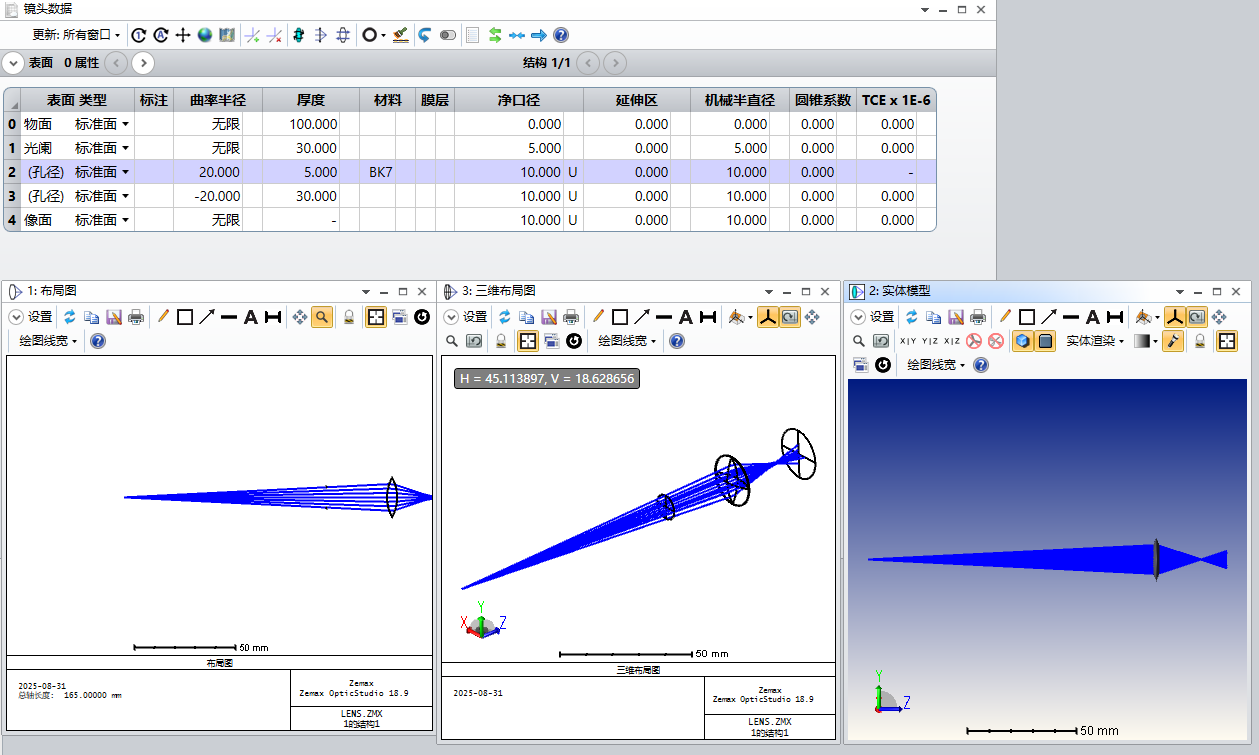
[光学原理与应用-353]:ZEMAX - 设置 - 可视化工具:2D视图、3D视图、实体模型三者的区别,以及如何设置光线的数量
在光学设计软件ZEMAX中,2D视图、3D视图和实体模型是三种不同的可视化工具,分别用于从不同维度展示光学系统的结构、布局和物理特性。它们的核心区别体现在维度、功能、应用场景及信息呈现方式上,以下是详细对比:
一、维度与信息呈现
| 特性 | 2D视图 | 3D视图 | 实体模型 |
|---|---|---|---|
| 维度 | 二维平面投影(如X-Y、X-Z平面) | 三维立体空间(可旋转、缩放) | 三维实体化模型(含物理属性) |
| 信息层次 | 仅显示几何轮廓和相对位置 | 展示空间布局和光线传播路径 | 模拟真实物理特性(如材料、表面处理) |
| 数据依赖 | 基于镜头数据编辑器(LDE)的参数 | 基于LDE参数 + 光线追迹结果 | 基于LDE参数 + 材料数据库 + 机械结构 |
二、功能与应用场景
1. 2D视图:快速布局与参数验证
- 功能:
- 以平面投影形式展示光学系统的侧面或俯视图,支持标注关键参数(如曲率半径、厚度、直径)。
- 可叠加光线追迹结果(如近轴光线、实际光线),验证系统布局是否合理。
- 应用场景:
- 初步设计阶段:快速检查透镜排列顺序、间距和孔径匹配。
- 公差分析:通过标注公差范围(如厚度公差TTHI),评估制造可行性。
- 示例:
- 在双胶合透镜设计中,用2D视图确认两片透镜的曲率半径和胶合层厚度是否符合设计要求。
- 在反射镜系统中,用2D视图检查光路折叠角度是否满足机械安装空间限制。
2. 3D视图:空间关系与光线传播可视化
- 功能:
- 以交互式3D模型展示光学系统的空间布局,支持旋转、缩放和平移操作。
- 可叠加光线追迹结果(如实际光线、鬼像分析),直观显示光线在系统中的传播路径。
- 应用场景:
- 复杂系统设计:如手机镜头、显微镜物镜,需验证多透镜组的空间对齐和光线覆盖范围。
- 杂散光分析:通过3D视图观察鬼像或散射光的传播路径,优化系统结构以减少杂散光。
- 示例:
- 在卡塞格林望远镜设计中,用3D视图确认主镜和副镜的相对位置及光线反射路径。
- 在激光振镜系统中,用3D视图检查光束在非球面透镜上的入射角度和聚焦位置。
3. 实体模型:物理特性与制造仿真
- 功能:
- 将光学系统转换为实体化模型,包含材料属性(如折射率、阿贝数)、表面处理(如镀膜、磨边)和机械结构(如螺纹、卡槽)。
- 支持导出为STEP/IGES格式,用于机械加工或装配仿真。
- 应用场景:
- 制造准备:与CAD软件(如SolidWorks)集成,验证光学元件与机械结构的兼容性。
- 成本估算:通过实体模型计算材料用量和加工工时,优化设计以降低成本。
- 示例:
- 在手机镜头设计中,用实体模型检查透镜组的机械公差(如偏心、倾斜)是否满足装配要求。
- 在医疗内窥镜设计中,用实体模型模拟镜头与导光束的集成方式,确保空间利用率最大化。
三、操作与交互性
| 工具 | 操作方式 | 交互性 | 输出格式 |
|---|---|---|---|
| 2D视图 | 固定平面投影,支持缩放和标注 | 静态展示,无旋转功能 | 图片(PNG/JPG)、矢量图(SVG) |
| 3D视图 | 鼠标交互(旋转/缩放/平移) | 动态展示,支持光线追迹叠加 | 图片、3D PDF、交互式HTML |
| 实体模型 | 参数化建模 + 材料/机械属性分配 | 支持有限元分析(FEA)和装配仿真 | STEP、IGES、STL(3D打印) |
四、典型案例对比
案例1:手机镜头设计
- 2D视图:
- 展示5片透镜的排列顺序、厚度和孔径,确认总长(TOTR)<5mm。
- 标注各透镜的圆锥系数(Conic)和非球面系数,验证像差校正效果。
- 3D视图:
- 旋转模型观察光束在透镜组中的传播路径,检查边缘光线是否被遮挡。
- 叠加鬼像分析结果,优化镀膜方案以减少反射杂光。
- 实体模型:
- 导出STEP文件至SolidWorks,检查透镜组的机械公差(如偏心≤0.01mm)。
- 模拟装配过程,验证螺纹接口和卡槽的匹配性。
案例2:反射式望远镜设计
- 2D视图:
- 展示主镜和副镜的曲率半径、间距及光路折叠角度,确认符合设计焦距。
- 标注副镜的圆锥系数(K<−1),验证其为双曲面形状。
- 3D视图:
- 旋转模型观察光线从主镜反射到副镜,再聚焦到焦平面的路径。
- 检查副镜边缘是否遮挡主镜反射的光线。
- 实体模型:
- 分配铝材料属性(反射率>90%),模拟实际使用中的光能损失。
- 导出IGES文件至CNC机床,加工主镜和副镜的曲面。
五、选择建议
- 初步设计:优先使用2D视图快速验证布局和参数。
- 复杂系统优化:结合3D视图和光线追迹分析空间关系和杂散光。
- 制造准备:通过实体模型导出机械文件,确保设计与生产无缝衔接。
六、附录
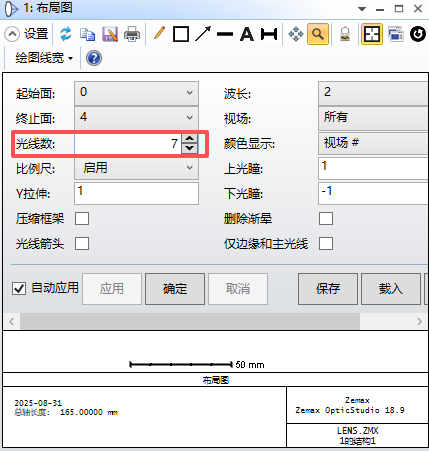
6.1 设置光学的数量
6.2 起始面与终止面
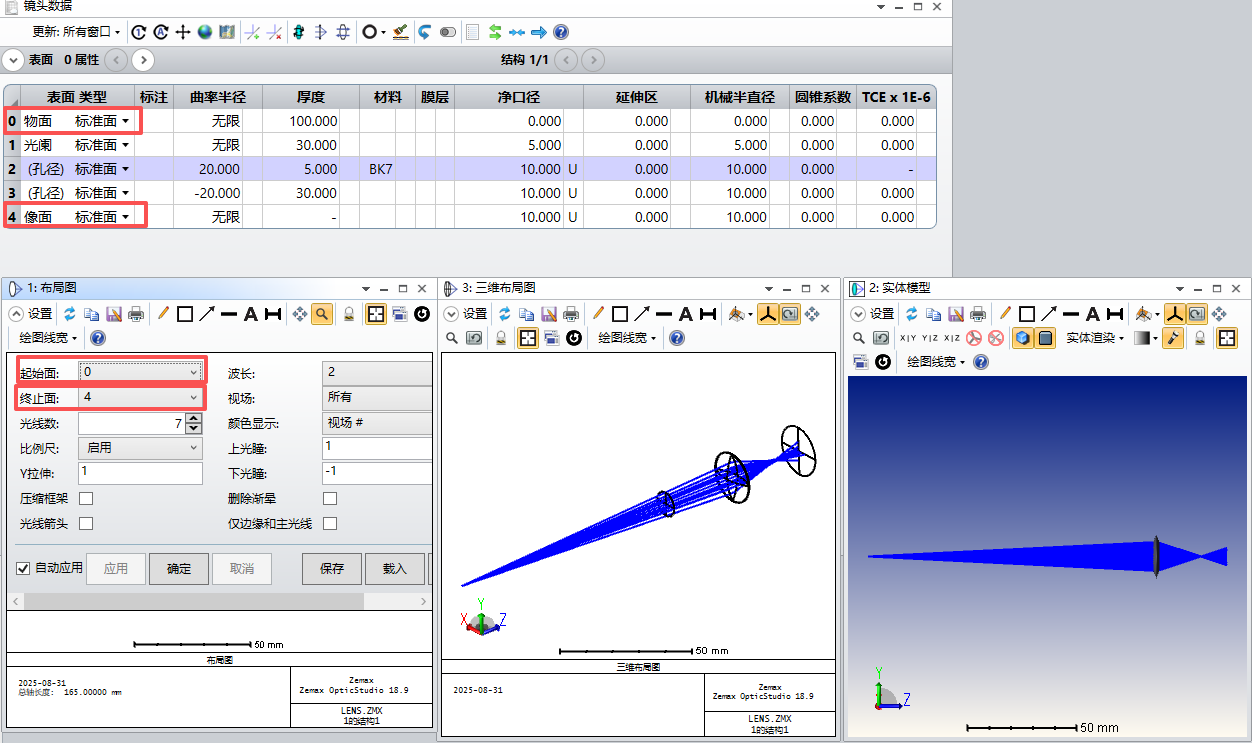
在光学系统设计中,起始面(Start Surface)和终止面(Stop Surface)是定义光线追迹范围、分析像差及优化系统的关键概念。它们不仅影响光线传播的边界,还直接关联到系统的性能评估。以下是两者的详细对比与实际应用解析:
1、定义与核心功能
| 特性 | 起始面 | 终止面 |
|---|---|---|
| 定义 | 光线追迹的起始位置,通常为物面或系统入口 | 光线追迹的终止位置,通常为像面或系统出口 |
| 核心功能 | 确定光线入射条件(如物距、孔径) | 定义系统输出边界(如像面位置、探测器尺寸) |
| 数学意义 | 光线追迹的初始参数(如 u,v,w 方向余弦) | 光线追迹的终止条件(如是否到达像面) |
2、关键区别与对比
1. 位置与作用
- 起始面:
- 位于系统最前端,可能是实物面(如光源)、虚拟物面(如无限远物点)或光阑面(如孔径光阑)。
- 示例:在显微镜系统中,起始面为样品表面;在望远镜系统中,起始面为无限远物点。
- 终止面:
- 位于系统最后端,通常是像面(如CCD传感器)、探测器或出射光瞳。
- 示例:在手机镜头系统中,终止面为图像传感器表面;在激光系统中,终止面为工作面(如切割点)。
2. 参数控制
- 起始面参数:
- 物距(Object Distance):定义物体到起始面的距离(正值为实物,负值为虚物)。
- 孔径类型(Aperture Type):控制入射光线的边界(如圆形、矩形、环形孔径)。
- 波长(Wavelength):设定光线追迹的光源波长(如可见光、红外光)。
- 终止面参数:
- 像面位置(Image Plane):定义光线聚焦的平面位置。
- 探测器尺寸(Detector Size):限制可接收光线的区域(如CCD的像素尺寸)。
- 像差分析范围(Field Height):定义视场范围(如全视场、半视场)。
3. 光线追迹逻辑
- 起始面到终止面:
- 光线从起始面出发,依次通过系统中的每个光学面(如透镜、反射镜),最终到达终止面。
- 示例:在卡塞格林望远镜中,光线从无限远物点(起始面)经主镜反射、副镜反射后,聚焦到像面(终止面)。
- 终止面反馈:
- 若光线未到达终止面(如被遮挡或发散),则视为无效光线,不参与像差分析。
- 示例:在激光切割系统中,若光线未聚焦到工作面(终止面),则切割效果失效。