文献阅读笔记【雷达信号分选】:基于机器学习的雷达信号分选方法综述
文献阅读笔记:基于机器学习的雷达信号分选方法综述
- 【文献阅读笔记】基于机器学习的雷达信号分选方法综述
- 一、文献基本信息
- 二、摘要与引言
- 2.1 研究背景
- 2.2 文献核心贡献
- 2.3 全文结构
- 三、背景知识(II. BACKGROUND)
- 3.1 EW接收器与工作流程
- 3.2 雷达波形关键参数
- 表1:Primary Parameters(脉冲描述字PDW的核心组成)
- Secondary Parameters(脉冲间关联属性)
- 3.3 雷达扫描与观测噪声
- 四、RSD问题定义(III. PROBLEM STATEMENT)
- 4.1 脉冲映射的数学描述
- 4.2 场景复杂度评估
- 4.3 RSD性能指标
- 1. 调整兰德指数(ARI)
- 2. V-measure
- 3. 其他指标
- 4.4 RSD算法的常见假设
- 五、RSD挑战与需求(IV. CHALLENGES AND REQUIREMENTS)
- 5.1 多模态参数处理
- 5.2 非传统机器学习问题
- 5.3 数据稀缺问题
- 5.4 可解释性需求
- 5.5 实时处理需求
- 六、RSD方法分类(V. PULSE DEINTERLEAVING TAXONOMY)
- 6.1 类别1:PRI估计方法(传统方法)
- Algorithm 1 递归波形提取
- 代表性方法
- 6.2 类别2:聚类-based方法
- 1. 一步聚类(One-step)
- 2. 两步聚类(Two-step)
- 6.3 类别3:RNN-based方法
- 代表性方法
- 6.4 类别4:CNN-based方法
- 代表性方法
- 6.5 混合方法与对比
- 七、其他分类框架(VI. OTHER FRAMES OF CLASSIFICATION)
- 7.1 输入特征选择
- 7.2 输入数据格式
- 7.3 分选架构模式(DAP)
- 八、结论与展望(VII. CONCLUSION)
- 8.1 核心结论
- 8.2 未来方向
- 九、阅读心得
- 参考文献(原文核心引用)
【文献阅读笔记】基于机器学习的雷达信号分选方法综述
一、文献基本信息
- 标题:An Overview and Classification of Machine Learning Approaches for Radar Signal Deinterleaving
- 作者:Louis Lesieur 等(法国ENSTA、Thales、IMT Atlantique)
- 期刊:IEEE Access(2025年)
- DOI:10.1109/ACCESS.2025.3539589
- 核心定位:首篇系统梳理雷达信号分选(RSD)领域机器学习(ML)方法的综述,提出多维度分类框架并分析关键挑战。
二、摘要与引言
2.1 研究背景
电子战(Electronic Warfare, EW)被动接收器的核心任务是检测和识别雷达辐射源,而雷达信号分选(Radar Signal Deinterleaving, RSD)是关键步骤:将多个辐射源的交织脉冲按所属辐射源(波形)分类,最终通过与已知波形库比对实现辐射源识别。
传统RSD方法(如基于PRI估计)在高环境密度(时间/频谱密度)和复杂波形(PRI捷变、跳频)场景下性能不足,因此ML(尤其是深度学习DL)方法成为研究热点。
2.2 文献核心贡献
- 详细阐述RSD问题的定义、挑战与工程需求;
- 基于“技术类型”提出RSD方法分类法(4大类),并通过欧拉图呈现方法关联;
- 分析RSD方法的关键维度:底层假设、输入参数、架构模式(DAP),尤其强调文献中少提及的“算法假设”。
2.3 全文结构
- 背景(EW接收器、雷达波形参数);
- RSD问题定义(脉冲映射、性能指标、算法假设);
- RSD挑战与需求(多模态、数据稀缺、可解释性等);
- RSD方法分类(PRI估计、聚类、RNN、CNN);
- 其他分类框架(输入特征、数据格式、架构模式);
- 结论与展望。
三、背景知识(II. BACKGROUND)
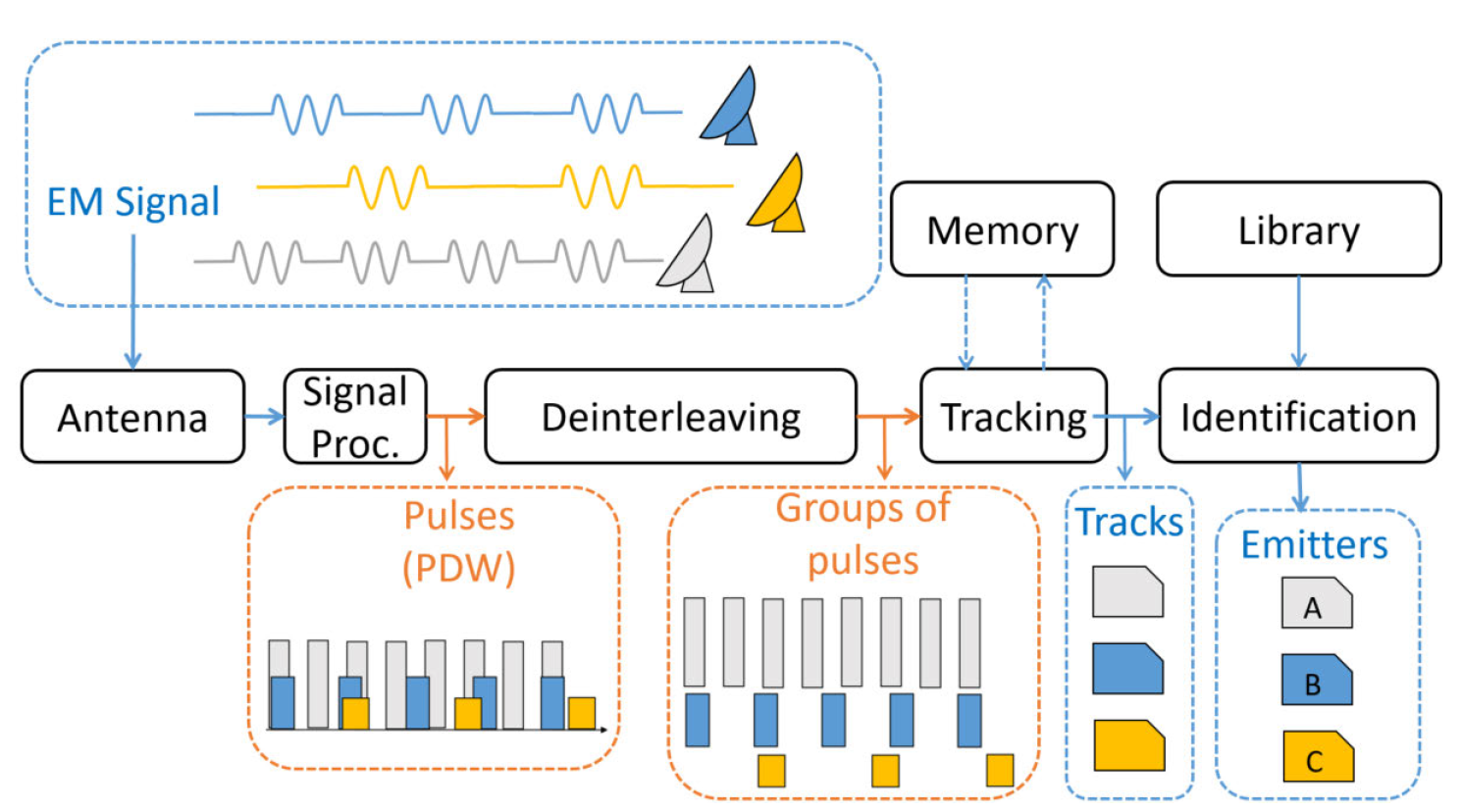
3.1 EW接收器与工作流程
EW接收器是被动系统,核心流程:
天线接收EM信号 → 信号处理提取脉冲(PDW) → 分选(RSD) → 跟踪 → 与波形库比对识别
EW的三大核心活动:
- 电子支援(Electronic Support):监测雷达辐射、预警威胁、表征信号;
- 电子攻击(Electronic Attack):干扰敌方雷达(如电子欺骗);
- 电子防御(Electronic Defense):保护己方雷达(如跳频雷达)。
3.2 雷达波形关键参数
波形(Waveform)是雷达辐射EM波的特征集合,分为primary参数(脉冲固有属性)和secondary参数(脉冲间属性)。
表1:Primary Parameters(脉冲描述字PDW的核心组成)
| 缩写 | 参数名称 | 符号 | 单位 |
|---|---|---|---|
| TOA | 到达时间 | ttt | μs\mu sμs |
| DOA | 到达方向 | θˉ\bar{\theta}θˉ | 度 |
| PA | 脉冲幅度 | aaa | dBm |
| PW | 脉冲宽度 | www | μs\mu sμs |
| RF | 射频(载频) | fff | GHz |
| MOP | 脉冲调制(相位/频率) | - | - |
Secondary Parameters(脉冲间关联属性)
- PRI(Pulse Repetition Interval):连续脉冲发射间隔,分固定PRI、捷变PRI(Jitter,随机波动)、 stagger PRI(周期性切换);
- WPP(Waveform Pattern Period):stagger PRI的周期(多个PRI之和);
- 脉冲间调制:RF跳频、PW捷变等(认知雷达可伪随机改变这些参数以隐藏特征)。
3.3 雷达扫描与观测噪声
- 扫描模式:多数雷达采用圆形扫描,接收端观测到的PA呈sinc函数分布(主瓣功率高,旁瓣可能因衰减不可见);
- 观测噪声:
- 丢失脉冲(大气遮挡、设备关机,发生率约10%);
- 虚假脉冲(反射导致,如经悬崖/船只反射的二次脉冲);
- 测量噪声(TOA/RF等参数的观测误差)。
四、RSD问题定义(III. PROBLEM STATEMENT)
4.1 脉冲映射的数学描述
设观测窗口内有KKK个辐射源,定义:
- X=⋃k=1KX(k)={xi}i≤NX = \bigcup_{k=1}^K X^{(k)} = \{x_i\}_{i \leq N}X=⋃k=1KX(k)={xi}i≤N:所有观测脉冲集合(NNN为总脉冲数);
- X(k)={xi(k)}i≤n(k)X^{(k)} = \{x_i^{(k)}\}_{i \leq n^{(k)}}X(k)={xi(k)}i≤n(k):第kkk个辐射源的脉冲集合(n(k)n^{(k)}n(k)为该辐射源脉冲数);
- xi=(ti,wi,fi,ai,θi)x_i = (t_i, w_i, f_i, a_i, \theta_i)xi=(ti,wi,fi,ai,θi):第iii个脉冲的PDW向量;
- Y=(yi)i≤NY = (y_i)_{i \leq N}Y=(yi)i≤N:标签向量(yi=ky_i = kyi=k表示xix_ixi属于第kkk个辐射源,KKK未知)。
RSD目标:从XXX中划分出所有X(k)X^{(k)}X(k),即估计标签向量YYY并确定KKK。
4.2 场景复杂度评估
场景难度由三要素决定:
- 捷变性(Agility):PRI/RF/PW的脉冲间调制(如高维stagger PRI)导致波形碎片化;
- 重叠(Overlapping):多辐射源的时间/频率重叠(如RF跳频范围重叠);
- 密度(Density):辐射源数量越多,上述问题越严重。
4.3 RSD性能指标
由于RSD本质是无监督聚类(辐射源标签无意义,仅需分区正确),常用指标:
1. 调整兰德指数(ARI)
衡量预测分区Y^\hat{Y}Y^与真实分区YYY的一致性,消除随机因素影响:
ARI=RI−E(RI)max(RI)−E(RI)∈[−1,1]ARI = \frac{RI - E(RI)}{\max(RI) - E(RI)} \in [-1, 1] ARI=max(RI)−E(RI)RI−E(RI)∈[−1,1]
- RIRIRI(Rand Index):正确关联/解离的脉冲对比例;
- E(RI)E(RI)E(RI):随机分区的期望RIRIRI;
- ARI=1ARI=1ARI=1表示完全正确,ARI=0ARI=0ARI=0表示随机。
2. V-measure
基于信息熵的均一性(Homogeneity)和完整性(Completeness)的调和平均:
Vβ=(1+β)⋅h⋅cβ⋅h+c∈[0,1]V_\beta = \frac{(1+\beta) \cdot h \cdot c}{\beta \cdot h + c} \in [0, 1] Vβ=β⋅h+c(1+β)⋅h⋅c∈[0,1]
- hhh:均一性(同一聚类是否仅含同一辐射源脉冲);
- ccc:完整性(同一辐射源脉冲是否全在同一聚类);
- β\betaβ:权重(β=1\beta=1β=1时等价于归一化互信息NMI)。
3. 其他指标
- 纯度(Purity):聚类中占比最高的辐射源脉冲比例;
- 非碎片化(Non-fragmentation):同一辐射源脉冲被分到同一聚类的比例;
- 检测率(Detection Rate):被成功识别的辐射源比例(未检测到的辐射源会导致后续识别失效)。
4.4 RSD算法的常见假设
原文指出4个核心假设(部分算法因假设限制难以应用于实战):
- A1A_1A1:已知辐射源数量KKK(或KKK的上界);
- A2A_2A2:已知辐射源波形特征(实战中未知辐射源无法处理);
- A3A_3A3:不考虑SEI(Specific Emitter Identification,即相同波形的不同辐射源无需区分);
- A4A_4A4:雷达采用机械扫描(PA呈瓣状分布,可利用PA特征辅助分区)。
五、RSD挑战与需求(IV. CHALLENGES AND REQUIREMENTS)
5.1 多模态参数处理
PDW参数类型差异大(时间:TOA/PW;角度:DOA;频率:RF),数值范围悬殊(如PW从几十ns到几ms),直接联合处理需归一化/标准化(如Z-score、Min-Max),否则会导致距离计算失真(如RF以GHz为单位,PW以μs为单位,欧式距离无物理意义)。
5.2 非传统机器学习问题
RSD不同于常规分类/聚类/分割:
- 非分类:类别数KKK未知,无法用softmax输出;
- 非聚类:解唯一(真实分区唯一),且需考虑PRI等脉冲间关联;
- 非分割:时间序列分割是“ regime切换”,而RSD是多辐射源脉冲交织,无明显 regime 边界。
5.3 数据稀缺问题
EW领域数据稀缺的两大原因:
- 标注数据少:实战数据标注困难(需确认脉冲所属辐射源),多依赖仿真(需考虑传播、反射等物理模型);
- 波形保密:军用雷达波形属机密,公开波形库少(如民用导航雷达库[23])。
解决思路:
- 数据增强:GAN生成波形(需确保物理一致性,避免违反雷达原理)、专家知识引导增强;
- 少样本学习(Few-shot Learning):从少量样本中提取特征;
- 半监督学习:仅标注歧义性低的脉冲。
5.4 可解释性需求
EW系统属关键国防装备,需解释决策依据(如“为何该脉冲被归为辐射源A”),但DL方法(RNN/CNN)多为黑箱,需通过XAI技术改进:
- 设计可解释模型:DBSCAN、决策树、符号AI混合模型;
- 后验解释:扰动分析、Shapley值、反事实解释(如“若该脉冲RF增加1GHz,会被归为哪个辐射源”)。
5.5 实时处理需求
嵌入式EW设备(舰载/机载)要求:
- latency < 1秒(威胁预警需快速响应);
- 低内存占用(体积/重量限制)。
解决思路:
- 早期聚类降维(如基于RF/PW预聚类,减少后续处理数据量);
- 神经网络压缩(剪枝、张量分解,减少参数量)。
六、RSD方法分类(V. PULSE DEINTERLEAVING TAXONOMY)
原文将RSD方法分为4大类,核心区别在于技术路线和依赖的特征。
6.1 类别1:PRI估计方法(传统方法)
核心思想:递归提取波形——先估计一个辐射源的PRI,提取对应脉冲,重复至无未标注脉冲(Algorithm 1)。
关键假设:无A1/A2A_1/A_2A1/A2,但依赖TOA/DTOA特征,易受丢失/虚假脉冲影响。
Algorithm 1 递归波形提取
Input: 所有未标注脉冲集合 X
Output: 标签向量 Y(初始化为0)
label = 0
while X 中脉冲数 > 阈值 doI = 选择函数(从 X 中选目标辐射源的脉冲索引)label = label + 1对所有 i ∈ I,设 Y[i] = labelX = X \ {x_i | i ∈ I} # 移除已提取脉冲
end while
代表性方法
-
序列搜索(SS, Sequence Search):
- 原理:随机选两个脉冲,假设其来自同一辐射源,估计PRI = tj−tit_j - t_itj−ti和相位τ=timodPRI\tau = t_i \mod PRIτ=timodPRI;遍历所有脉冲,筛选tkmodPRI≈τt_k \mod PRI \approx \tautkmodPRI≈τ(容忍误差ϵ\epsilonϵ)的脉冲,若数量足够则确认该PRI(Algorithm 2);
- 缺陷:对丢失/虚假脉冲敏感,易误判PRI。
-
差分TOA直方图(DTOAH):
- 原理:计算lll阶DTOA(dtoai(l)=ti+l−tidtoa_i^{(l)} = t_{i+l} - t_idtoai(l)=ti+l−ti),统计直方图;真实PRI对应直方图峰值(同一辐射源的DTOA集中于PRI或其倍数),通过阈值筛选峰值并提取脉冲(Algorithm 3);
- 变种:CDIF(累积多阶DTOA直方图)、SDIF(逐阶验证DTOA直方图);
- 缺陷:捷变PRI会拉平峰值,高丢失率下PRI谐波(如2×PRI)可能成为峰值。
-
变换方法:
- PRI Transform:用TOA自相关替代直方图,减少谐波干扰[33];
- Hough变换:将TOA编码为二进制时间向量,堆叠成矩阵,固定PRI脉冲对应矩阵中的直线,通过Hough变换检测直线[34]。
6.2 类别2:聚类-based方法
核心思想:将RSD视为多维度聚类问题(利用RF/PW/DOA等非时间参数),无需A1/A2A_1/A_2A1/A2,但依赖A3A_3A3(SEI问题未解决)。
1. 一步聚类(One-step)
直接对PDW参数聚类,代表方法:
- DBSCAN:基于密度聚类,需为每个参数调优ϵ\epsilonϵ(邻域半径),如Martin等[42]用PA、PW、MOP参数聚类;
- K-Means + SOFM:Su等[40]用K-Means确定聚类数,SOFM(自组织特征映射)优化聚类中心,适应参数敏捷性;
- 贝塞尔曲线聚类:Digne等[38]对脉冲瞬时频率(IF)拟合贝塞尔曲线,用曲线参数作为DBSCAN输入,解决SEI问题(同一波形的不同辐射源IF曲线不同)。
2. 两步聚类(Two-step)
先预聚类,再合并相似聚类(解决参数敏捷性导致的碎片化),代表方法:
- Hierarchical DBSCAN + AHC:Mottier等[25]第一步用RF/PW预聚类,第二步用TOA的最优传输距离(OTD)计算聚类间距离,通过层次聚类(AHC)合并同一辐射源的碎片化聚类;
- F-ART + DTOAH:Ata’a等[44]第一步用DOA-RF预聚类,第二步用DTOAH分离同一预聚类内的不同辐射源;
- SVM合并:Mu等[45]第一步聚类RF/PRI一致的脉冲,第二步用SVM二分类判断聚类是否来自同一辐射源。
6.3 类别3:RNN-based方法
核心思想:将PDW流视为序列,用LSTM/GRU建模脉冲间关联(尤其PRI模式),多为监督学习(需A1/A2A_1/A_2A1/A2)。
代表性方法
- 并行GRU去噪:Liu等[49]为每个已知波形训练一个GRU去噪器,输入脉冲流,GRU输出“是否为目标波形脉冲”,并行验证所有GRU以实现分选;
- 双向LSTM(BLSTM):Zhu等[51]用BLSTM处理DTOA序列,建模stagger PRI的复杂模式,适用于认知雷达波形;
- 语义分割:Chao等[24]用扩张卷积网络(Dilated CNN)+ BLSTM,先分类PRI调制类型(固定/捷变/stagger),再分类辐射源,输入加入PW/RF提升重叠场景性能。
6.4 类别4:CNN-based方法
核心思想:将PDW编码为2D图像(如TOA-RF平面),用CNN(如U-Net)分割图像,每个像素对应脉冲所属辐射源。
代表性方法
-
TOA-only编码:
- Nuhoglu等[57]将PRI Transform结果编码为图像,用U-Net分割固定PRI与捷变PRI;
- Mao等[60]将DTOA矩阵编码为图像(元素为DTOA出现概率),用Sep-RefineNet分割。
-
多参数编码:
- Gasperini等[12]将TOA(时间轴)、RF(频率轴)编码为512×512图像,像素值存储PW/PA,用U-Net分割,支持15个以内未知辐射源(弱A1A_1A1);
- Kang等[61]将时频图 flatten 为频率向量,输入U-Net,利用细粒度时频特征区分重叠波形。
6.5 混合方法与对比
| 方法类别 | 核心特征 | 优点 | 缺点 | 依赖假设 |
|---|---|---|---|---|
| PRI估计 | TOA/DTOA | 可解释、无A1/A2A_1/A_2A1/A2 | 对丢失/虚假脉冲敏感 | 无 |
| 聚类-based | RF/PW/DOA | 无A1/A2A_1/A_2A1/A2、鲁棒性强 | 难处理SEI、参数重叠 | A3A_3A3 |
| RNN-based | 序列(DTOA/PDW) | 处理复杂PRI模式 | 黑箱、需A1/A2A_1/A_2A1/A2、数据依赖 | A1/A2A_1/A_2A1/A2 |
| CNN-based | 2D图像(TOA-RF) | 处理高维特征、并行性好 | 黑箱、需A1/A2A_1/A_2A1/A2、图像稀疏 | A1/A2A_1/A_2A1/A2 |
七、其他分类框架(VI. OTHER FRAMES OF CLASSIFICATION)
7.1 输入特征选择
不同参数的作用与局限性:
| 参数 | 作用 | 局限性 |
|---|---|---|
| TOA/DTOA | 估计PRI的核心 | 单独使用易受干扰 |
| DOA | 辐射源方向固定,易分区 | 短时间窗口内变化小,重叠难区分 |
| PA | 扫描瓣状分布,辅助SEI | 受传播衰减影响大,噪声高 |
| RF/PW | 辐射源固有属性,区分度高 | 捷变性导致碎片化 |
| MOP | 独特签名,解决SEI | 需额外硬件测量IF信号 |
7.2 输入数据格式
- 有序PDW:按TOA排序的PDW序列(RNN/聚类常用);
- 隐式连接:张量编码(如TOA-RF平面图像,CNN常用);
- 显式连接:图结构(如DTOA矩阵、脉冲K近邻图,GNN常用)。
7.3 分选架构模式(DAP)
定义两种基础模块:
- P2P_2P2(二分模块):将脉冲分为“目标辐射源”和“其他”;
- PKP_KPK(任意分区模块):分为KKK个聚类(KKK已知或自适应)。
常见DAP模式:
- R-U(递归唯一):P2P_2P2递归提取(PRI估计方法);
- D-U(直接唯一):PKP_KPK一步分区(聚类、RNN/CNN);
- R-W(递归胜出):并行多个P2P_2P2,选最优提取(如多GRU去噪);
- D-C2(直接两步):串联PKP_KPK(如预聚类+合并,两步聚类)。
八、结论与展望(VII. CONCLUSION)
8.1 核心结论
- ML方法(聚类/RNN/CNN)在高复杂度场景(高密度、复杂波形)下优于传统PRI估计方法,但需解决可解释性和数据稀缺问题;
- 无“最优方法”:PRI估计适用于简单场景,聚类适用于SEI需求,RNN/CNN适用于复杂PRI模式;
- 现有方法缺乏公开基准数据集(EW数据保密),难以定量对比。
8.2 未来方向
- 架构创新:设计新DAP模式(如并行P2P_2P2+聚类融合);
- XAI集成:提升DL方法的可解释性(如反事实解释);
- 联合任务:分选与辐射源识别/跟踪联合优化;
- 认知雷达应对:开发适应伪随机PRI/RF的方法(如强化学习)。
九、阅读心得
- 基础先行:理解PDW参数、PRI调制类型、EW工作流程是掌握RSD的关键;
- 问题本质:RSD的核心矛盾是“未知KKK+多模态+数据稀缺”,方法选择需结合实战需求(如实时性、SEI需求);
- 研究启发:数据增强(物理一致性GAN)和XAI(反事实解释)是ML方法落地EW的关键突破点;
- 不足:原文未涵盖2025年后的最新方法(如Transformer在RSD的应用),需结合后续文献补充。
参考文献(原文核心引用)
[12] S. Gasperini et al., “Signal clustering with class-independent segmentation,” ICASSP 2020.
[23] S. Yang et al., “Deep contrastive clustering for signal deinterleaving,” IEEE Trans. Aerosp. Electron. Syst., 2024.
[25] M. Mottier et al., “Deinterleaving and clustering unknown RADAR pulses,” RadarConf21.
[49] Z.-M. Liu et al., “Classification, denoising, and deinterleaving of pulse streams with recurrent neural networks,” IEEE Trans. Aerosp. Electron. Syst., 2019.
[57] M. A. Nuhoglu et al., “Image segmentation for radar signal deinterleaving using deep learning,” IEEE Trans. Aerosp. Electron. Syst., 2023.