基于 W55MH32Q-EVB 实现 FatFs 文件系统+FTP 服务器
目录
1 前言
2 项目环境
2.1 硬件准备
2.2 软件环境
3 硬件连接和方案
3.1 W55MH32Q-EVB 硬件连接
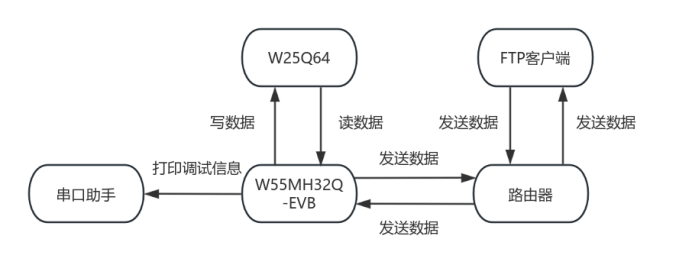
3.2 方案图示
4 例程修改
5.运行结果
6.总结
1 前言
FTP(File Transfer Protocol,文件传输协议)是遵循文件传输协议(FTP),在网络中提供文件传输服务的重要组件。它采用客户端 - 服务器架构,工作模式分为主动和被动。主动模式下,服务器主动发起数据连接;被动模式中,由客户端发起数据连接。用户访问时,需进行身份验证,常见方式是输入用户名和密码,部分服务器也支持匿名登录。
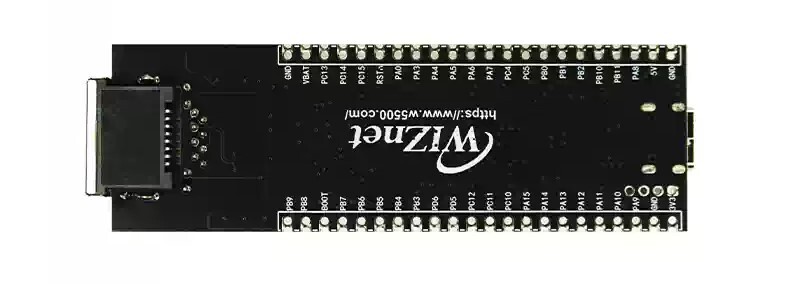
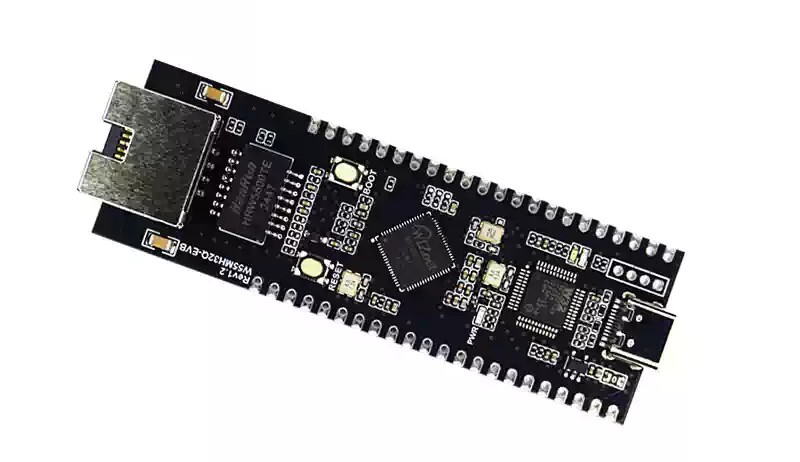
W55MH32Q-EVB 是基于 W55MH32Q芯片开发的一款开发板,主频为 216MHz,1MB 的闪存以及 96KB 的 SRAM,同时还具有一个完整的硬件 TCP/IP 卸载引擎,只需要简单的 socket 编程即可实现以太网应用。 具有以下特点:
- 增强型、真随机数、硬件加密算法单元
- 32 位 Arm® Cortex®-M3 核心的片上
- 1024K 字节闪存的微控制器
- 10/100M 以太网 MAC 和 PHY、集成完整的全硬件 TCP/IP 协议栈引擎
- USB、CAN、17 个定时器
- 3 个 ADC、2 个 DAC、12 个通信接口
产品链接:商品详情
2 项目环境
2.1 硬件准备
- W55MH32Q-EVB 模块
- 杜邦线若干
- 交换机或路由器
- W25Q64 模块
- 一根网线
2.2 软件环境
- 例程链接:https://www.w5500.com/w55mh32.html
- FreeAT_2.2.0.0.exe
- Keil5
- FatFs源码
3 硬件连接和方案
3.1 W55MH32Q-EVB 硬件连接
1.W55MH32Q-EVB_3.3V ---> W25Q64_VCC
2.W55MH32Q-EVB_GND ---> W25Q64_GND
3.W55MH32Q-EVB_PA4 ---> OLED_CS
4.W55MH32Q-EVB_PA5 ---> OLED_SCK
5.W55MH32Q-EVB_PA6 ---> OLED_MISO
6.W55MH32Q-EVB_PA7 ---> OLED_MOSI3.2 方案图示
4 例程修改
本次以 FTP_Server 例程为例。
由于 ftp.c 文件代码较长,修改较多,且分散,所以我上传到了百度网盘,访问链接获取 ftpd.c 文件。
将下载好的文件替换掉例程中的 ftpd.c 文件,并在 ftpd.h 中启用 F_FILESYSTEM 这个宏定义。
创建文件 w25qxx.c,用于驱动 W25Q64,代码如下:
#include "w25qxx.h"
#include "delay.h"u16 W25QXX_TYPE = W25Q128; // The default is W25Q128.// SPIx reads and writes a byte
// TxData: Bytes to write
// Return value: bytes read
u8 SPI_ReadWriteByte(u8 TxData)
{
u8 retry = 0;while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET) // Check whether the specified SPI flag is set or not: Send cache null flag{
retry++;if (retry > 200)return 0;}SPI_I2S_SendData(SPI1, TxData); // Send a data via peripheral SPIx
retry = 0;while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET) // Check whether the specified SPI flag is set or not: Accept cache non-empty flags{
retry++;if (retry > 200)return 0;}return SPI_I2S_ReceiveData(SPI1); // Returns the most recently received data via SPIx
}void SPI_InitTest(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // PORT Aclock enableRCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE); // SPI1 clock enable GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_SetBits(GPIOA, GPIO_Pin_4);W25QXX_CS = 1; // SPI FLASH not selected GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // PA/5/6/7 Multiplexed push-pull output
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); // Initialize GPIOAGPIO_SetBits(GPIOA, GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7); // PA5/6/7 pull up SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; // Set SPI to one-way or two-way data mode: SPI is set to 2 lines full duplex
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; // Set SPI working mode: Set the Master
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; // Set the data size of the SPI: SPI sends and receives 8-bit frame structures
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; // The idle state of the serial synchronous clock is high
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; // The second hop edge (up or down) of the serial synchronization clock is sampled
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; // NSS signals are managed by hardware (NSS pins) or software (using SSI bits): Internal NSS signals are controlled by SSI bits
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; // Define the value of the baud rate prescaler: The baud rate prescaler is 256.
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; // Specify whether the data transfer starts with the MSB bit or the LSB bit: Data transfer starts with the MSB bit
SPI_InitStructure.SPI_CRCPolynomial = 7; // Polynomial for CRC Value CalculationSPI_Init(SPI1, &SPI_InitStructure); // Initializes peripheral SPIx registers according to the parameters specified in the SPI_InitStructSPI_Cmd(SPI1, ENABLE); // enable SPI peripheralsSPI_ReadWriteByte(0xff); // Initiate transfer
}
// SPI speed setting function
// SpeedSet:
// SPI_BaudRatePrescaler_2 2 division
// SPI_BaudRatePrescaler_8 8 division
// SPI_BaudRatePrescaler_16 16 division
// SPI_BaudRatePrescaler_256 256 divisionvoid SPI_SetSpeed(u8 SPI_BaudRatePrescaler)
{assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));SPI1->CR1 &= 0XFFC7;SPI1->CR1 |= SPI_BaudRatePrescaler;SPI_Cmd(SPI1, ENABLE);
}// Read the status register of the W25QXX
// BIT7 6 5 4 3 2 1 0
// SPR RV TB BP2 BP1 BP0 WEL BUSY
// SPR: default 0, status register protection bit, used with WP
// TB, BP2, BP1, BP0: FLASH regional write protection settings
// WEL: Write enable lock
// BUSY: busy flag bit (1, busy; 0, idle)
// Default: 0x00
u8 W25QXX_ReadSR(void)
{
u8 byte = 0;W25QXX_CS = 0; // enable deviceSPI_ReadWriteByte(W25X_ReadStatusReg); // Send read status register command
byte = SPI_ReadWriteByte(0Xff); // Read a byteW25QXX_CS = 1; // Cancel selectionreturn byte;
}
// Write the W25QXX status register
// Only SPR, TB, BP2, BP1, BP0 (bit 7, 5, 4, 3, 2) can be written!!!
void W25QXX_Write_SR(u8 sr)
{W25QXX_CS = 0; // enable deviceSPI_ReadWriteByte(W25X_WriteStatusReg); // Send write status register commandSPI_ReadWriteByte(sr); // Write a byteW25QXX_CS = 1; // Cancel selection
}
// W25QXX write enable
// set WEL
void W25QXX_Write_Enable(void)
{W25QXX_CS = 0; // enable deviceSPI_ReadWriteByte(W25X_WriteEnable); // Send write enableW25QXX_CS = 1; // Cancel selection
}
// W25QXX write disabled
// Clear WEL
void W25QXX_Write_Disable(void)
{W25QXX_CS = 0; // enable deviceSPI_ReadWriteByte(W25X_WriteDisable); // Send write ban commandW25QXX_CS = 1; // Cancel selection
}
// Read the chip ID
// The return value is as follows:
// 0XEF13, indicating that the chip model is W25Q80.
// 0XEF14, indicating that the chip model is W25Q16.
// 0XEF15, indicating that the chip model is W25Q32
// 0XEF16, indicating that the chip model is W25Q64.
// 0XEF17, indicating that the chip model is W25Q128
u16 W25QXX_ReadID(void)
{
u16 Temp = 0;W25QXX_CS = 0;SPI_ReadWriteByte(0x90); // Send Read ID commandSPI_ReadWriteByte(0x00);SPI_ReadWriteByte(0x00);SPI_ReadWriteByte(0x00);
Temp |= SPI_ReadWriteByte(0xFF) << 8;
Temp |= SPI_ReadWriteByte(0xFF);W25QXX_CS = 1;return Temp;
}
// read SPI FLASH
// Start reading data of the specified length at the specified address
// pBuffer: data store
// ReadAddr: Address to start reading (24bit)
// NumByteToRead: The number of bytes to read (max. 65535)
void W25QXX_Read(u8 *pBuffer, u32 ReadAddr, u16 NumByteToRead)
{
u16 i;W25QXX_CS = 0; // enable deviceSPI_ReadWriteByte(W25X_ReadData); // Send read commandSPI_ReadWriteByte((u8)((ReadAddr) >> 16)); // Send 24bit addressSPI_ReadWriteByte((u8)((ReadAddr) >> 8));SPI_ReadWriteByte((u8)ReadAddr);for (i = 0; i < NumByteToRead; i++){
pBuffer[i] = SPI_ReadWriteByte(0XFF); // cyclic reading}W25QXX_CS = 1;
}
// SPI writes less than 256 bytes of data in one page (0~ 65535)
// Start writing data up to 256 bytes at the specified address
// pBuffer: data store
// WriteAddr: Address to start writing (24bit)
// NumByteToWrite: The number of bytes to write (max 256), which should not exceed the number of bytes remaining on the page!!!
void W25QXX_Write_Page(u8 *pBuffer, u32 WriteAddr, u16 NumByteToWrite)
{
u16 i;W25QXX_Write_Enable(); // SET WELW25QXX_CS = 0; // enable deviceSPI_ReadWriteByte(W25X_PageProgram); // Send page write commandSPI_ReadWriteByte((u8)((WriteAddr) >> 16)); // Send 24bit addressSPI_ReadWriteByte((u8)((WriteAddr) >> 8));SPI_ReadWriteByte((u8)WriteAddr);for (i = 0; i < NumByteToWrite; i++)SPI_ReadWriteByte(pBuffer[i]); // write loopW25QXX_CS = 1; // Cancel selectionW25QXX_Wait_Busy(); // Wait for write to finish
}
// Write SPI FLASH without test
// You must ensure that all data within the written address range is 0XFF, otherwise data written at non-0XFF will fail!
// with automatic page feed function
// Start writing data of the specified length at the specified address, but make sure the address does not exceed the limit!
// pBuffer: data store
// WriteAddr: Address to start writing (24bit)
// NumByteToWrite: The number of bytes to write (max. 65535)
// CHECK OK
void W25QXX_Write_NoCheck(u8 *pBuffer, u32 WriteAddr, u16 NumByteToWrite)
{
u16 pageremain;
pageremain = 256 - WriteAddr % 256; // The number of bytes remaining on a single pageif (NumByteToWrite <= pageremain)
pageremain = NumByteToWrite; // No more than 256 byteswhile (1){W25QXX_Write_Page(pBuffer, WriteAddr, pageremain);if (NumByteToWrite == pageremain)break; // Write is overelse // NumByteToWrite>pageremain{
pBuffer += pageremain;
WriteAddr += pageremain; NumByteToWrite -= pageremain; // Subtract the number of bytes that have been writtenif (NumByteToWrite > 256)
pageremain = 256; // 256 bytes can be written at a timeelse
pageremain = NumByteToWrite; // Not enough 256 bytes}};
}
// write SPI FLASH
// Start writing data of the specified length at the specified address
// This function has an erase operation!
// pBuffer: data store
// WriteAddr: Address to start writing (24bit)
// NumByteToWrite: The number of bytes to write (max. 65535)
u8 W25QXX_BUFFER[4096];
void SPI_FLASH_BufferWrite(u8 *pBuffer, u32 WriteAddr, u16 NumByteToWrite)
{
u32 secpos;
u16 secoff;
u16 secremain;
u16 i;
u8 *W25QXX_BUF;W25QXX_BUF = W25QXX_BUFFER;
secpos = WriteAddr / 4096; // sector address
secoff = WriteAddr % 4096; // Offset within a sector
secremain = 4096 - secoff; // Sector free space size// printf("ad:%X,nb:%X\r\n",WriteAddr,NumByteToWrite);//for testingif (NumByteToWrite <= secremain)
secremain = NumByteToWrite; // No more than 4096 byteswhile (1){W25QXX_Read(W25QXX_BUF, secpos * 4096, 4096); // Read the content of the entire sectorfor (i = 0; i < secremain; i++) // validation data{if (W25QXX_BUF[secoff + i] != 0XFF)break; // Need to erase}if (i < secremain) // Need to erase{SPI_FLASH_SectorErase(secpos); // Erase this sectorfor (i = 0; i < secremain; i++) // copy{W25QXX_BUF[i + secoff] = pBuffer[i];}W25QXX_Write_NoCheck(W25QXX_BUF, secpos * 4096, 4096); // Write entire sector}elseW25QXX_Write_NoCheck(pBuffer, WriteAddr, secremain); // Write what has been erased, directly write the remaining section of the sector.if (NumByteToWrite == secremain)break; // Write is overelse // Write not finished{
secpos++; // sector address+1
secoff = 0; // The offset position is 0. pBuffer += secremain; // pointer offset
WriteAddr += secremain; // write address offset
NumByteToWrite -= secremain; // Decrementing Bytesif (NumByteToWrite > 4096)
secremain = 4096; // I can't finish writing the next sector.else
secremain = NumByteToWrite; // The next sector can be written}};
}
// Erase the entire chip
// Waiting time is too long...
void W25QXX_Erase_Chip(void)
{W25QXX_Write_Enable(); // SET WELW25QXX_Wait_Busy();W25QXX_CS = 0; // enable deviceSPI_ReadWriteByte(W25X_ChipErase); // Send slice erase commandW25QXX_CS = 1; // Cancel selectionW25QXX_Wait_Busy(); // Wait for chip erase to finish
}
// erase a sector
// Dst_Addr: sector address is set according to actual capacity
// Minimum time to erase a mountain: 150ms
void SPI_FLASH_SectorErase(u32 Dst_Addr)
{// Monitor falsh erasure, testW25QXX_Write_Enable(); // SET WELW25QXX_Wait_Busy();W25QXX_CS = 0; // enable deviceSPI_ReadWriteByte(W25X_SectorErase); // Send sector erase commandSPI_ReadWriteByte((u8)((Dst_Addr) >> 16)); // Send 24bit addressSPI_ReadWriteByte((u8)((Dst_Addr) >> 8));SPI_ReadWriteByte((u8)Dst_Addr);W25QXX_CS = 1; // Cancel selectionW25QXX_Wait_Busy(); // Wait for erase to complete
}
// Enter power-down mode
void W25QXX_Wait_Busy(void)
{while ((W25QXX_ReadSR() & 0x01) == 0x01); // Wait for the BUSY bit to clear
}
// Enter power-down mode
void W25QXX_PowerDown(void)
{W25QXX_CS = 0; // enable deviceSPI_ReadWriteByte(W25X_PowerDown); // Send power down commandW25QXX_CS = 1; // Cancel selectiondelay_us(3); // Waiting for TPD
}
// wake up
void W25QXX_WAKEUP(void)
{W25QXX_CS = 0; // enable deviceSPI_ReadWriteByte(W25X_ReleasePowerDown); // send W25X_PowerDown comand 0xABW25QXX_CS = 1; // Cancel selectiondelay_us(3); // Wait for TRES1
}创建 w25qxx.h 头文件,代码如下:
#ifndef __FLASH_H
#define __FLASH_H
#include "w55mh32.h"// W25X series/Q series chip list
// W25Q80 ID 0XEF13
// W25Q16 ID 0XEF14
// W25Q32 ID 0XEF15
// W25Q64 ID 0XEF16
// W25Q128 ID 0XEF17
#define W25Q80 0XEF13
#define W25Q16 0XEF14
#define W25Q32 0XEF15
#define W25Q64 0XEF16
#define W25Q128 0XEF17extern u16 W25QXX_TYPE; // Define the W25QXX chip model#define W25QXX_CS PAout(4) // W25QXX chip selection signal////////////////////////////////////////////////////////////////////////////
// IO port operation macro definition
#define BITBAND(addr, bitnum) ((addr & 0xF0000000) + 0x2000000 + ((addr & 0xFFFFF) << 5) + (bitnum << 2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
// IO port address mapping
#define GPIOA_ODR_Addr (GPIOA_BASE + 12) // 0x4001080C
#define GPIOB_ODR_Addr (GPIOB_BASE + 12) // 0x40010C0C
#define GPIOC_ODR_Addr (GPIOC_BASE + 12) // 0x4001100C
#define GPIOD_ODR_Addr (GPIOD_BASE + 12) // 0x4001140C
#define GPIOE_ODR_Addr (GPIOE_BASE + 12) // 0x4001180C
#define GPIOF_ODR_Addr (GPIOF_BASE + 12) // 0x40011A0C
#define GPIOG_ODR_Addr (GPIOG_BASE + 12) // 0x40011E0C#define GPIOA_IDR_Addr (GPIOA_BASE + 8) // 0x40010808
#define GPIOB_IDR_Addr (GPIOB_BASE + 8) // 0x40010C08
#define GPIOC_IDR_Addr (GPIOC_BASE + 8) // 0x40011008
#define GPIOD_IDR_Addr (GPIOD_BASE + 8) // 0x40011408
#define GPIOE_IDR_Addr (GPIOE_BASE + 8) // 0x40011808
#define GPIOF_IDR_Addr (GPIOF_BASE + 8) // 0x40011A08
#define GPIOG_IDR_Addr (GPIOG_BASE + 8) // 0x40011E08// IO port operation, only for a single IO port!
// Make sure the value of n is less than 16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr, n) // output
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr, n) // input#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr, n) // output
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr, n) // input#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr, n) // output
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr, n) // input#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr, n) // output
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr, n) // input#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr, n) // output
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr, n) // input#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr, n) // output
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr, n) // input#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr, n) // output
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr, n) // input// instruction list
#define W25X_WriteEnable 0x06
#define W25X_WriteDisable 0x04
#define W25X_ReadStatusReg 0x05
#define W25X_WriteStatusReg 0x01
#define W25X_ReadData 0x03
#define W25X_FastReadData 0x0B
#define W25X_FastReadDual 0x3B
#define W25X_PageProgram 0x02
#define W25X_BlockErase 0xD8
#define W25X_SectorErase 0x20
#define W25X_ChipErase 0xC7
#define W25X_PowerDown 0xB9
#define W25X_ReleasePowerDown 0xAB
#define W25X_DeviceID 0xAB
#define W25X_ManufactDeviceID 0x90
#define W25X_JedecDeviceID 0x9Fvoid SPI_InitTest(void);
u16 W25QXX_ReadID(void); // Read Flash ID
u8 W25QXX_ReadSR(void); // Read status register
void W25QXX_Write_SR(u8 sr); // Write status register
void W25QXX_Write_Enable(void); // write enable
void W25QXX_Write_Disable(void); // write protection
void W25QXX_Write_NoCheck(u8 *pBuffer, u32 WriteAddr, u16 NumByteToWrite);
void W25QXX_Read(u8 *pBuffer, u32 ReadAddr, u16 NumByteToRead); // Read flash
void SPI_FLASH_BufferWrite(u8 *pBuffer, u32 WriteAddr, u16 NumByteToWrite); // Write flash
void W25QXX_Erase_Chip(void); // Whole piece erase
void SPI_FLASH_SectorErase(u32 Dst_Addr); // sector erase
void W25QXX_Wait_Busy(void); // Wait for idle
void W25QXX_PowerDown(void); // Enter power-down mode
void W25QXX_WAKEUP(void); // wake up
#endif修改主函数 main.c,代码如下:
#include "bsp_rcc.h"
#include "bsp_tim.h"
#include "bsp_uart.h"
#include "delay.h"
#include "diskio.h"
#include "ftpd.h"
#include "wiz_interface.h"
#include "wizchip_conf.h"
#include <stdio.h>
#include <stdlib.h>
#include <string.h>#define SOCKET_ID 0
#define ETHERNET_BUF_MAX_SIZE (1024 * 4)/* network information */
wiz_NetInfo default_net_info = {
.mac = {0x00, 0x08, 0xdc, 0x12, 0x22, 0x12},
.ip = {192, 168, 1, 30},
.gw = {192, 168, 1, 1},
.sn = {255, 255, 255, 0},
.dns = {8, 8, 8, 8},
.dhcp = NETINFO_DHCP};FATFS fs; /* FatFs 文件系统对象 */
uint8_t ethernet_buf[ETHERNET_BUF_MAX_SIZE] = {0};void mount_flash(void)
{
FRESULT res_flash; // 在外部 SPI Flash 挂载文件系统,文件系统挂载时会对 SPI 设备初始化
res_flash = f_mount(&fs, "1:", 1);
if (res_flash == FR_NO_FILESYSTEM)
{
printf("FLASH not has a file system yet and to do formatting\r\n");
/* 格式化 */
res_flash = f_mkfs("1:", 0, 0); if (res_flash == FR_OK)
{
printf("FLASH file system has been successfully formatted.\r\n");
/* 格式化后,先取消挂载 */
res_flash = f_mount(NULL, "1:", 1);
if (res_flash != FR_OK)
{
printf("Unmount failed with error: %d\r\n", res_flash);
while (1)
;
}
else
printf("Unremount success\r\n"); /* 重新挂载 */
res_flash = f_mount(&fs, "1:", 1);
if (res_flash != FR_OK)
{
printf("Remount failed with error: %d\r\n", res_flash);
while (1)
;
}
else
printf("Remount success\r\n");
}
else
{
printf("format fail\r\n");
while (1)
;
}
}
else if (res_flash != FR_OK)
{
printf("remount fail,error code:(%d)\r\n", res_flash);
while (1)
;
}
else
{
printf("mount success!\r\n");
} // 更改当前驱动器
res_flash = f_chdrive("1:");
if (res_flash != FR_OK)
{
printf("change fail,error code:%d\r\n", res_flash);
}
}int main(void)
{
wiz_NetInfo net_info;
/* hardware initialization */
rcc_clk_config();
delay_init();
// unsigned char *asd = NULL;
// int qwe = 0; console_usart_init(115200); mount_flash(); tim3_init(); printf("%s FTP Server example\r\n", _WIZCHIP_ID_); /* wiztoe init */
wiz_toe_init(); wiz_phy_link_check(); network_init(ethernet_buf, &default_net_info); wizchip_getnetinfo(&net_info);
ftpd_init(net_info.ip);
while (1)
{
ftpd_run(ethernet_buf);
}5.运行结果
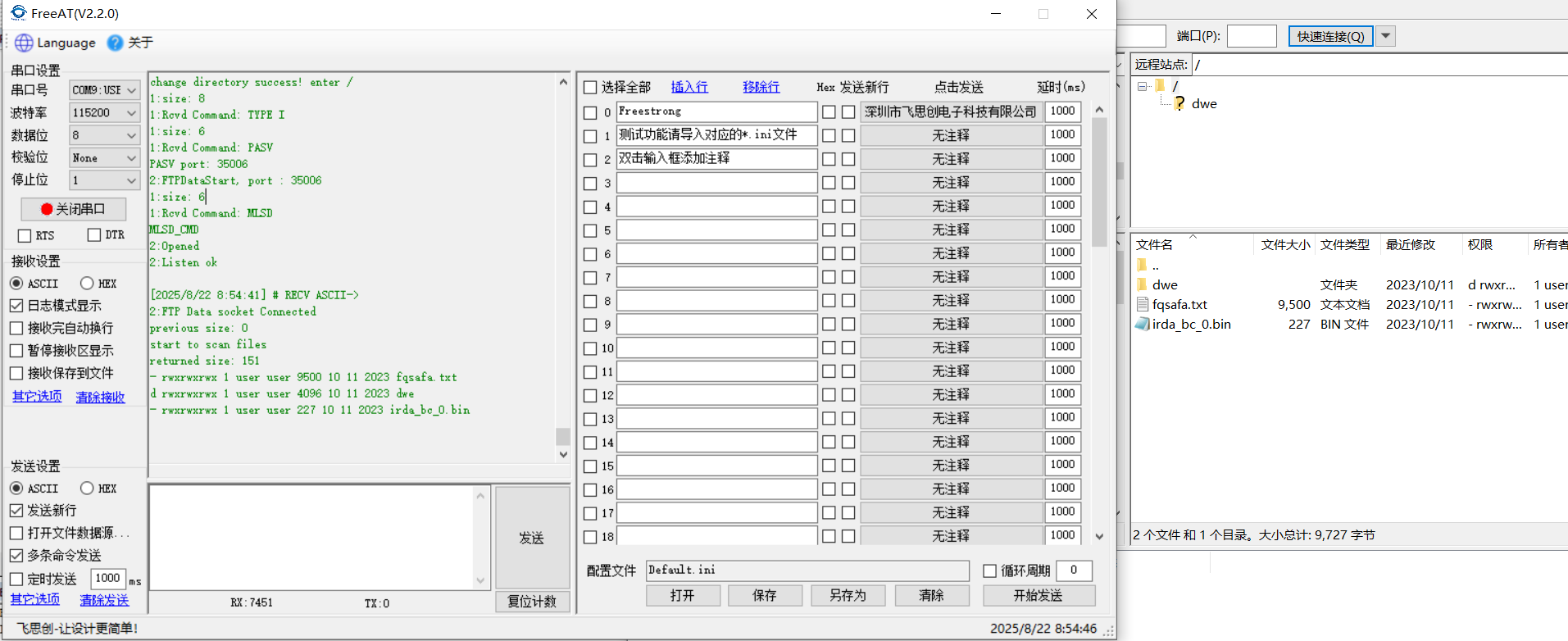
目前的 FatFs 文件系统支持删除,上传服务器文件,也支持删除和上传目录。当前文件系统仅支持英文,如果需要支持中文,需要在 ffconf.h 中修改_CODE_PAGE 宏定义为 936 并使用 cc936.c 文件即可。
由于FatFs不支持访问权限这一功能,所以在代码中预定义了一个宏,将访问权限全部设为可读可写可执行,在客户端这边显示就是rwxrwxrwx。另外,当前不支持修改时间,如果需要,可在设备上电后访问sntp服务器,并启用RTC时钟即可。
客户端使用 filezilla 做测试,访问FileZilla - The free FTP solution下载。
目前我的文件系统有一些文件,当使用 filezilla 访问服务器时,会显示如下文件:
删除目录操作如下:
由于操作较多,其他操作就不演示了。可自行测试。
6.总结
本文详细介绍了如何利用 W55Mh32Q-EVB 实现 FTP 服务器,通过移植 FatFs 文件系统来存储文件,可用于存储日志信息等。感谢大家的耐心阅读!如果您在阅读过程中有任何疑问,或者希望进一步了解这款产品及其应用,欢迎随时通过私信或评论区留言。我们会尽快回复您的消息,为您提供更详细的解答和帮助!