Linux驱动开发笔记(九)——内核定时器
视频:第12.1讲 Linux内核定时器实验-内核时间管理简介_哔哩哔哩_bilibili
文档:《【正点原子】I.MX6U嵌入式Linux驱动开发指南V1.81.pdf》五十章
1. 内核时间管理
《指南》50.1.1节:
Linux内核中有大量的函数需要时间管理,比如周期性的调度程序、延时程序、定时器。硬件定时器提供时钟源,时钟源的频率可以设置, 设置好以后周期性的产生定时中断,系统使用定时中断来计时。中断周期性产生的频率就是系统频率, 也叫做节拍率(tick rate)(有的资料也叫系统频率),比如1000Hz,100Hz等等说的就是系统节拍率。
1.1 设置系统节拍率
编译Linux内核的时候可以通过图形化界面设置系统节拍率:
cd /.../linux/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek
make menuconfig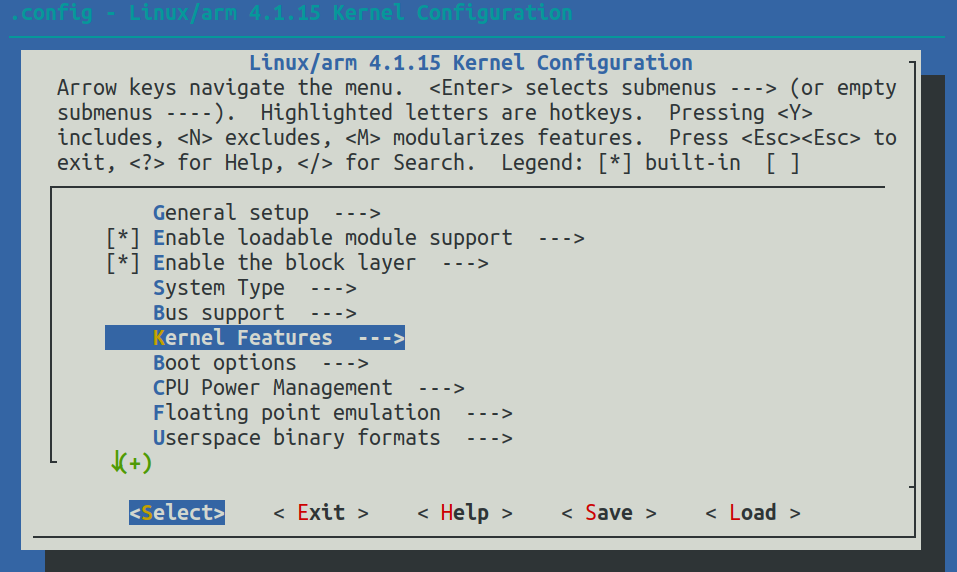
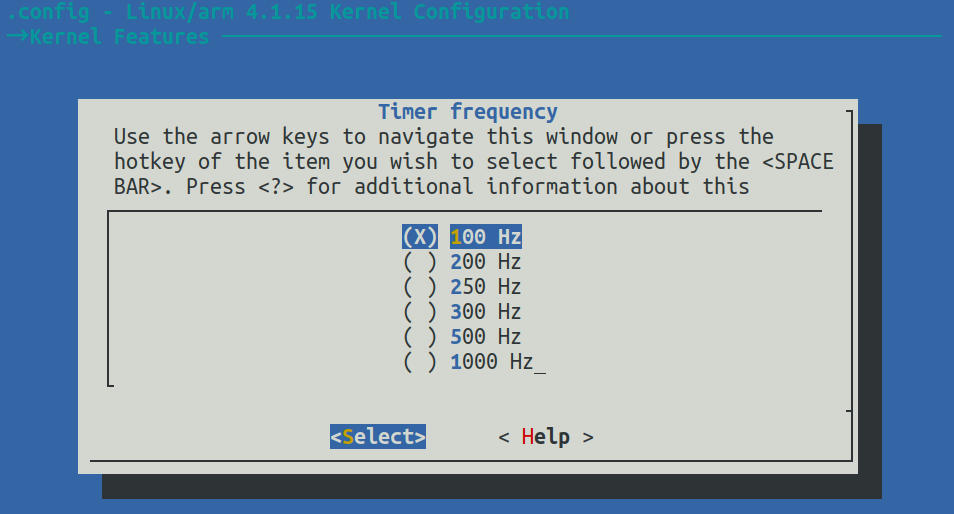
选择kernel features -> Timer frequency,然后便可选择系统街拍率:
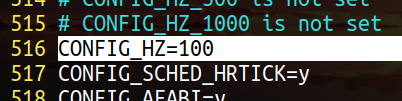
使用命令vi .config去查看:
1.2 系统时间计数器 jiffies
系统会有一个全局变量jiffies记录启动以来的系统节拍数,在系统启动时初始化为0
Linux 内核使用全局变量 jiffies 来记录系统从启动以来的系统节拍数,系统启动的时候会 将jiffies 初始化为0。
为了兼容32位和64位系统,定义了32位和64位两种jiffies,32位jiffies其实就是64位jiffies的低32位:
// 定义在include/linux/jiffies.h
extern u64 __jiffy_data jiffies_64;
extern unsigned long volatile __jiffy_data jiffies; | get_jiffies_64() | 读取jiffies的值。32位和64位系统都可使用 |
如果jiffies达到最大值,就会从零开始计数,称为溢出。若最小HZ=100,则32位的jiffies约497天溢出;最大HZ=1000,则32位的jiffies约49.7天溢出。64位的jiffies有生之年不会溢出。因此对于32位的jiffies,有一个处理溢出的问题。linux提供了相关API函数:
| 函数名 | 返回值 | 功能 |
| time_after(a, b) | (long)(b) - (long)(a) < 0 | 判断a是否在b之后(a > b ?) |
| time_before(a, b) | time_after(b, a) | 判断a是否在b之前(a < b ?) |
| time_after_eq(a, b) | (long)(a) - (long)(b) >= 0) | 判断a是否在b之后或等于b(a ≥ b ?) |
| time_before_eq(a, b) | time_after_eq(b, a) | 判断a是否在b之前或等于b(a ≤ b ?) |
| 一般都将jiffies填到a,要比较的值填到b | ||
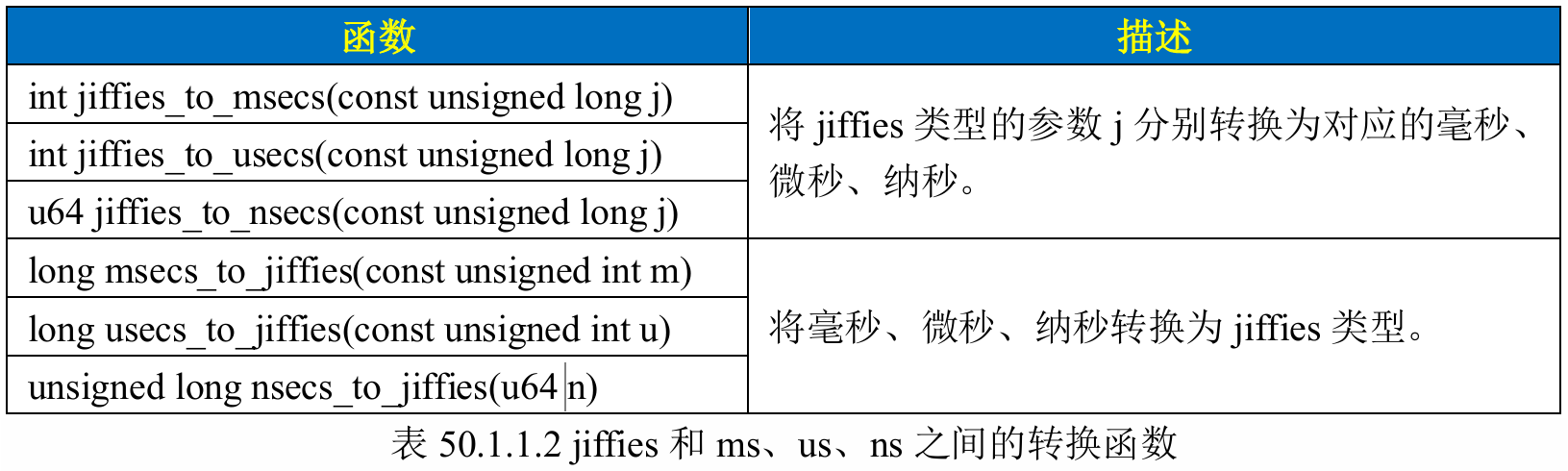
为了方便开发,Linux内核提供了几个jiffies和ms、us、ns之间的转换函数:
示例:
《指南》中的示例,判断是否超时2s以上:
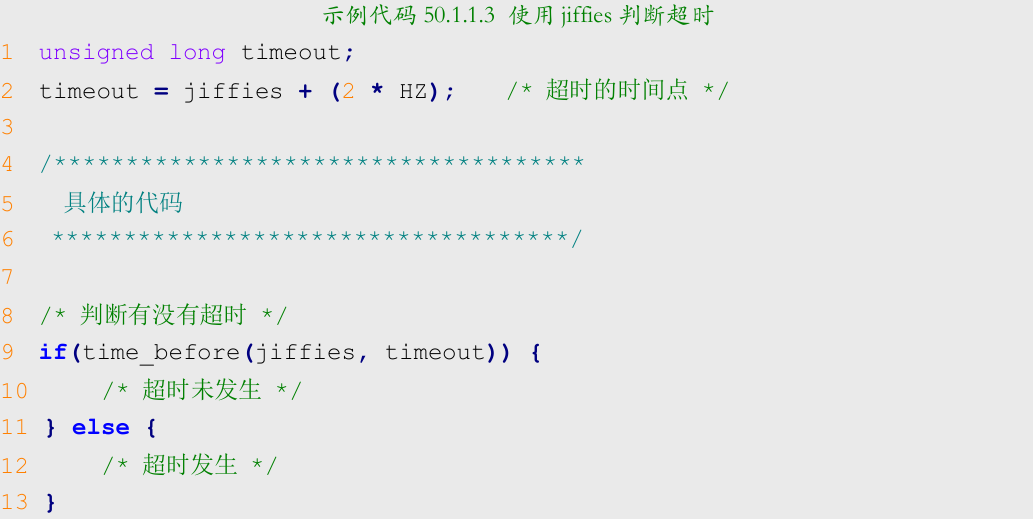
等待1ms:
timeout = jiffies + msecs_to_jiffies(1);while (time_before(jiffies, timeout)) {…………}2. 内核定时器
《指南》50.1.2节:
Linux内核定时器采用系统时钟来实现,并不是硬件定时器。Linux内核定时器使用很简单,只需要提供超时时间(相当于定时值)和定时处理函数即可,当超时时间到了以后设置的定时处理函数就会执行,不需要做一大堆的寄存器初始化工作。
在使用内核定时器的时候要注意一点,内核定时器并不是周期性运行的,超时以后就会自动关闭,因此如果想要实现周期性定时,那么就需要在定时处理函数中重新开启定时器。
timer_list结构体表示内核定时器,定义如下:
// 定义在include/linux/timer.h
struct timer_list {struct list_head entry;unsigned long expires; // 超时时间,单位是节拍数struct tvec_base *base;void (*function)(unsigned long); // 超时处理函数unsigned long data; // 要传递给function函数的参数int slack;
};2.1 内核定时器API函数
2.1.1 init_timer
初始化定时器,但不会启动。
void init_timer(struct timer_list *timer)
// timer: 要初始化的定时器2.1.2 add_timer
向Linux内核注册/启动定时器。注册以后定时器就会开始运行。
必须先init_timer初始化,并配置好定时器结构体里的参数,再注册。
void add_timer(struct timer_list *timer)
//timer:要注册的定时器2.1.3 del_timer
删除一个定时器(不管定时器有没有被激活都可以删除。但是在多处理器系统上,定时器可能会在其他的处理器上运行,因此在调用del_timer之前要先等待其他处理器的定时处理器函数退出)。
int del_timer(struct timer_list * timer)
// timer: 要删除的定时器
// return: 0,定时器还没激活;1,定时器已激活2.1.4 del_timer_sync
也是删除定时器,但是会等待其他处理器使用完该定时器再删除。
del_timer_sync不能在中断服务函数使用。
int del_timer_sync(struct timer_list *timer)
// timer: 要删除的定时器
// return: 0,定时器还没激活;1,定时器已激活2.1.5 mod_timer
修改定时值。
如果定时器还没有激活,那么mod_timer函数会激活定时器。
int mod_timer(struct timer_list *timer, unsigned long expires)
//timer: 要修改的定时器。
//expires:修改后的超时时间
//return: 0,调用mod_timer函数前定时器未被激活;1,调用mod_timer函数前定时器已
被激活。 2.1.6 示例
struct timer_list timer; /* 定义定时器 *//* 定时器回调函数 */
void function(unsigned long arg){/** 定时器处理代码*//* 如果需要定时器周期性运行的话就使用mod_timer重新设置超时值并且启动定时器 */mod_timer (&dev->timertest, jiffies + msecs_to_jiffies (2000));
}/* 初始化函数 */
void init(void){init_timer(&timer); /* 初始化定时器 */timer.function = function; /* 设置定时处理函数 */timer.expires=jffies + msecs_to_jiffies(2000);/* 超时时间2秒 */timer.data = (unsigned long)&dev; /* 将设备结构体作为参数 */add_timer (&timer); /* 注册/启动定时器 */
}/* 退出函数 */
void exit(void){del_timer(&timer); */ 删除定时器 *//* 或者使用del_timer_sync(&timer); */
}2.2 短延时函数

3. 定时器实验
3.1 文件结构
13_TIMER (工作区)
├── .vscode
│ ├── c_cpp_properties.json
│ └── settings.json
├── 13_timer.code-workspace
├── Makefile
└── timer.c3.2 Makefile
CFLAGS_MODULE += -wKERNELDIR := /home/for/linux/imx6ull/linux/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek # 内核路径
# KERNELDIR改成自己的 linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek文件路径(这个文件从正点原子“01、例程源码”中直接搜,cp到虚拟机里面)
CURRENT_PATH := $(shell pwd) # 当前路径
obj-m := timer.o # 编译文件
build: kernel_modules # 编译模块
kernel_modules:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean 3.3 timer.c
主要有以下更新:
增加了 定时器处理函数timer_func()
增加了 设备结构体中 定时器定义
增加了 驱动入口函数中 定时器初始化
增加了 驱动出口函数中 定时器删除
增加了 LED初始化函数led_init()
gpio和pinctrl配置与Linux驱动开发笔记(六)配置一致,这里不再重复(记得设备树注释掉重复的io)
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <linux/io.h>
#include <linux/cdev.h>
#include <linux/kdev_t.h>
#include <linux/stat.h>
#include <linux/device.h>
#include <linux/of_gpio.h>
#include <linux/atomic.h>
#include <linux/timer.h>
#include <linux/jiffies.h>#define DEV_CNT 1
#define DEV_NAME "timer"/* 设备结构体 */
struct timer_dev{dev_t devid;int major;int minor;struct cdev cdev;struct device *device;struct class *class;struct device_node *nd;struct timer_list timer;int led_gpio;
};
struct timer_dev timerdev;/* 定时器处理函数 */
static void timer_func(unsigned long arg){struct timer_dev *dev = (struct timer_dev*)arg;static int state = 1;state = !state;gpio_set_value(dev->led_gpio, state);mod_timer(&dev->timer, jiffies + msecs_to_jiffies(500));
}
/* 初始化LED */
int led_init(struct timer_dev *dev){int ret = 0;/* 1.获取设备节点 */dev->nd = of_find_node_by_path("/gpioled"); // 找到刚才在imx6ull-alientek-emmc.dts根节点下加入的gpioled节点if(dev->nd == NULL){ret = -EINVAL;goto fail_fd;}/* 2.获取LED对应的GPIO */ // 也就是节点中led-gpios那一行内容dev->led_gpio = of_get_named_gpio(dev->nd, "led-gpios", 0);if(dev->led_gpio < 0){ret = -EINVAL;goto fail_gpio;}/* 3.申请IO */ret = gpio_request(dev->led_gpio, "led-gpios");if(ret){ret = -EBUSY;printk("IO %d busy!\r\n",dev->led_gpio);goto fail_request;}/* 4.使用IO,设置为输出 */ret = gpio_direction_output(dev->led_gpio, 1);if(ret < 0){ret = -EINVAL;goto fail_gpioset;}return 0;fail_gpioset:gpio_free(dev->led_gpio);
fail_request:
fail_gpio:
fail_fd:return ret;
}/* 操作集 */
static int key_release(struct inode *inode, struct file *filp){struct key_dev *dev = filp->private_data;return 0;
}
static int key_open(struct inode *inode, struct file *filp){filp->private_data = &timerdev;return 0;
}
static ssize_t key_write(struct file *filp, const char __user *buf, size_t count, loff_t *ppos){int ret;return 0;
}
static ssize_t key_read(struct file *filp, char __user *buf, size_t count, loff_t *ppos){struct key_dev *dev = filp->private_data;int ret = 0; return 0;}
static const struct file_operations key_fops = {.owner = THIS_MODULE,.write = key_write,.open = key_open,.release = key_release,.read = key_read,
};/* 驱动入口 */
static int __init key_init(void){int ret = 0;/* 1.注册字符设备驱动 */timerdev.devid = 0;if(timerdev.devid){timerdev.devid = MKDEV(timerdev.devid, 0);register_chrdev_region(timerdev.devid, DEV_CNT, DEV_NAME);} else {alloc_chrdev_region(&timerdev.devid, 0, DEV_CNT, DEV_NAME);timerdev.major = MAJOR(timerdev.devid);timerdev.minor = MINOR(timerdev.devid);}/* 2.初始化cdev */timerdev.cdev.owner = THIS_MODULE; cdev_init(&timerdev.cdev, &key_fops);/* 3.添加cdev */cdev_add(&timerdev.cdev, timerdev.devid, DEV_CNT); // 错误处理先略过了/* 4.创建类 */timerdev.class = class_create(THIS_MODULE, DEV_NAME);if(IS_ERR(timerdev.class)){return PTR_ERR(timerdev.class);}/* 5.创建设备 */timerdev.device = device_create(timerdev.class, NULL, timerdev.devid, NULL, DEV_NAME);if(IS_ERR(timerdev.device)){return PTR_ERR(timerdev.device);}/* 6. 初始化LED */ret = led_init(&timerdev);if(ret < 0){ret = -EINVAL;goto fail_ledinit;}/* 7. 初始化定时器 */init_timer(&timerdev.timer);timerdev.timer.function = timer_func;timerdev.timer.expires = jiffies + msecs_to_jiffies(500); // 延迟500mstimerdev.timer.data = (unsigned long)&timerdev;add_timer(&timerdev.timer);return 0;fail_ledinit:
fail_device:class_destroy(timerdev.class);
fail_class:cdev_del(&timerdev.cdev);return ret;
}/* 驱动出口 */
static void __exit key_exit(void){/* 关灯 */gpio_set_value(timerdev.led_gpio, 1);/* 删除定时器*/del_timer(&timerdev.timer);/* 注销字符设备驱动 */cdev_del(&timerdev.cdev);unregister_chrdev_region(timerdev.devid, DEV_CNT);device_destroy(timerdev.class, timerdev.devid);class_destroy(timerdev.class);/* 释放io */gpio_free(timerdev.led_gpio);}module_init(key_init);
module_exit(key_exit);
MODULE_LICENSE("GPL");3.4 测试
# VSCODE
make
sudo cp timer.ko /home/for/linux/nfs/rootfs/lib/modules/4.1.15/ -f# 串口
cd /lib/modules/4.1.15/
depmod
modprobe timer.ko # 此时开发板红灯开始闪烁