【硬件-笔试面试题-60】硬件/电子工程师,笔试面试题-60,(知识点:CAN总线通信原理)
目录
1、题目
2、解答
一、CAN通信的核心特性
二、CAN通信的硬件组成
1. 核心硬件模块
2. 总线物理层
三、CAN通信的核心原理
1. 位时序:异步通信的“时间基准”
2. 总线仲裁:解决多节点发送冲突
3. 错误检测与处理
四、CAN通信的帧结构(协议核心)
1. 标准数据帧结构(共44~108位)
2. 其他帧类型
五、CAN协议版本:CAN 2.0A/B 与 CAN FD
六、CAN通信的典型应用场景
七、总结
题目汇总版--链接:
【硬件-笔试面试题】硬件/电子工程师,笔试面试题汇总版,持续更新学习,加油!!!-CSDN博客
【硬件-笔试面试题-60】硬件/电子工程师,笔试面试题-60,(知识点:CAN总线通信原理)
1、题目
讲讲CAN总线通信协议
2、解答
CAN(Controller Area Network,控制器局域网)是一种多主从、实时、抗干扰强的串行通信总线,由博世(Bosch)于1986年为汽车电子设计,现广泛应用于工业自动化、智能家居、医疗器械等领域。其核心优势是在复杂电磁环境下实现可靠的数据传输,且支持多节点低成本互联。以下从通信原理、帧结构、硬件组成、协议规范等方面详细讲解:
参考:一文读懂CAN总线协议 (超详细配34张高清图)_can总线协议详解-CSDN博客
一、CAN通信的核心特性
在深入技术细节前,先明确CAN的关键特性,理解其设计初衷:
- 多主通信:无固定“主机”,所有节点(如ECU、传感器、执行器)均可主动发送数据,通过“非破坏性总线仲裁”决定发送优先级,避免冲突。
- 实时性强:仲裁机制确保高优先级数据(如紧急故障信号)优先传输,延迟可低至微秒级,满足实时控制需求(如汽车刹车信号)。
- 抗干扰能力突出:采用差分信号传输(CAN_H与CAN_L两根线),能有效抑制共模干扰(如电机、高压设备产生的电磁噪声),总线最长传输距离达1km(50kbps波特率)。
- 故障容错:支持总线错误检测(位错误、CRC错误等)、自动重发和节点离线保护,某一节点故障不会导致整个总线瘫痪。
- 低成本:仅需两根线(CAN_H/CAN_L)即可实现多节点通信,无需时钟线(异步通信),减少布线复杂度和成本。
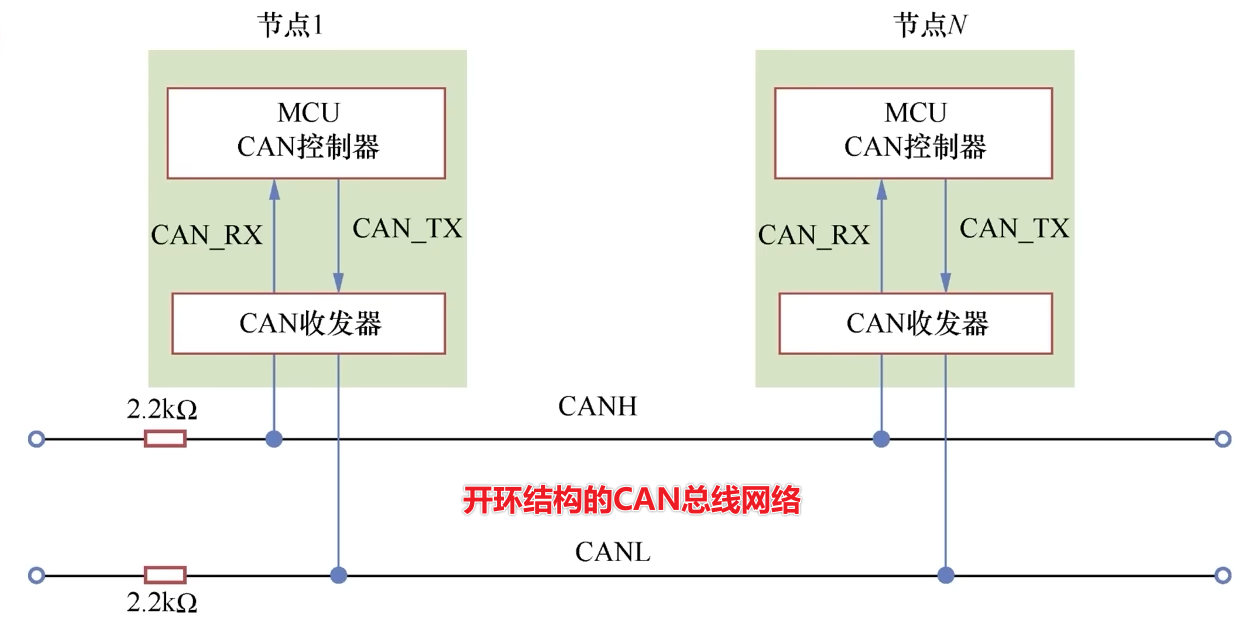
二、CAN通信的硬件组成
CAN总线系统由“节点”和“总线”两部分组成,每个节点的硬件结构基本一致:
1. 核心硬件模块
| 模块名称 | 功能描述 |
| CAN控制器 | 实现CAN协议的核心逻辑:生成/解析帧结构、总线仲裁、错误检测与处理、位时序控制(如TI的SJA1000、STM32内置CAN外设)。 |
| CAN收发器 | 将控制器输出的TTL电平信号转换为总线差分信号(CAN_H/CAN_L),反之将总线差分信号转换为TTL电平给控制器(如NXP的TJA1050、TI的SN65HVD230)。 |
| 微处理器(MCU/DSP) | 控制CAN控制器的工作(如发送/接收数据、配置波特率),处理接收到的数据(如解析传感器信号、生成控制指令)。 |
| 总线终端电阻 | 跨接在CAN_H与CAN_L之间,阻值通常为120Ω,用于匹配总线阻抗,减少信号反射(仅需在总线的两个端点安装,中间节点无需)。 |
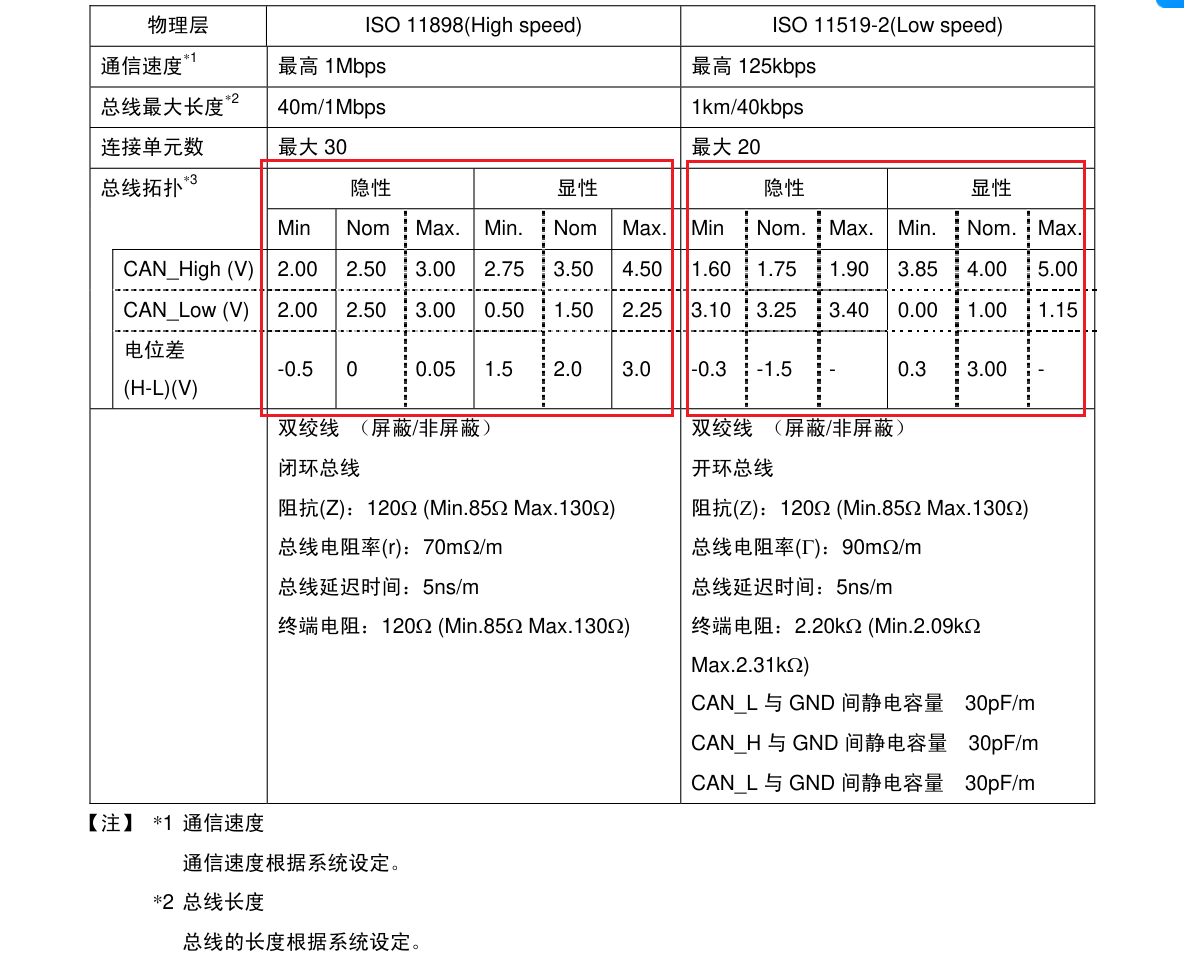
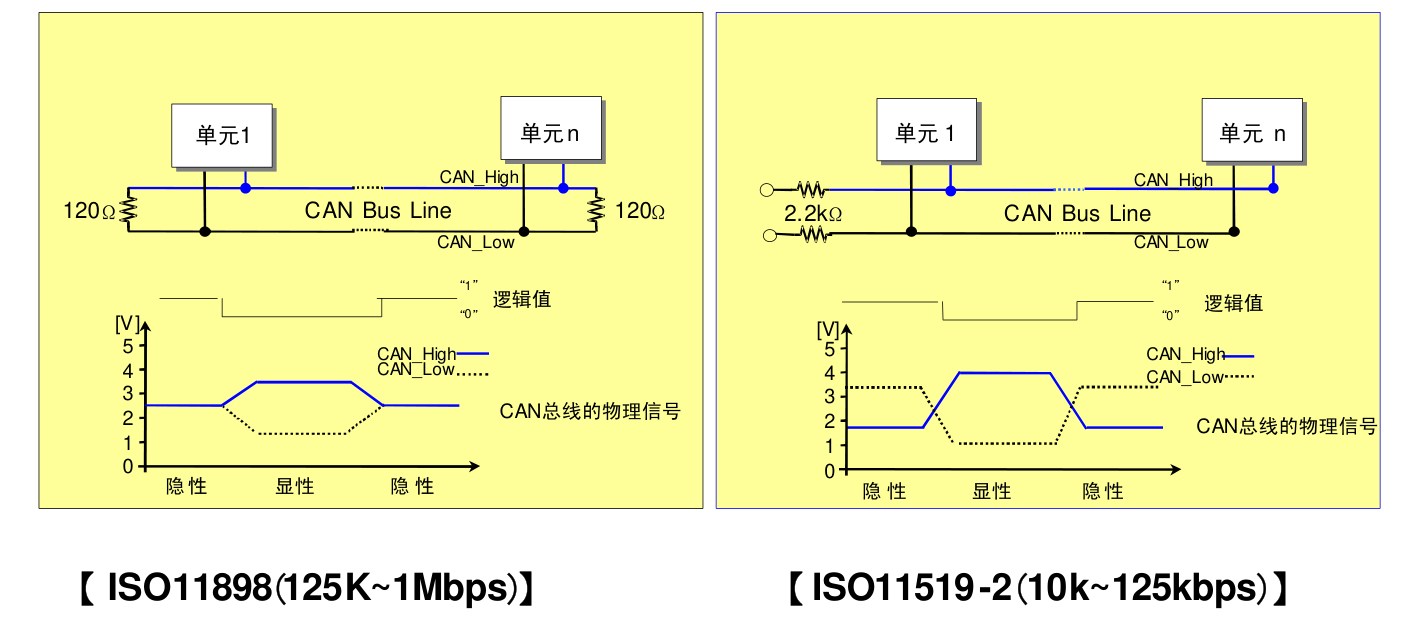
2. 总线物理层
- 总线拓扑:采用“线型拓扑”(总线两端安装120Ω终端电阻),不支持星型、环形拓扑(会导致信号反射和干扰)。
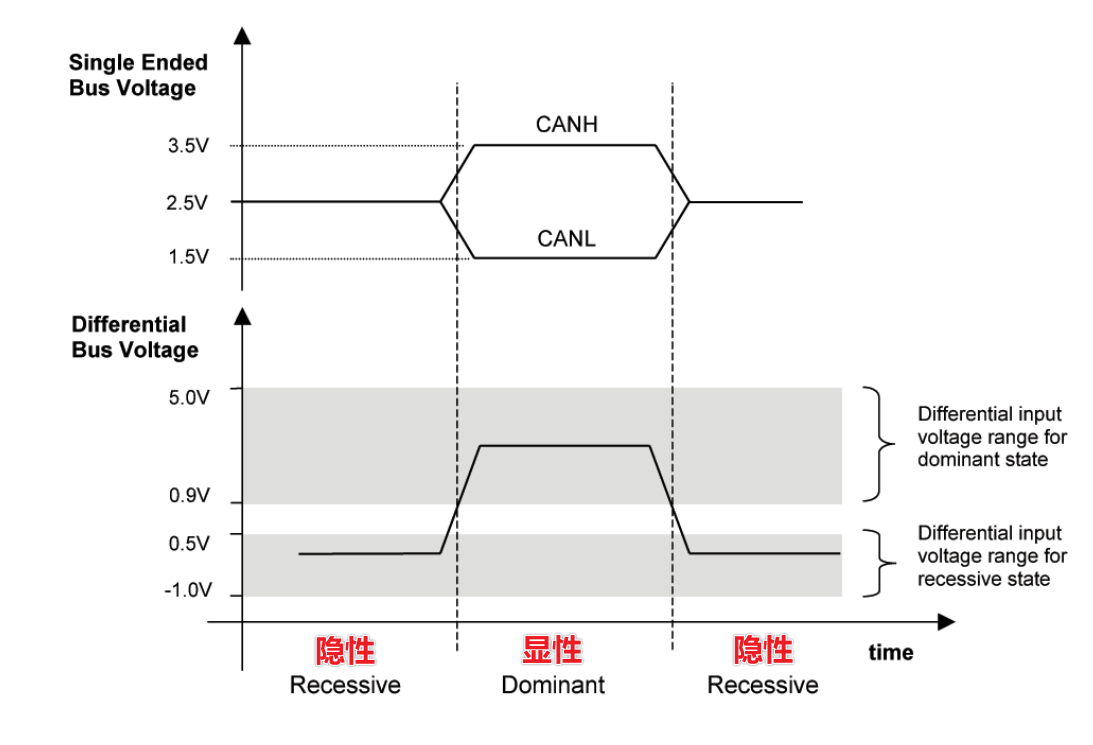
- 信号线:
-
- CAN_H(高电平线):正常通信时电压范围1.7V~3.5V(显性电平为3.5V,隐性电平为1.7V);
- CAN_L(低电平线):正常通信时电压范围0V~1.8V(显性电平为0V,隐性电平为1.8V);
- 差分电压:显性状态下CAN_H - CAN_L ≈ 2V,隐性状态下≈0V(差分信号抗干扰的核心)。
- 节点数量:理论上支持110个节点(受总线电容限制,总电容≤600pF),实际应用中通常不超过30个(避免负载过重)。
三、CAN通信的核心原理
1. 位时序:异步通信的“时间基准”
CAN是异步通信(无时钟线),所有节点需通过“位时序”同步时钟,确保数据采样准确。每个数据位的时序被划分为4个段,由最小时间单位Time Quantum(Tq)构成(1Tq = 1/(波特率×位时间内Tq数)):
| 时序段名称 | 功能描述 |
| 同步段(SS) | 1Tq,用于同步:检测总线电平跳变(隐性→显性),对齐所有节点的位时钟。 |
| 传播段(PTS) | 2~8Tq,补偿总线信号的传输延迟(距离越远,PTS需越长)。 |
| 相位缓冲段1(PBS1) | 1~8Tq,用于调整采样点位置,可通过重新同步延长。 |
| 相位缓冲段2(PBS2) | 1~8Tq,用于调整采样点位置,可通过重新同步缩短。 |
- 采样点:位于PBS1与PBS2之间,是节点读取总线电平的时刻(通常在 bit 时间的60%~80%处,确保信号稳定后采样)。
- 波特率:常见波特率为10kbps~1Mbps(高速CAN),波特率越高,传输距离越短(如1Mbps时最大距离为40m,50kbps时为1km)。
2. 总线仲裁:解决多节点发送冲突
当多个节点同时发送数据时,CAN通过“非破坏性仲裁”决定优先级,高优先级数据优先传输,且不会破坏低优先级数据(冲突后低优先级节点主动退出发送):
- 仲裁原理:基于“显性电平(0)优先于隐性电平(1)”。每个节点在发送数据时,同时监测总线电平:
-
- 若节点发送“隐性电平(1)”,但监测到总线为“显性电平(0)”,说明有更高优先级节点在发送,立即停止发送,转为接收状态;
- 若节点发送的电平与总线电平一致,继续发送下一位,直至所有位发送完成(无冲突)。
- 优先级决定:数据帧的“标识符(ID)”决定优先级——ID的二进制数值越小,优先级越高(如ID=0x000优先级最高,ID=0x7FF优先级最低)。
3. 错误检测与处理
CAN协议定义了5种错误类型,确保数据传输的可靠性:
| 错误类型 | 检测机制 | 处理方式 |
| 位错误 | 节点发送的位电平与监测到的总线电平不一致(除仲裁段和ACK段的隐性位外)。 | 发送“错误帧”,通知所有节点,并重发当前帧(最多重发8次,失败则离线)。 |
| 填充错误 | 违反“位填充规则”(连续5个相同电平后必须插入1个相反电平,用于同步)。 | 发送错误帧,重发数据。 |
| CRC错误 | 接收节点计算的CRC校验值与帧中携带的CRC值不一致。 | 发送“否定应答(NACK)”,要求发送节点重发。 |
| 形式错误 | 帧结构不符合规范(如帧起始、帧结束、ACK段格式错误)。 | 发送错误帧,重发数据。 |
| 应答错误 | 发送节点未收到接收节点的ACK信号(ACK段无显性电平)。 | 发送错误帧,重发数据。 |
- 节点状态:错误累积到一定程度后,节点会进入“总线关闭”状态(离线),避免持续发送错误信号干扰总线。
四、CAN通信的帧结构(协议核心)
CAN协议定义了多种帧类型,其中数据帧(用于传输数据)和远程帧(用于请求数据)是最常用的两种,以下以“标准数据帧”(11位ID)为例讲解:
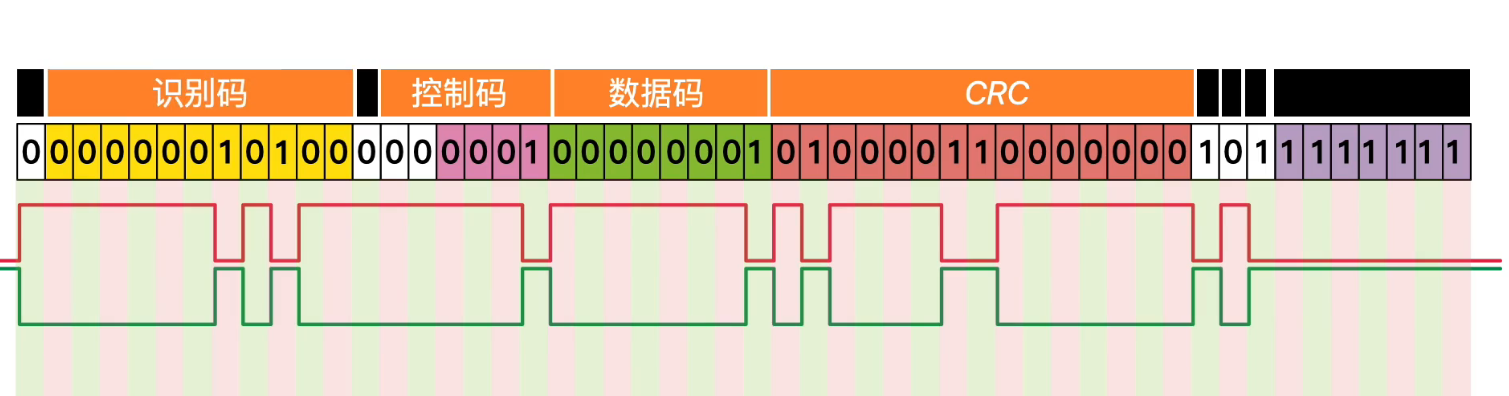
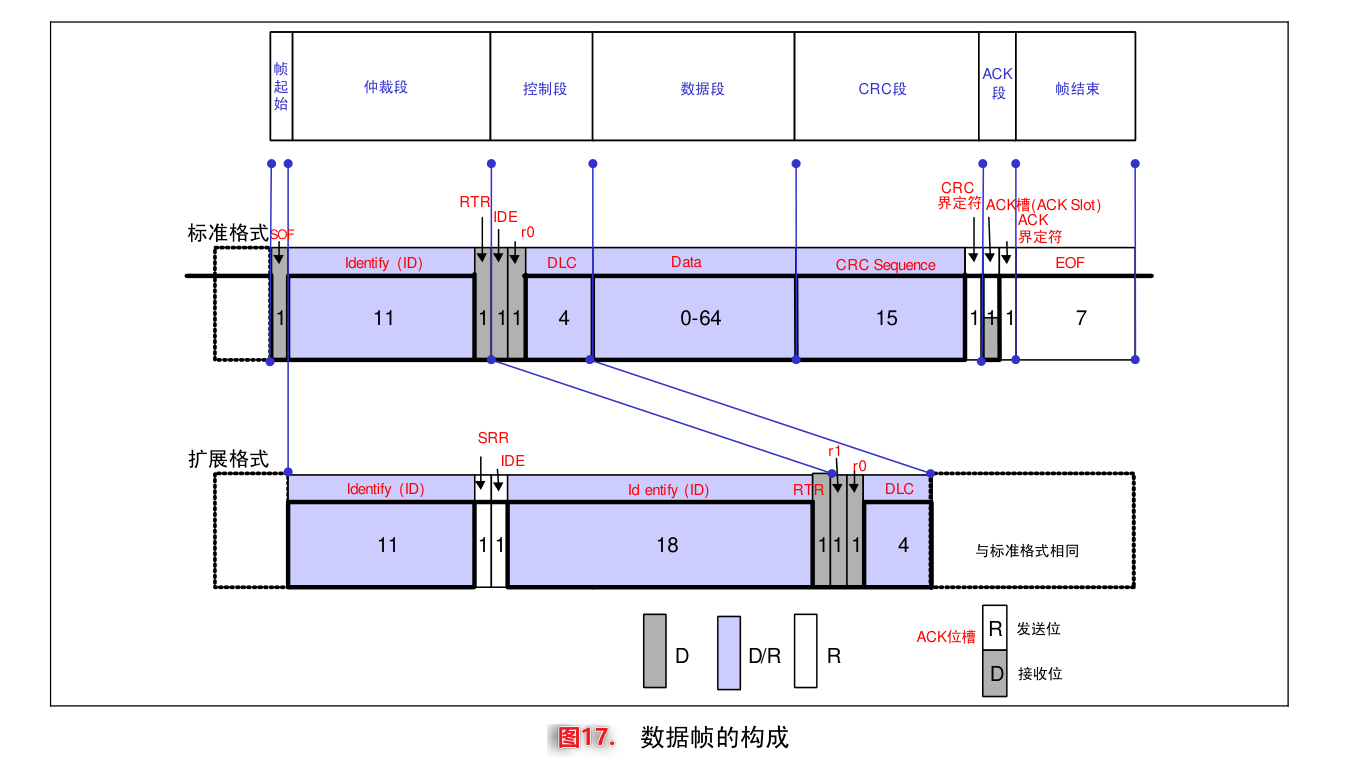
1. 标准数据帧结构(共44~108位)
| 字段名称 | 位数 | 功能描述 |
| 帧起始(SOF) | 1 | 显性电平(0),标志数据帧开始,用于同步所有节点。 |
| 仲裁段(ID+RTR) | 12 | - 11位标识符(ID):决定发送优先级,ID越小优先级越高; |
| 控制段(IDE+R0+DLC) | 6 | - IDE位:0=标准帧(11位ID),1=扩展帧(29位ID); |
| 数据段 | 0~64 | 实际传输的数据(CAN 2.0A/B最大8字节,CAN FD最大64字节),字节数由DLC决定。 |
| CRC段 | 16 | CRC校验码(循环冗余校验),用于检测数据传输错误(接收节点计算CRC并与该字段对比)。 |
| ACK段 | 2 | - ACK位:发送节点发送隐性电平(1),接收节点收到正确数据后发送显性电平(0)表示“应答”; |
| 帧结束(EOF) | 7 | 隐性电平(1),标志数据帧结束。 |
| 间隙(IFS) | 3 | 隐性电平(1),帧之间的间隔,用于节点准备下一次发送。 |
2. 其他帧类型
- 远程帧:用于“请求数据”,与数据帧的区别是RTR位=1,且无数据段。例如:节点A发送远程帧(ID=0x001),节点B(ID=0x001的拥有者)收到后,发送对应的数据帧响应。
- 错误帧:当节点检测到错误时发送,由“错误标志”和“错误界定符”组成,通知所有节点当前总线存在错误。
- 过载帧:节点因负载过重(如接收缓冲区满)无法接收数据时发送,请求发送节点暂停发送,待节点就绪后恢复。
五、CAN协议版本:CAN 2.0A/B 与 CAN FD
随着应用需求升级,CAN协议衍生出不同版本,核心差异在于数据长度和传输速率:
| 协议版本 | 标识符长度 | 数据段最大长度 | 最大波特率 | 核心特点 |
| CAN 2.0A | 11位 | 8字节 | 1Mbps | 基础版本,又称“标准CAN”,支持11位ID(最多2¹¹=2048个节点)。 |
| CAN 2.0B | 11位/29位 | 8字节 | 1Mbps | 扩展版本,支持29位ID(最多2²⁹≈5.3亿个节点),兼容CAN 2.0A。 |
| CAN FD | 11位/29位 | 64字节 | 8Mbps | “Flexible Data Rate”,解决CAN 2.0的带宽瓶颈:数据段扩展至64字节,波特率提升至8Mbps(数据段采用高速,仲裁段仍为1Mbps,兼容传统CAN节点)。 |
六、CAN通信的典型应用场景
- 汽车电子:最核心的应用领域,用于连接发动机ECU、变速箱控制器、ABS系统、仪表盘、传感器等,实现实时数据交互(如车速、转速、刹车信号)。
- 工业自动化:连接PLC、变频器、伺服电机、传感器(温度、压力),构建工业控制网络(如CANopen协议基于CAN开发,用于伺服控制)。
- 智能家居:连接家电(空调、洗衣机)、智能开关、传感器,实现设备间联动(如通过CAN传输温湿度数据,控制空调启停)。
- 医疗器械:如手术机器人、监护仪,需高可靠性和实时性,CAN的抗干扰和故障容错能力可保障设备稳定运行。
七、总结
CAN通信的核心是“用最简单的硬件实现高可靠、实时的多节点通信”:
- 物理层通过差分信号和终端电阻抗干扰;
- 协议层通过仲裁机制、错误检测和帧结构保障数据传输的优先级和准确性;
- 从CAN 2.0到CAN FD的升级,进一步突破了带宽和数据长度的限制,适应更复杂的应用场景。
理解CAN的关键在于:掌握“位时序同步”“总线仲裁”“帧结构解析”这三个核心技术点,它们是CAN区别于UART、SPI等其他串行通信的本质特征,也是其在工业和汽车领域长期占据主流的原因。
题目汇总--链接:
【硬件-笔试面试题】硬件/电子工程师,笔试面试题汇总版,持续更新学习,加油!!!-CSDN博客