Maya绑定基础: FK 和 IK 介绍和使用
目录
1 FK:角度优先
2 IK:位置优先 + 约束修正
IK操作
Ik控制柄 工具设置
1 FK:角度优先
Forward kinematics 正向运动学:从根关节到末端关节的逐层计算方式
控制逻辑:从根关节 → 末端关节,手动指定关节角度
比如:控制一个机械臂时,你需要手动指定每个关节的角度(如肩膀、肘部、腕部的旋转角度),系统会根据这些角度正向推算出末端执行器(如机械爪)的最终位置和方向
复杂度低
适合:精准控制单个关节的运动轨迹
典型应用:骨骼动画中的基础动作(如走路、挥手)
通过旋转让骨骼达到某种状态
2 IK:位置优先 + 约束修正
Inverse kinematics 逆向运动学:从末端关节反推根关节的计算方式
控制逻辑:从末端关节 → 根关节,直接指定目标位置
比如:你只需要指定手的目标位置(如门把手的位置),系统会反向求解出所有关节应有的角度,使手自动到达目标位置,同时保持关节运动范围和物理约束(如肘部不能反向弯曲)
复杂度高
适合:快速实现末端位置的精准定位
典型应用:角色抓取物体、机械臂路径规划、虚拟现实交互
目标已经定了,所有的旋转来匹配IK控制柄
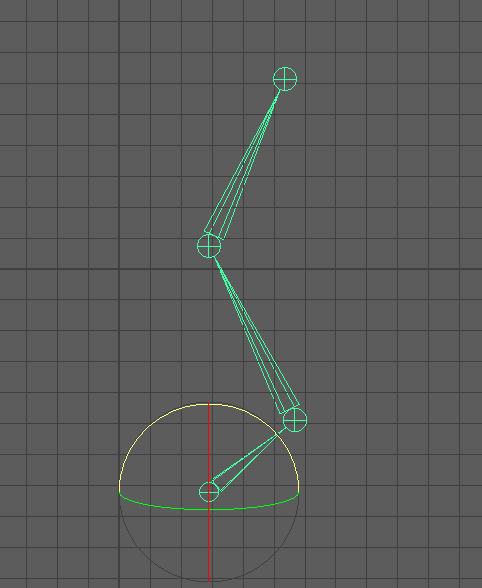
IK操作
菜单栏-- 骨架--创建Ik控制柄
在这两个红色框关节处鼠标单击,即可创建
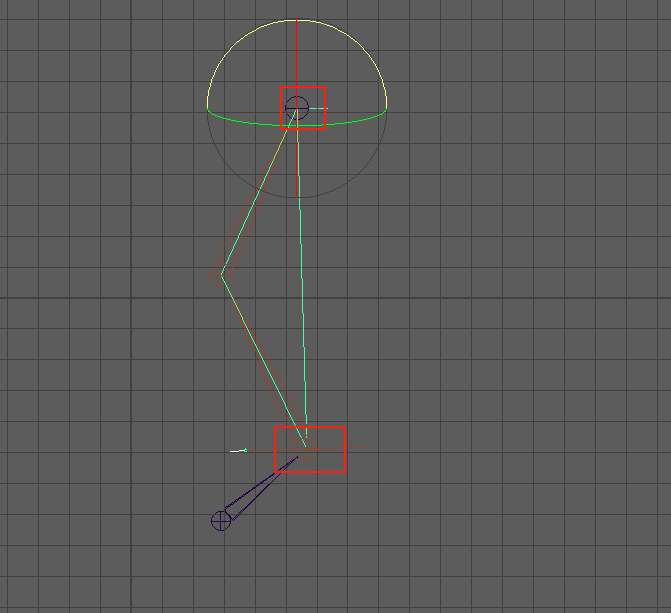
创建好之后,可以通过移动工具 来调节控制这两段关节的相对位置
Ik控制柄 工具设置
骨架--创建Ik控制柄 右面的小方框 工具设置:
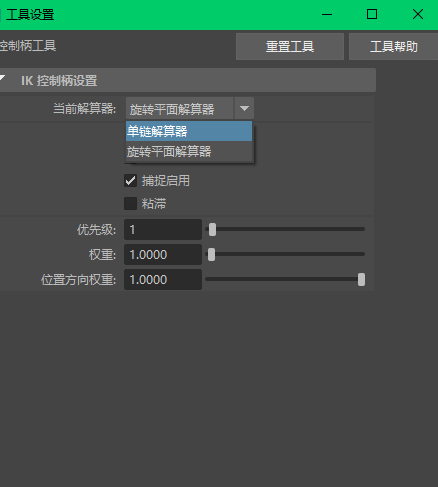
旋转平面解算器:可旋转
单链解算器:不可旋转
点击模型上 IK控制的两个节点,右侧会显示如图
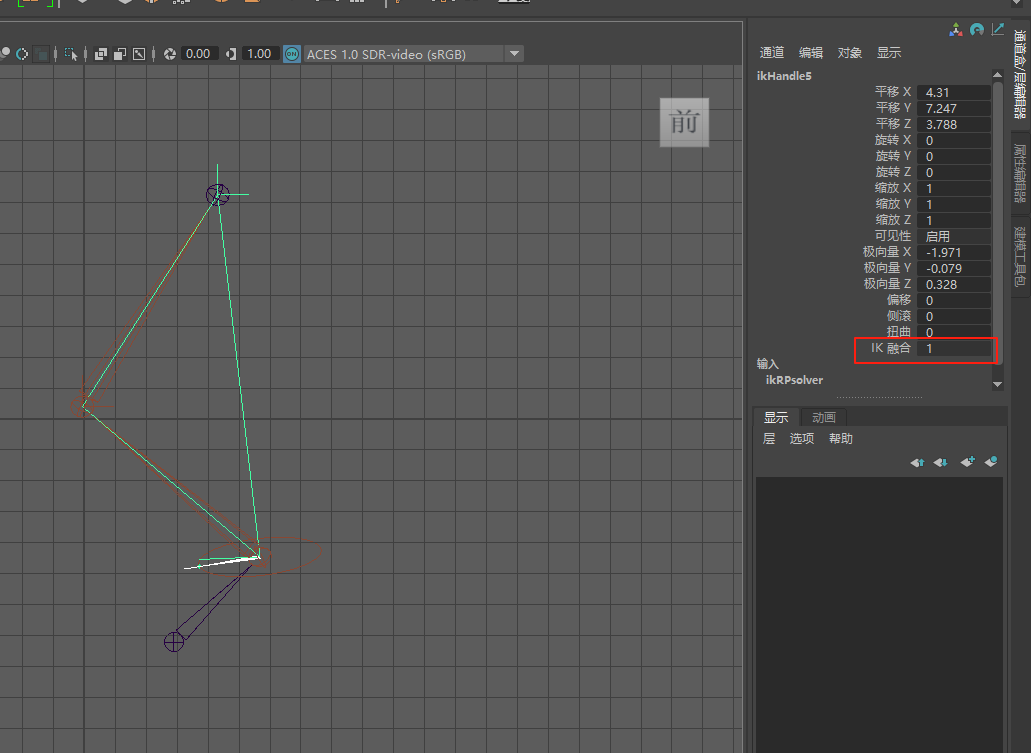
IK融合:就是IK生效的程度,如果是0,就失效了