6.1 - UART串口数据收发环回实验
文章目录
- 1 实验任务
- 2 系统框图
- 3 软件设计
1 实验任务
本实验任务是使用PS端UART控制器,完成串口中断数据环回的功能。
2 系统框图
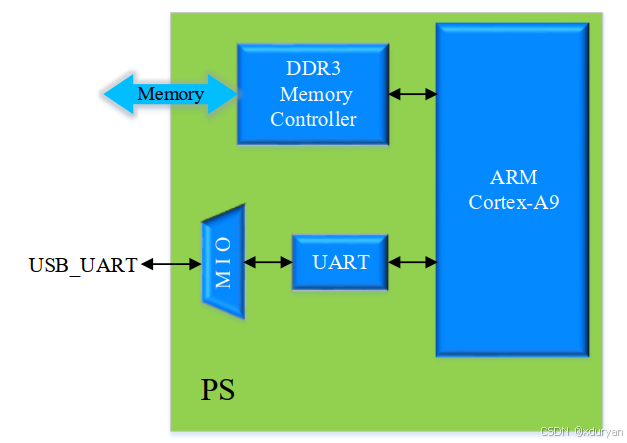
3 软件设计
注意事项:
- 同时使能XUARTPS_IXR_RXOVR 和XUARTPS_IXR_TOUT,以支持不定长数据接收;
- 对于XUartPs_Recv函数
- (1) 禁用所有中断
- (2) 使用XUartPs_ReceiveBuffer函数从RX FIFO中读取数据
- (3) 恢复中断使能
- (4) 返回实际读取的个数;
- 接收超时是个好东西,哈哈哈。
/************************** Include Files ***********************************/
#include "xparameters.h"
#include "xuartps.h"
#include "xscugic.h"
#include "xil_exception.h"
#include "stdio.h"
/************************** Constant Definitions ****************************/
#define UART_DEVICE_ID XPAR_XUARTPS_0_DEVICE_ID
#define INTC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID
#define UART_INTR_ID XPAR_XUARTPS_1_INTR
#define BUFFER_SIZE 64 // 接收缓冲区大小
#define FIFO_TRIGGER_LEVEL 32 // FIFO触发阈值
#define RECV_TIMEOUT 4 // 接收超时时间(单位:波特率时钟周期)
/************************** Function Prototypes *****************************/
s32 UartPsInit(XUartPs *UartPsInstPtr, XUartPsFormat* UartFormatPtr);
s32 SetupInterruptSystem(XScuGic *IntcInstPtr, XUartPs *UartPsInstPtr);
void UartIntrHandler(void *CallBackRef);
/************************** Variable Definitions ****************************/
XUartPs UartInst;
XScuGic IntcInst;
u8 RxBuffer[BUFFER_SIZE] = { 0 }; // 接收缓冲区
int RxDataLength = 0; // 接收到的数据长度
XUartPsFormat UartFormat = {
XUARTPS_DFT_BAUDRATE, // 115200
XUARTPS_FORMAT_8_BITS,
XUARTPS_FORMAT_NO_PARITY,
XUARTPS_FORMAT_1_STOP_BIT
};
/************************** Function Implementation *************************/
int main()
{
//
s32 Status;
// 初始化UART
Status = UartPsInit(&UartInst, &UartFormat);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
// 设置中断系统
Status = SetupInterruptSystem(&IntcInst, &UartInst);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
// 主循环
while(1)
{
;
}
//
return 0;
}
s32 UartPsInit(XUartPs *UartInstPtr, XUartPsFormat* UartFormatPtr)
{
//
s32 Status;
XUartPs_Config *UartConfigPtr;
// 查找UART配置
UartConfigPtr = XUartPs_LookupConfig(UART_DEVICE_ID);
if(NULL == UartConfigPtr)
{
return XST_FAILURE;
}
// 初始化UART
Status = XUartPs_CfgInitialize(UartInstPtr, UartConfigPtr, UartConfigPtr->BaseAddress);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
// 设置UART数据格式
XUartPs_SetDataFormat(UartInstPtr, UartFormatPtr);
// 设置UART操作模式
XUartPs_SetOperMode(UartInstPtr, XUARTPS_OPER_MODE_NORMAL);
// 设置接收FIFO触发阈值
XUartPs_SetFifoThreshold(UartInstPtr, FIFO_TRIGGER_LEVEL);
// 设置接收超时
XUartPs_SetRecvTimeout(UartInstPtr, RECV_TIMEOUT);
// 设置中断掩码,使能FIFO触发中断和接收超时中断
XUartPs_SetInterruptMask(UartInstPtr, XUARTPS_IXR_RXOVR | XUARTPS_IXR_TOUT);
//
return XST_SUCCESS;
}
s32 SetupInterruptSystem(XScuGic *IntcInstPtr, XUartPs *UartInstPtr)
{
//
s32 Status;
XScuGic_Config *IntcConfigPtr;
// 初始化中断控制器GIC
IntcConfigPtr = XScuGic_LookupConfig(INTC_DEVICE_ID);
if (NULL == IntcConfigPtr)
{
return XST_FAILURE;
}
Status = XScuGic_CfgInitialize(IntcInstPtr, IntcConfigPtr, IntcConfigPtr->CpuBaseAddress);
if (Status != XST_SUCCESS)
{
return XST_FAILURE;
}
// 注册异常处理程序
Xil_ExceptionInit();
Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT, (Xil_ExceptionHandler)XScuGic_InterruptHandler, IntcInstPtr);
Xil_ExceptionEnable();
// 连接UART中断处理程序
XScuGic_Connect(IntcInstPtr, UART_INTR_ID, (Xil_InterruptHandler)UartIntrHandler, (void *)UartInstPtr);
// 使能UART中断
XScuGic_Enable(IntcInstPtr, UART_INTR_ID);
//
return XST_SUCCESS;
}
void UartIntrHandler(void *CallBackRef)
{
//
XUartPs* UartInstPtr = (XUartPs*)CallBackRef;
u32 IsrStatus;
// 读取中断状态
IsrStatus = XUartPs_ReadReg(UartInstPtr->Config.BaseAddress, XUARTPS_IMR_OFFSET);
IsrStatus &= XUartPs_ReadReg(UartInstPtr->Config.BaseAddress, XUARTPS_ISR_OFFSET);
// 处理FIFO触发中断
if ((IsrStatus & (u32)XUARTPS_IXR_RXOVR) != (u32)0) {
// 读取FIFO中的数据
RxDataLength = XUartPs_Recv(UartInstPtr, RxBuffer, BUFFER_SIZE);
// 清除中断状态
XUartPs_WriteReg(UartInstPtr->Config.BaseAddress, XUARTPS_ISR_OFFSET, XUARTPS_IXR_RXOVR);
//
printf("Rx Trigger, Receive %u Bytes.\n", RxDataLength);
}
// 处理接收超时中断
if ((IsrStatus & (u32)XUARTPS_IXR_TOUT) != (u32)0) {
// 读取FIFO中剩余的数据
RxDataLength = XUartPs_Recv(UartInstPtr, RxBuffer, BUFFER_SIZE);
// 清除中断状态
XUartPs_WriteReg(UartInstPtr->Config.BaseAddress, XUARTPS_ISR_OFFSET, XUARTPS_IXR_TOUT);
//
printf("Rx Timeout, Receive %u Bytes.\n", RxDataLength);
}
// 如果有数据接收到
if (RxDataLength > 0) {
// 处理接收到的数据
XUartPs_Send(UartInstPtr, RxBuffer, RxDataLength);
//
RxDataLength = 0;
}
//
return;
}