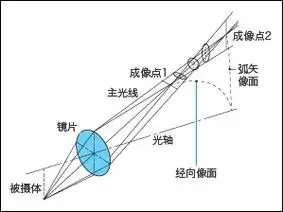
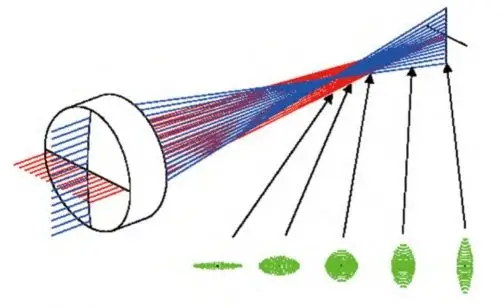
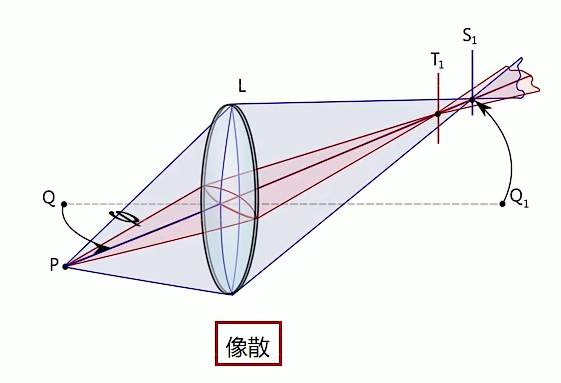
空间属性,不同方向,其焦点不汇集在同一个点。
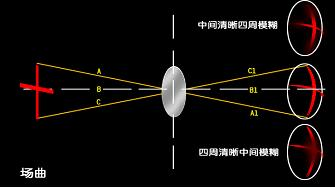
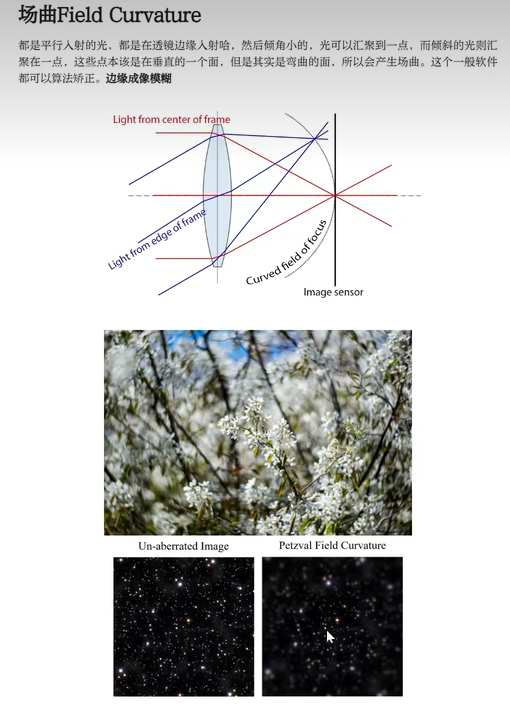
- 场曲(Field Curvature):平面物体通过透镜系统后,所有平面物点聚焦后的像面不与理想平面重合,而是呈现为一个弯曲的像面。场曲导致影像的清晰度从中央向外发生变化。
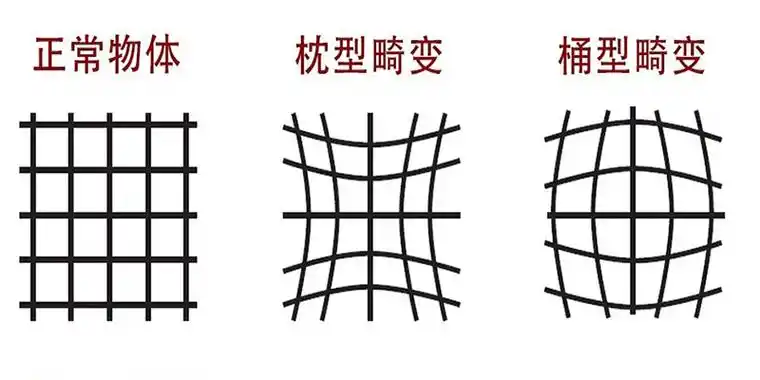
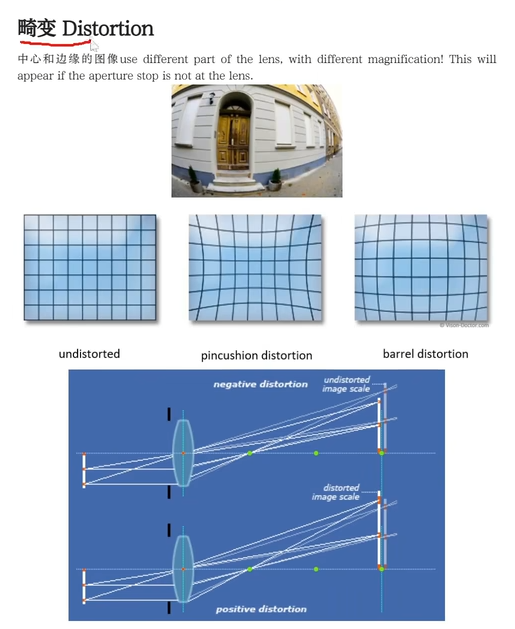
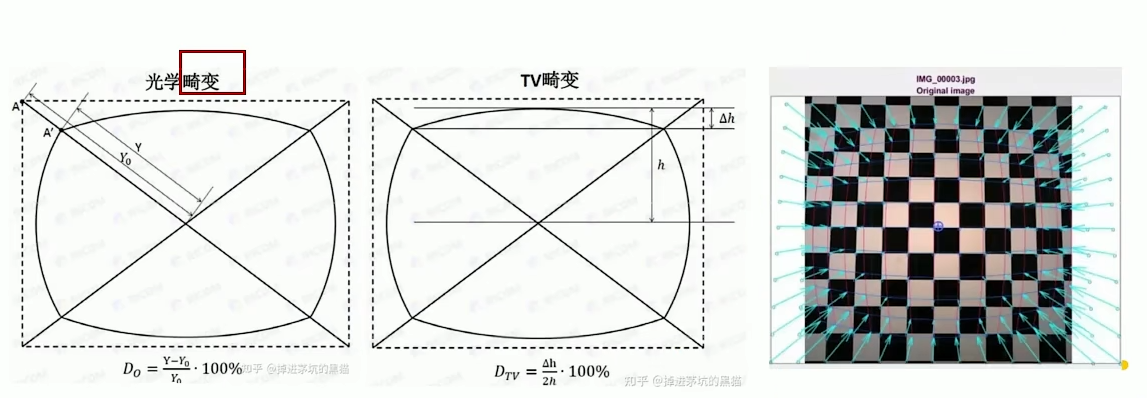
- 畸变(Distortion):物体通过镜头成像时,实际像面与理想像面间产生的形变。畸变分为正畸变(枕形畸变)和负畸变(桶形畸变),不影响像质的清晰度,但会使物体的像产生形变。
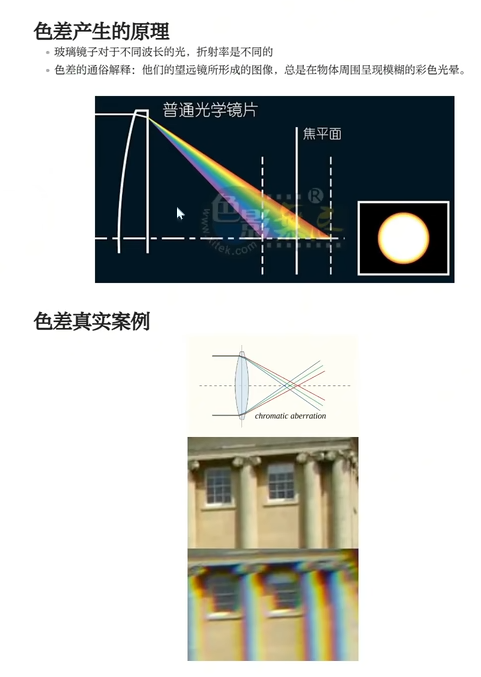
1.2 色差(颜色差,即波长差,频率差)
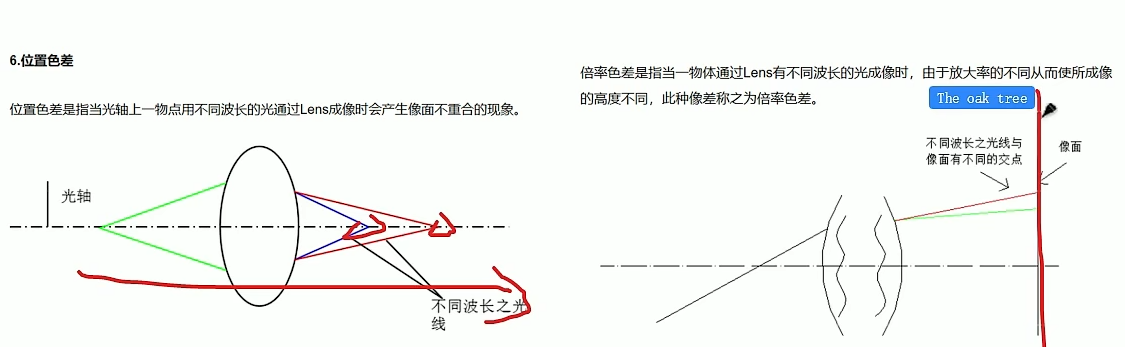
- 轴向色差(Longitudinal Chromatic Aberration):不同波长的光束通过透镜后焦点位于沿轴的不同位置,导致成像产生色斑。
- 垂轴色差(Lateral Chromatic Aberration):轴外视场不同波长光束通过透镜聚焦后在像面上高度各不相同,导致成像产生颜色分离。
二、ZEMAX中的像差分析工具
- 点列图(Spot Diagram)
- 显示光线在像面上的分布情况,通过RMS半径和GEO半径量化像差大小。RMS半径反映光斑的平均扩散程度,GEO半径反映光斑的最大扩散范围。
- 应用:评估系统像差对成像质量的影响,识别主要像差类型(如球差、慧差等)。
- Ray Fan图(光线扇形图)
- 反馈子午和弧矢两个方向的垂轴像差,通过辅助线斜率、截距等参数判断像差种类和大小。
- 判断方法:
- 若辅助线A和辅助线B之间有夹角,则存在球差;夹角越大,球差越大。
- 若辅助线A和辅助线B在原点存在截距差,则存在慧差;截距差越大,慧差越大。
- 若子午和弧矢垂轴像差图中辅助线B斜率存在差值,则存在像散;差值越大,像散越大。
- 若子午垂轴像差图中辅助线B存在斜率,则存在场曲;斜率越大,场曲越大。
- 若辅助线B存在截距,则存在畸变;截距越大,畸变越大。
- 场曲/畸变图(Field Curvature/Distortion)
- 显示系统场曲和畸变随视场的变化情况,帮助评估像面弯曲和形变程度。
- 应用:优化视场光阑位置或采用对称结构来减小场曲和畸变。
- 色差曲线(Chromatic Aberration Curves)
- 显示不同波长光线的焦点位置差异,量化轴向色差和垂轴色差。
- 应用:选择低色散材料或使用消色差透镜组合来减小色差。
三、ZEMAX中的像差优化策略
- 球差的优化
- 凹凸透镜补偿法:凸透镜提供正球差,凹透镜提供负球差,通过组合使用可以相互补偿。
- 非球面镜:使用非球面镜可以有效消除球差。
- 优化方法:在ZEMAX中使用LONA和SPHA操作数控制球差,设置合理的权重进行优化。
- 慧差的优化
- 调整视场光阑位置:通过调整光阑与镜头的相对位置来优化慧差大小。
- 使用对称光学系统:如库克三片物镜、双高斯照相物镜等,将光阑置于镜头组中间使光阑两边对称。
- 优化方法:在ZEMAX中使用COMA操作数控制慧差,结合光线扇形图分析结果进行调整。
- 像散的优化
- 调节视场光阑位置:通常光视场光阑远离镜头组时像散会减小。
- 使用对称结构:如前述慧差优化方法中的对称光学系统,可以同时校正像散。
- 优化方法:在ZEMAX中使用ASTI操作数控制像散,结合场曲/畸变图分析结果进行调整。
- 场曲的优化
- 优化视场光阑位置:通过优化视场光阑的位置来减小场曲。
- 使用对称结构:如前述方法,可以有效减小场曲。
- 优化方法:在ZEMAX中使用FCGS和FCGT操作数控制子午场曲和弧矢场曲,结合场曲/畸变图分析结果进行调整。
- 畸变的优化
- 设置畸变目标值:在ZEMAX中可以通过设置DIMX和DISG操作数来控制畸变的大小。
- 优化镜组结构:通过优化镜组的结构和参数来减小畸变。
- 优化方法:结合场曲/畸变图分析结果,调整镜组曲率半径、厚度等参数。
- 色差的优化
- 使用低色散材料:选择具有低色散系数的透镜材料来减小色差。
- 使用消色差透镜组合:如消色差双胶合透镜等,通过组合不同折射率的透镜来消除色差。
- 优化方法:在ZEMAX中使用AXCL和AXDI操作数控制轴向色差和垂轴色差,结合色差曲线分析结果进行调整。
四、光线像差图
光线像差图是ZEMAX等光学设计软件中用于直观展示光学系统像差特性的重要工具,它通过绘制光线在像面上的分布或偏移情况,帮助设计师快速识别和量化像差类型及大小。
以下是光线像差图的详细解析:
1、光线像差图的核心类型及功能
- 光线扇形图(Ray Fan图)
- 功能:展示子午(Tangential)和弧矢(Sagittal)方向光线在像面上的垂轴像差分布,辅助判断像差类型(如球差、慧差、像散等)。
- 关键参数:
- 辅助线斜率:反映像差随孔径或视场的变化率。
- 截距差:反映像差在原点处的偏移量。
- 典型应用:
- 若子午和弧矢方向辅助线斜率存在差异,可能存在像散。
- 若辅助线在原点存在截距差,可能存在慧差。
- 光线像差曲线(Ray Aberration Curves)
- 功能:显示不同视场或孔径位置光线在像面上的实际位置与理想位置的偏差,量化像差大小。
- 关键参数:
- X轴:通常表示归一化孔径(如0到1)或视场角。
- Y轴:表示光线在像面上的垂轴偏差(单位:毫米或微米)。
- 典型应用:
- 评估系统在不同视场或孔径下的像差表现。
- 识别像差随视场或孔径的变化趋势。
- 点列图(Spot Diagram)
- 功能:以离散点形式展示光线在像面上的分布,通过RMS半径和GEO半径量化像差对成像质量的影响。
- 关键参数:
- RMS半径:反映光斑的平均扩散程度,越小表示成像越清晰。
- GEO半径:反映光斑的最大扩散范围,用于评估极端情况下的像差。
- 典型应用:
- 快速评估系统整体像差水平。
- 比较不同设计方案的成像质量。
2、光线像差图的解读方法
- 识别像差类型
- 球差:在Ray Fan图中表现为子午和弧矢方向辅助线斜率一致,但整体偏移量随孔径增大而增加。
- 慧差:在Ray Fan图中表现为子午或弧矢方向辅助线在原点存在截距差,且偏移量随孔径增大而线性增加。
- 像散:在Ray Fan图中表现为子午和弧矢方向辅助线斜率存在差异,导致像面在不同方向上聚焦不一致。
- 场曲:在光线像差曲线中表现为不同视场下光线偏差随视场角变化,且子午和弧矢方向偏差趋势一致但大小不同。
- 畸变:在光线像差曲线中表现为不同视场下光线偏差随视场角变化,但方向与视场角相关(如桶形畸变或枕形畸变)。
- 量化像差大小
- Ray Fan图:通过辅助线斜率或截距差计算像差系数(如球差系数、慧差系数等)。
- 光线像差曲线:直接读取不同视场或孔径下的光线偏差值,作为优化目标。
- 点列图:通过RMS半径和GEO半径评估像差对成像质量的影响程度。
- 评估系统性能
- 成像清晰度:RMS半径越小,成像越清晰。
- 能量集中度:点列图中光线分布越集中,能量利用率越高。
- 视场均匀性:光线像差曲线在不同视场下的表现是否一致,反映系统视场均匀性。
3、光线像差图在优化中的应用
- 像差校正目标设定
- 根据系统性能要求(如分辨率、对比度等),设定合理的像差校正目标(如RMS半径<5μm)。
- 结合Ray Fan图和光线像差曲线,识别主要像差类型并确定优化优先级。
- 优化策略制定
- 球差校正:采用非球面镜或凹凸透镜组合。
- 慧差校正:调整视场光阑位置或使用对称结构。
- 像散校正:优化镜组曲率半径或厚度。
- 场曲校正:采用对称结构或优化视场光阑位置。
- 畸变校正:通过优化镜组结构或设置畸变目标值(如DIMX操作数)。
- 优化结果验证
- 通过重新生成光线像差图,验证优化后像差是否满足设计要求。
- 结合点列图和MTF(调制传递函数)分析,综合评估系统性能提升效果。
4、光线像差图的实际案例
- 手机摄像头镜头优化
- 初始设计:Ray Fan图显示存在明显慧差和像散,导致边缘视场成像模糊。
- 优化措施:调整非球面镜系数并优化镜组厚度,使慧差和像散显著减小。
- 优化结果:RMS半径从10μm减小至5μm,MTF在50lp/mm处提升至0.3以上。
- 天文望远镜设计
- 初始设计:光线像差曲线显示存在较大场曲,导致视场边缘像面弯曲。
- 优化措施:采用对称结构并优化视场光阑位置,使场曲减小至可接受范围。
- 优化结果:场曲半径从10mm减小至2mm,视场边缘成像清晰度显著提升。