机器视觉的车载触摸屏玻璃盖板贴合应用
在工业自动化的浪潮中,机器视觉就像给机器人装上了一双“智慧之眼”,让它们能够像人一样识别、判断和操作。尤其是在消费电子、汽车制造、智能家居等领域,玻璃盖板的应用越来越广泛。从手机屏幕到车载触摸屏,再到智能冰箱的控制面板,玻璃盖板的高精度贴合直接影响了产品的外观和用户体验。但如何让机器人快速、准确地抓取和贴合这些透明或高反光的玻璃盖板呢?这就需要机器视觉系统大显身手了。今天,我们就来聊聊机器视觉在车载触摸屏玻璃盖板贴合中的应用,尤其是结合MasterAlign视觉系统的实战案例,看看它是如何让这一过程变得高效又可靠的。

想象一下,如果让你在一片混乱的工作台上快速找到一块特定的玻璃盖板,你可能会凭借眼睛和经验慢慢翻找。但对机器人来说,这可不是一件容易的事。玻璃盖板常常是透明的或者带有强烈反光,传统的图像处理方法很容易“看走眼”。这时候,大视野粗定位就派上了用场。它的任务是在较大的范围内快速锁定目标盖板的大致位置,引导机器人进行初步抓取。
MasterAlign视觉系统在这方面表现非常出色,它通过高分辨率相机和镜头拍摄大范围的工作区域,再结合先进的算法,即使面对反光或透明材质,也能迅速识别出盖板的轮廓和位置。系统首先会对图像进行预处理,比如增强对比度、抑制反光干扰,然后通过特征匹配或轮廓提取的方式,在毫秒级时间内计算出盖板的坐标和角度。这样一来,机器人就能快速移动过去,完成粗抓取。这个过程不仅速度快,还大大降低了漏抓或误抓的风险,为后续的精细操作打下了坚实基础。
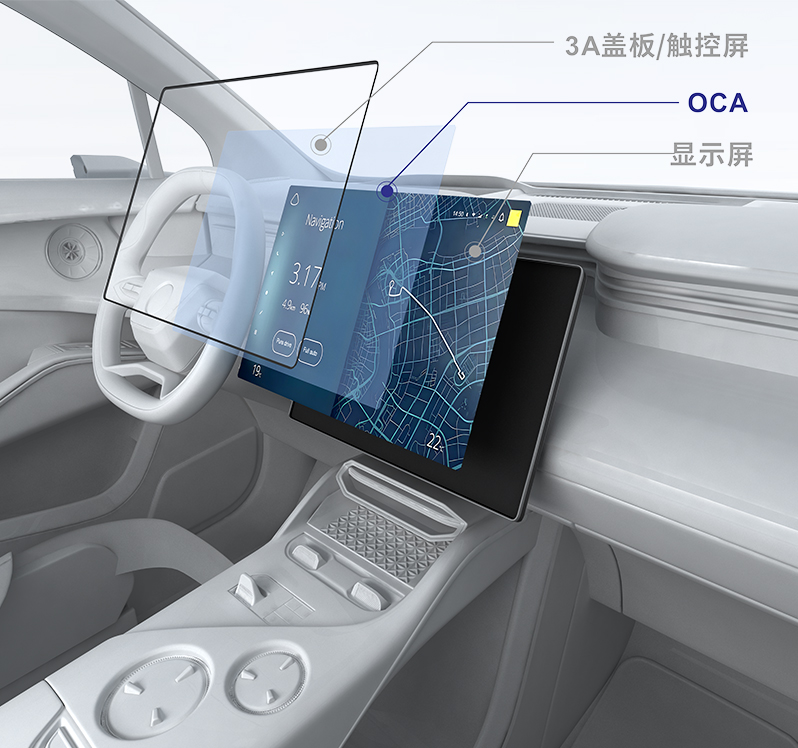
粗抓取只是第一步,就像用钳子夹起一块玻璃,但要想严丝合缝地贴合到产品上,还得靠精定位来帮忙。精定位引导贴合是整个过程的关键环节,要求微米级的精度和极高的稳定性。玻璃盖板在贴合时,往往需要与底部的边框完美对齐,稍有偏差就可能出现气泡、错位,甚至损坏产品。MasterAlign视觉系统在这里发挥了核心作用,它采用高分辨率工业相机,通过像素级的图像分析,精确计算盖板的位置、旋转角度。同时,系统可以实时监测贴合过程中的偏差,通过多相机协作动态调整机器人的动作轨迹,确保盖板以最优的方式贴合。这好比是做一场手术,每一步都精准无误。这种精定位技术将贴合精度提升到了0.02mm以内,让产品良品率大幅提高。

有了强大的视觉功能,但如果操作界面复杂难懂,也会让现场工程师头疼不已。一个好的视觉系统不仅要“聪明”,还要“友好”。MasterAlign视觉系统在设计上就注重了用户体验,提供了简洁易懂的操作界面。即使是非专业人士,也能通过图形化的操作界面快速上手。系统界面通常采用直观的图标和菜单,用户只需点击几下就能完成相机标定、参数设置和流程编辑。它还支持实时预览功能,操作人员可以在屏幕上直接看到视觉处理的效果,比如识别到的盖板轮廓、定位结果和偏差数据,从而及时调整参数,大大降低了培训和维护成本,助力企业快速实现自动化升级。
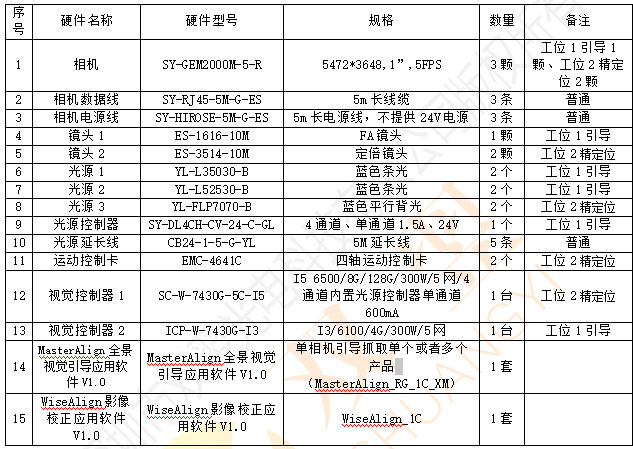
配置清单如下:
总的来说,机器视觉在车载触摸屏贴合中的应用,正是工业自动化走向智能化、精细化的一个缩影。从大视野粗定位的快速抓取,到精定位引导的微米级贴合,再到用户友好的操作界面,MasterAlign视觉系统完美诠释了如何将先进技术与实际需求结合。它不仅提升了生产效率和产品品质,还降低了人力成本,让制造过程更加可靠和灵活。随着人工智能和视觉技术的发展,未来这类应用还会更加强大,比如实现自适应学习和更复杂的缺陷检测。它正静静改变着我们的制造世界,让精准变得简单,让科技服务于人。