【论文阅读】健全个体无辅助运动期间可穿戴传感器双侧下肢神经机械信号的基准数据集
Benchmark Datasets for Bilateral Lower-Limb Neuromechanical Signals from Wearable Sensors during Unassisted Locomotion in Able-Bodied Individuals
原文:DOI: 10.3389/frobt.2018.00014
2018年
翻译:靠岸学术
目录
1引言
2仪器设备设置
3数据采集协议
4后处理
5结果
6讨论
Keywords: gait, locomotion, biomechanics, electromyography, benchmark
关键词:步态,运动,生物力学,肌电图,基准
1引言
辅助机器人领域的可穿戴下肢辅助设备,包括机器人外骨骼、矫形器和假肢,在数量和功能上都经历了快速增长。这些设备已显示出通过提供运动辅助来恢复步态障碍患者运动功能的潜力。尽管许多设备已经在各种实际条件下表现出令人印象深刻的性能,但由于以下几个原因,客观地比较它们的性能和提高它们的可控性仍然具有挑战性。首先,研究中使用的结果指标(例如,关节运动学、代谢成本、临床评分和预测准确性)来证明使用辅助设备改善行走能力并不一致。其次,由于设备在机电设计和/或控制系统方面的限制,许多研究仅使用跑步机行走,或者没有收集来自各种运动活动的数据。第三,许多设备正处于商业化过程中,因此测试数据很少与研究界共享。此外,许多设备都实施了自己独特的控制框架,这些框架不够通用,无法方便地在其他硬件上实施。因此,我们期望改善在与行走相关的活动期间获取与设备无关的神经机械信号(研究人员可以从中开发和测试新的控制策略,然后再在硬件上实施)的途径,这对可穿戴下肢辅助设备领域将非常有价值。
同时,针对健全人在没有辅助设备的情况下进行生物力学步行的许多基准已经建立,其中一些是公开可用的。高分辨率生物力学步态分析的金标准是基于标记的光学运动捕捉与地面反作用力测量。几十年前,Winter (1983) 的开创性工作使用这些技术引入了不同速度下水平地面行走 (LW) 的主体间生物力学分析。他们的规范步态数据集包括肌电图 (EMG) 以及关节运动学和动力学模式,此后其他研究人员对其进行了扩展,以纳入更多的受试者和步幅(e.g., Kadaba et al., 1990;Kirtley, 2014)。其他常见运动活动(如上下楼梯和不同几何形状的倾斜表面)的稳态生物力学也已在单独的研究中使用类似技术进行了报告,但这些数据对研究人员的访问性较差(e.g., McFadyen and Winter, 1988;Riener et al., 2002;Lay et al., 2006, 2007;Protopapadaki et al., 2007;Franz et al., 2012)。
人体运动最精确的量化方法是使用传统的、基于实验室的仪器和为生物力学步态分析开发的技术,通过关节运动学、动力学和肌电图来实现。然而,可穿戴下肢机器人的令人兴奋的潜力在于,它有望使这些设备更贴近日常生活,这就需要替代技术来更普遍地测量与步行相关活动期间的神经机械信号。在人类活动识别(HAR)领域,已经开发出更自由地测量人体运动的方法,该领域旨在利用连续的传感器数据流来识别和监测常见的日常生活活动,如睡觉、走路、锻炼和操作物体。因此,HAR产生了大量公开可用的数据集。这些存储库很有价值,因为它们包含来自许多受试者的许多不同类型的活动信息;然而,它们不太适合对正常运动进行更系统的表征。有时,HAR数据集是从受损人群或在更自然但复杂的组合运动中收集的,这些运动的真实活动情况更加模糊。有些数据集是使用最少的仪器(例如,仅智能手机)收集的,这很方便,但不完整。相比之下,另一些数据集依赖于非便携式仪器(例如,光学运动捕捉或视频),这些仪器非常精确,但不能代表在更生态的环境中控制设备可访问的生物力学信号。此外,许多数据集仅包含单一模态(例如,运动学但没有肌电图),和/或使用较低的采样率,这可能不足以用于某些在线控制方案。
据我们所知,目前尚不存在一个公开可用的数据库,其中包含由健全个体在不同运动活动之间自由转换时,由可穿戴传感器同时记录的运动学和肌电图数据。为了解决上述一些局限性,并为可穿戴下肢辅助设备领域的研究人员提供相关的参考数据,我们引入了一个与设备无关的双边神经机械信号基准数据集,名为健全双边下肢运动信号百科全书(ENABL3S)。该数据集包含来自10名健全个体的双边肌电图以及关节和肢体运动学数据,这些数据由可穿戴传感器记录,记录对象在坐、站以及几种与行走相关的活动[平地、楼梯上升(SA)/楼梯下降(SD)和斜坡上升(RA)/斜坡下降(RD)]之间自由转换。尽管这些数据并非旨在取代现有的生物力学步态分析基准,但我们相信,通过提供更丰富的神经机械数据,这些数据是从可穿戴传感器收集的,并使用统一的协议针对几种不同的运动活动,它们仍然填补了这些基准和人类活动识别(HAR)数据集之间的空白。在本数据报告中,我们总结了我们对受试者进行仪器测量、收集数据以及进行伪影去除和步态分割的后处理方法。我们还总结了我们的协议所捕获的运动活动和转换类型,验证了我们的结果,并以关于该领域其他研究人员如何从该数据集中受益的建议作为结论。
2仪器设备设置
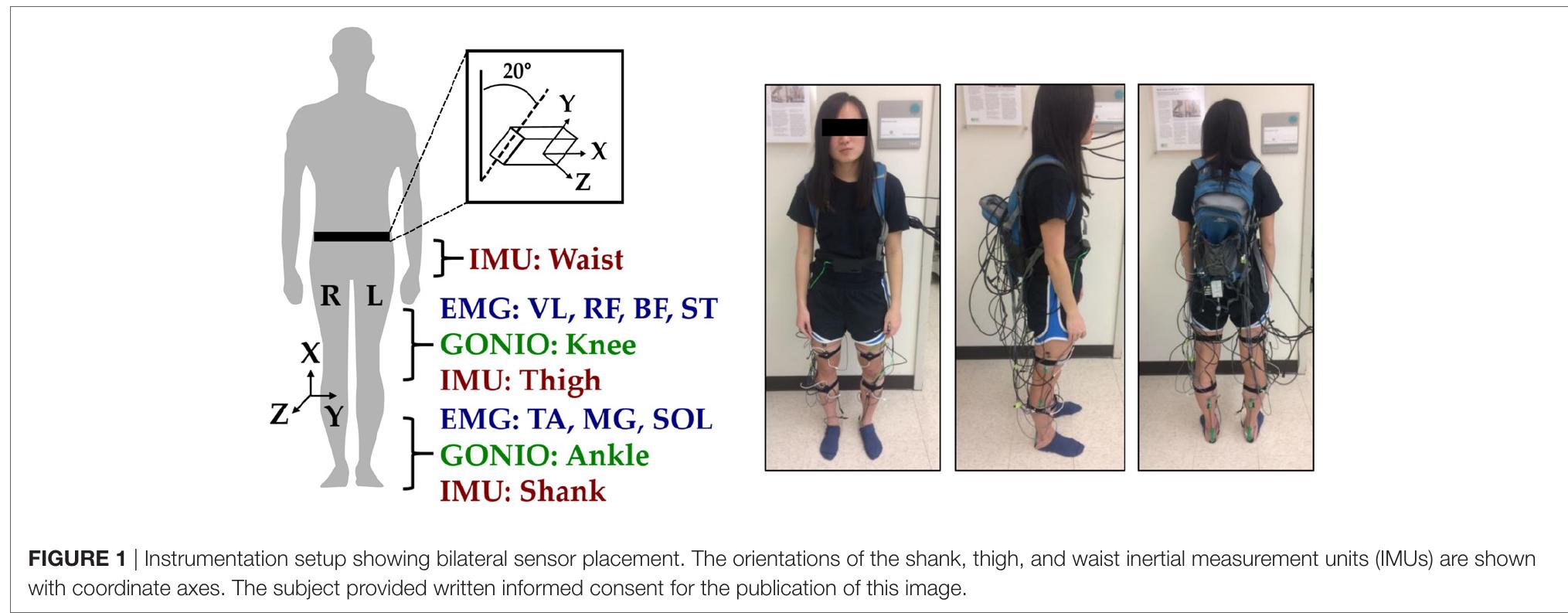
招募了十名健康的健全受试者(七名男性,三名女性;25.5 ± 2 岁;174 ± 12 厘米;70 ± 14 公斤),他们没有任何步态障碍,并在2017年1月至2月期间完成了以下实验流程。在行走之前,受试者佩戴了可穿戴传感器,以测量双侧下肢肌肉活动以及关节和肢体运动学。肌电图信号使用双极表面电极(DE2.1;Delsys,Boston,MA,USA)记录,来自每条腿的七块相同肌肉:胫骨前肌(TA)、腓肠肌内侧头(MG)、比目鱼肌(SOL)、股外侧肌(VL)、股直肌(RF)、股二头肌(BF)和半腱肌(ST)。选择这些肌肉是因为它们在一定程度上负责髋部和膝部的屈曲/伸展以及踝关节的跖屈/背屈,这些运动通常由可穿戴设备辅助。当从正面和背面面对受试者时,它们也相对容易定位。通过去除多余的毛发来准备肌肉部位,并用酒精擦拭轻轻擦洗皮肤。传感器用双面胶粘附在皮肤上。电极放置根据非侵入性肌肉评估表面肌电图标准通过触诊引导,并通过让受试者进行最大自主收缩(MVC)来验证。受试者对双腿进行了三次踝关节背屈/跖屈和膝关节屈曲/伸展的重复动作。肌电图信号被放大1,000×,硬件带通滤波在20至450 Hz之间(Bagnoli 16,Delsys),并以1 kHz的频率采样。
使用电子测角器(SG150;Biometrics Ltd.,Newport,UK)记录关节运动学信号(仅限矢状面),采样频率为500 Hz。在试验开始时,当受试者处于直立站立姿势时,测角器被归零。6自由度(三轴加速度计和陀螺仪)惯性测量单元(IMU)双侧放置在受试者的大腿(RF下方)和小腿(TA附近),采样频率为500 Hz(MPU-9250;Invensense,San Jose,CA,USA)。测角器和IMU使用双面胶、弹性带和Coban自粘绷带固定在受试者身上。另一个IMU放置在定制的皮套中(与垂直方向倾斜20°),并用腰带系在腰部。所有信号均通过定制的16位数据采集设备同时记录,该设备允许多速率采样。为了便于与我们的定制数据采集软件集成,所有可穿戴传感器都采用有线设置;缺点是,完全装备每条腿需要长达一个小时。图1显示了代表性受试者的完整仪器设置以及IMU方向。
3数据采集协议
在一个实验环节中,每个受试者都赤脚完成了大约25次循环,该循环包括坐(S)、站(St)、LW、以10°坡度上下斜坡(RA/RD)以及逐级上下四级楼梯(SA/SD)。选择这些活动是因为它们涵盖了社区步行中可能遇到的不同类型的地形,并且在一个20 . × 30 .的环路中完成。为实用性和增加重复次数留出空间。一个平台(30英寸高)连接楼梯(7.75″高,10英寸深)和斜坡(14 . 长),以允许这些活动之间所有可能的过渡。来自每个循环的数据被分成两个部分,并记录为单独的试验。奇数试验包括 S → St → LW → SA → LW → RD → LW → St → S。偶数试验包括 S → St → LW → RA → LW → SD → LW → St → S。每个连续片段的总步行距离约为45 .传感器需要重新定位或系绳缠绕的试验将被排除。受试者被指示以他们自己选择的速度自由地在运动活动之间过渡,并且定期进行休息以避免疲劳。实验者使用钥匙链标记受试者的真实运动意图。数据收集最多需要2小时。
4后处理
每条腿的足跟着地和脚趾离地步态事件通过寻找胫骨段矢状面角速度(GY)的峰值来可靠地识别,该角速度经过均值减去和低通滤波(一阶Butterworth滤波器,6 Hz),使用类似于Maqbool等人(2016)的基于阈值的方法。简而言之,首先使用角速度中最大的峰值来识别摆动中期的事件。通过搜索每个摆动中期事件之前的峰值来识别脚趾离地事件。通过搜索每个先前摆动中期事件之后的峰值来识别足跟着地事件。事件开关最初放置在每只脚的脚后跟和第一跖骨下方,但在我们的设置中触发了许多假阴性和假阳性,这可能是由于机械磨损和/或脚在楼梯上的放置。因此,它们仅用于验证基于IMU的分割技术。排除了受运动伪影(即,暂停和绊倒)破坏的步态事件。EMG信号经过高通滤波(六阶Butterworth滤波器,截止频率20 Hz)、低通滤波(六阶Butterworth滤波器,截止频率350 Hz)和陷波滤波(六阶Butterworth滤波器,带宽6 Hz),截止频率分别为60、180和300 Hz,以衰减运动伪影和环境干扰。测角仪和IMU信号分别经过低通滤波(六阶Butterworth滤波器),截止频率分别为10和25 Hz。关节速度通过对关节位置进行中心差分数值微分间接计算,并添加到测角仪通道中。
所有信号被分割成分析窗口,这些窗口从每个已识别的足跟着地或脚趾离地步态事件前300毫秒开始。使用了每个已识别步态事件附近的四个额外的300毫秒分析窗口(相对于每个事件延迟30、60、90和120毫秒)。对于每个窗口,我们提取了先前用于意图识别的特征,以控制动力膝踝假肢。测角仪和IMU通道的特征包括平均值、标准差、最大值、最小值、初始值和最终值(Varol et al., 2010)(每个通道六个特征)。EMG信号的特征包括平均绝对值、波形长度、过零点数量和斜率符号变化,以及六阶自回归模型的系数(Huang et al., 2005;Hargrove et al., 2008)(每个通道10个特征)。共有23个传感器(14个EMG,4个测角仪,5个IMU),52个通道(14个EMG,8个测角仪,30个IMU)和368个特征(140个EMG,48个测角仪,180个IMU)。
5结果
数据以CSV格式保存在特定于被试的文件夹中,可从Figshare下载,地址为https://doi.org/10。
存在一个元数据文件,其中编录了每个测角仪通道的文件名、汇总统计信息(平均值、标准差、最小值、最大值),以及每个电路的每个肌电图通道的信噪比[最大值与基线均方根(RMS)电压之比]。受试者特定文件夹还包括来自各个电路的原始和处理数据的文件夹、包含来自MVC试验期间所有肌肉的处理后肌电图信号的文件夹,以及包含从五个不同的300毫秒分析窗口(从为每条腿识别的步态事件之前300、270、240、210和180毫秒开始)提取的特征的文件夹。来自各个电路的数据还包含指定真实运动活动标签、足跟接触和脚趾离地步态事件的索引以及表示输出和输入运动活动和步态阶段的四位触发器的列。每个文件的第一行是指定列顺序的标题。尽管有些试验6084/m9.figshare.5362627,但为了完整起见,包括了所有试验的后处理数据。在每个受试者特定文件夹中,包括扰动(例如,暂停、绊倒和错过过渡),这些扰动在元数据文件中注明。然而,仅报告来自无扰动试验片段的步态事件,并将其用于特征提取。特征数据还包含指定相应腿部阶段(1,右脚跟接触;2,右脚趾离地;3,左脚跟接触;4,左脚趾离地)和四位触发器的列。特征数据的第一行是指定列顺序的标题。同侧是指检测到步态事件的一侧(例如,右脚跟接触和右脚趾离地事件的右腿)。
ENABL3S的总体组成如表1所示。对于每个受试者,在排除过渡到站立或从站立过渡的情况后,每条腿有530 ± 46次足跟着地事件和536 ± 45次足尖离地事件(平均值 ± 标准差)。其他受试者信息以及命名和编号的解释也包含在Figshare上。
6讨论
健全人双侧下肢运动信号百科全书(ENcyclopedia of Able-bodied Bilateral Lower Limb Locomotor Signals)代表了一个双侧下肢神经机械信号的基准,这些信号是从健全人在无辅助运动期间使用可穿戴传感器记录的。引入此数据集的目的并非取代现有的稳态运动生物力学步态分析基准,而是提供一套公开可用的、来自可穿戴传感器的丰富生物力学数据,代表了传统技术和人体活动识别(HAR)方法之间的折衷。ENABL3S包含来自几种不同的与行走相关的活动(包括过渡)的数据,我们期望这些数据有助于理解正常运动的模式,并为可穿戴下肢辅助设备开发新的控制策略。
为了评估该数据集的有效性,我们选择将我们的记录(在腿和所有受试者中取平均值)与先前报告的水平生物力学测量结果进行比较。
表1 | ENcyclopedia of Able-bodied Bilateral Lower Limb Locomotor Signals的特征。
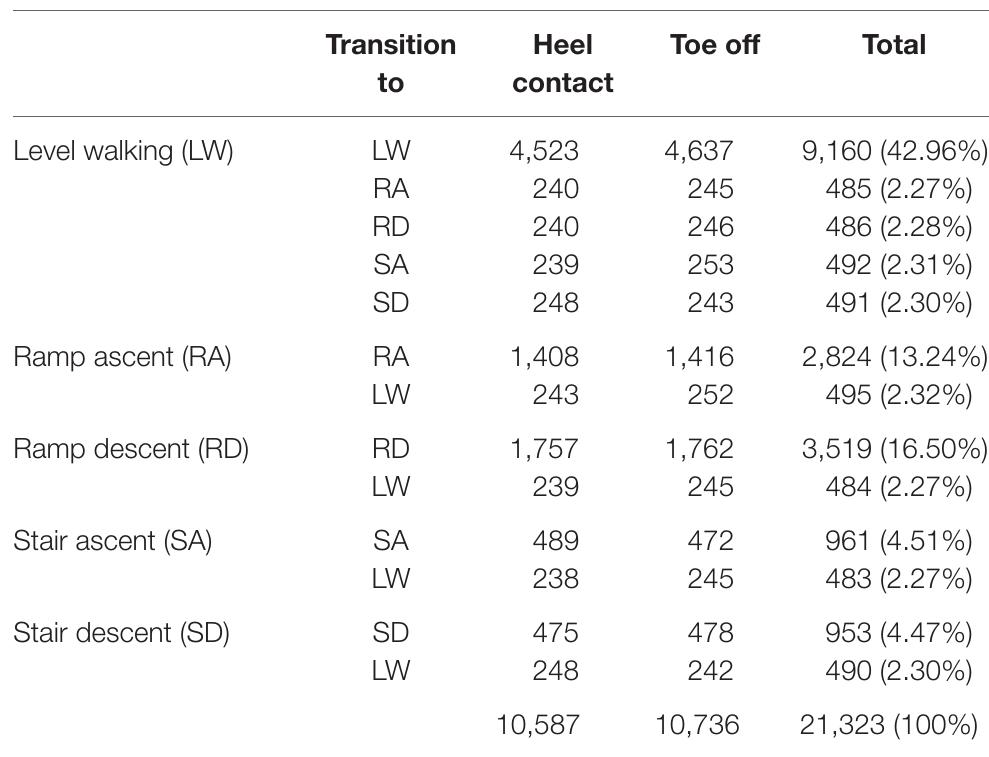
所有受试者的每种运动活动类型的步态事件总数和比例均已汇总。
步行是因为这些数据最容易获取。由于矢状面外的运动以及踝关节测角器的皮肤变形/相对运动,我们对踝关节位置的测量未被认为是生物力学上准确的信号。尽管如此,这些信号对于开发控制策略可能仍然有用,因为许多设备不重现生理运动和/或使用嵌入式关节编码器来感知相对踝关节位置。然而,与先前报道的使用光学运动捕捉记录的数据相比,我们对膝关节位置的测量更为准确(Winter, 1983;McClelland et al., 2011)。ENABL3S 与 Winter (1983) 之间的 RMS 误差在站立相和摆动相分别为 5.9° 和 9.5°。站立相和摆动相的 R2 值分别为 0.73 和 0.94。我们报告的站立相和摆动相期间的膝关节活动范围 (ROM) 值(初始接触时的屈曲:10.9 ± 5.6°;站立相 ROM:6.8 ± 5.2 至 26.9 ± 5.7°;摆动相 ROM:3.4 ± 5.4 至 58.0 ± 6.5°)也与报告的值相当 (McClelland et al., 2011)。位置误差可能归因于行走速度的差异、传感器与旋转轴的轻微不对齐以及皮肤变形/相对运动的组合。膝关节位置也可以通过减去小腿和大腿 IMU 传感器的方向来估计(可能更准确)。踝关节跖屈肌/背屈肌和膝关节屈肌/伸肌的 EMG 激活模式也与先前报道的在自选速度下未辅助的地面行走相似 (Winter, 1983;Sylos-Labini et al., 2014)。所有受试者在所有稳态水平行走步态中,来自 TA、MG、BF 和 VL 的膝关节位置和 EMG 的汇总数据可在 Figshare 上的补充文件中找到。通过确认我们测量的运动学和 EMG 信号的准确性,我们也验证了基于 IMU 的步态分割方法。
尽管这些数据不如光学运动捕捉那样具有高分辨率,但它们在信号分辨率、所代表活动的广度、在线控制方案的可行性以及对现有公开人体运动数据集的贡献之间取得了平衡。这些数据可用于开发新型控制策略,例如意图识别(即,基于运动完成前检测到的信号预测未来状态),更具体地说是研究传感器融合技术和机器学习方法,用于特征提取和分类(例如,深度学习)。这些数据也可以解释为对健全个体在完全无质量且透明(即,完美反向驱动)的设备上行走的一种模拟,并可用于推导控制策略(如意图识别)的设备无关上限。此处报告的原始数据也可用于比较替代控制系统的性能、评估受试者间的变异性,以及将从受损人群或使用辅助设备(例如,膝关节矫形器和踝足假肢)行走的人群收集的基于用户的生物力学信号与未辅助的正常运动进行比较。