Open3D入门指南:3D数据处理与可视化利器
Open3D入门指南:3D数据处理与可视化利器
什么是Open3D?
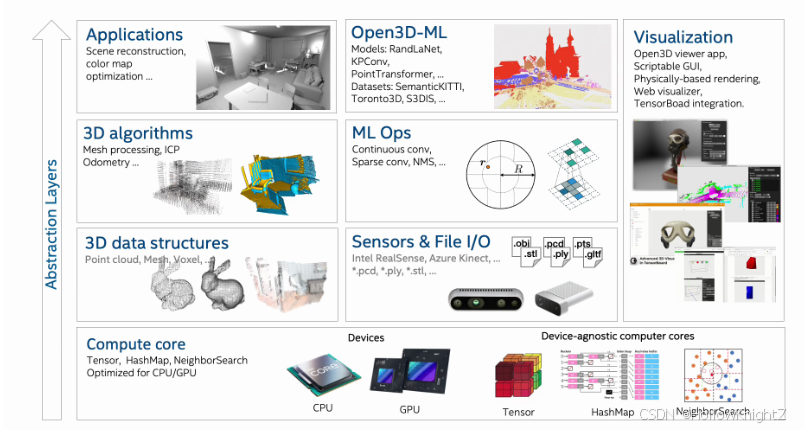
Open3D是一个开源库,支持快速开发和处理3D数据。它提供了丰富的3D数据处理算法和高效的数据结构,支持C++和Python语言,特别适合用于3D深度学习、计算机视觉、机器人等领域的开发。
主要特性
- 高效3D数据结构:PointCloud、VoxelGrid、TriangleMesh等
- 丰富的IO接口:支持ply、xyz、xyzn、pts、pcd等多种格式
- 3D可视化:交互式3D可视化工具
- 3D处理算法:点云滤波、配准、分割、重建等
- 深度学习支持:与PyTorch、TensorFlow等框架集成
安装Open3D
# 使用pip安装
pip install open3d# 或者使用conda安装
conda install -c open3d-admin open3d
基础使用
1. 读取和可视化点云
import open3d as o3d
import numpy as np# 读取点云文件
pcd = o3d.io.read_point_cloud("pointcloud.ply")# 可视化点云
o3d.visualization.draw_geometries([pcd])
2. 创建和可视化网格
# 创建简单网格
mesh = o3d.geometry.TriangleMesh.create_sphere()
mesh.compute_vertex_normals()# 可视化网格
o3d.visualization.draw_geometries([mesh])
3. 点云滤波
# 体素下采样滤波
downpcd = pcd.voxel_down_sample(voxel_size=0.05)# 统计离群点去除
cl, ind = downpcd.remove_statistical_outlier(nb_neighbors=20, std_ratio=2.0)
4. 点云配准
# 使用ICP算法进行点云配准
source = o3d.io.read_point_cloud("source.pcd")
target = o3d.io.read_point_cloud("target.pcd")threshold = 0.02
trans_init = np.identity(4)
reg_p2p = o3d.pipelines.registration.registration_icp(source, target, threshold, trans_init,o3d.pipelines.registration.TransformationEstimationPointToPoint())# 应用变换
source.transform(reg_p2p.transformation)
5. 点云分割
# 平面分割
plane_model, inliers = pcd.segment_plane(distance_threshold=0.01,ransac_n=3,num_iterations=1000)
inlier_cloud = pcd.select_by_index(inliers)
outlier_cloud = pcd.select_by_index(inliers, invert=True)
高级功能
3D重建
# Poisson表面重建
pcd.estimate_normals()
mesh, densities = o3d.geometry.TriangleMesh.create_from_point_cloud_poisson(pcd, depth=9)
与深度学习框架集成
# 将Open3D点云转换为PyTorch张量
import torchpoints = np.asarray(pcd.points)
points_tensor = torch.from_numpy(points).float()# 从PyTorch张量创建Open3D点云
new_pcd = o3d.geometry.PointCloud()
new_pcd.points = o3d.utility.Vector3dVector(points_tensor.numpy())
可视化技巧
# 自定义可视化
vis = o3d.visualization.Visualizer()
vis.create_window()
vis.add_geometry(pcd)# 设置视角
ctr = vis.get_view_control()
ctr.set_zoom(0.8)# 设置渲染选项
opt = vis.get_render_option()
opt.background_color = np.array([0, 0, 0]) # 黑色背景
opt.point_size = 3vis.run()
vis.destroy_window()
实际应用案例
点云配准与重建
# 读取多个点云并配准
pointclouds = []
for i in range(5):pcd = o3d.io.read_point_cloud(f"scan_{i}.ply")pointclouds.append(pcd)# 执行多视角配准
result = o3d.pipelines.registration.multiscale_icp(pointclouds, voxel_sizes=[0.1, 0.05, 0.025], max_iterations=[50, 30, 14])# 融合点云并重建表面
combined = o3d.geometry.PointCloud()
for pcd in pointclouds:combined += pcdmesh = o3d.geometry.TriangleMesh.create_from_point_cloud_poisson(combined)[0]
总结
Open3D是一个功能强大且易于使用的3D数据处理库,它提供了:
- 简洁的API接口
- 高效的算法实现
- 优秀的可视化能力
- 良好的深度学习集成
无论你是从事计算机视觉研究、机器人开发还是3D数据处理,Open3D都能为你提供强大的工具支持。
资源推荐
- Open3D官方文档
- Open3D GitHub仓库
- Open3D教程示例