PID控制器的原理以及PID控制仿真
PID控制是一种广泛应用的自动控制方法,它通过比例(P)、积分(I)和微分(D)三个环节来调节控制量,以实现对被控对象的精确控制。以下是关于PID控制的详细介绍:
1. PID控制器的原理
PID控制器是一种线性控制器,它根据给定值与实际输出值构成控制偏差,将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,对被控对象进行控制。
- 比例(P):比例环节的作用是根据偏差的大小成比例地调整控制量。比例系数(KpK_pKp)越大,控制作用越强,但过大会导致系统振荡。
- 积分(I):积分环节的作用是消除稳态误差。它对偏差进行积分,随着时间的积累,即使偏差很小,积分项也会逐渐增大,从而推动系统向消除误差的方向发展。积分时间常数(TiT_iTi)越小,积分作用越强。
- 微分(D):微分环节的作用是根据偏差的变化率来调整控制量。它能够预测偏差的变化趋势,提前调整控制量,从而加快系统的响应速度,提高系统的稳定性。微分时间常数(TdT_dTd)越大,微分作用越强。
2. PID控制器的数学表达式
PID控制器的输出 u(t)u(t)u(t) 可以表示为:
u(t)=Kpe(t)+KiTi∫0te(τ)dτ+KdTdde(t)dtu(t) = K_p e(t) + \frac{K_i}{T_i} \int_0^t e(\tau) d\tau + K_d T_d \frac{de(t)}{dt}u(t)=Kpe(t)+TiKi∫0te(τ)dτ+KdTddtde(t)
其中:
- e(t)e(t)e(t) 是偏差信号,即给定值与实际输出值的差值。
- KpK_pKp 是比例增益。
- KiK_iKi 是积分增益。
- TiT_iTi 是积分时间常数。
- KdK_dKd 是微分增益。
- TdT_dTd 是微分时间常数。
在离散形式下,PID控制器的输出可以表示为:
u(k)=u(k−1)+Kp[e(k)−e(k−1)]+KiTie(k)+KdTde(k)−2e(k−1)+e(k−2)Tu(k) = u(k-1) + K_p [e(k) - e(k-1)] + \frac{K_i}{T_i} e(k) + K_d T_d \frac{e(k) - 2e(k-1) + e(k-2)}{T}u(k)=u(k−1)+Kp[e(k)−e(k−1)]+TiKie(k)+KdTdTe(k)−2e(k−1)+e(k−2)
其中 TTT 是采样周期。
3. PID控制器的参数整定
PID控制器的性能取决于参数 KpK_pKp、KiK_iKi 和 KdK_dKd 的选择。参数整定的方法有多种,常见的有:
- 经验法:根据经验公式和实际调试结果来调整参数。
- 临界比例度法:通过逐步增加比例增益,使系统产生等幅振荡,然后根据振荡周期来确定参数。
- 衰减曲线法:通过观察系统的响应曲线,调整参数使系统达到期望的衰减比。
- 响应曲线法:通过观察系统对阶跃输入的响应曲线,调整参数使系统达到期望的性能指标。
- 频率特性法:通过分析系统的频率特性,调整参数使系统满足频率域的性能要求。
4. PID控制器的应用
PID控制器广泛应用于工业自动化、机器人控制、航空航天、汽车电子等领域。例如:
- 温度控制:在工业炉、空调系统等中,通过PID控制器调节加热或制冷量,使温度保持在设定值。
- 压力控制:在液压系统、气动系统中,通过PID控制器调节压力,确保系统稳定运行。
- 速度控制:在电机调速系统中,通过PID控制器调节电机转速,使其达到设定值。
- 位置控制:在机器人关节控制、数控机床中,通过PID控制器调节位置,提高控制精度。
5. PID控制器的优缺点
- 优点:
- 结构简单:易于理解和实现。
- 适用范围广:适用于多种类型的被控对象。
- 调节灵活:通过调整参数可以实现不同的控制效果。
- 缺点:
- 参数整定复杂:需要根据具体情况进行调整,且调整过程可能需要多次试验。
- 对模型依赖性较强:如果被控对象的模型发生变化,可能需要重新调整参数。
- 难以处理非线性系统:对于强非线性系统,PID控制器的性能可能不够理想。
6. PID控制器的改进
为了克服传统PID控制器的不足,研究人员提出了许多改进方法,如:
- 模糊PID控制器:结合模糊逻辑,根据模糊规则调整PID参数,提高控制器的适应性和鲁棒性。
- 自适应PID控制器:根据系统的动态特性自动调整PID参数,提高控制器的性能。
- 神经网络PID控制器:利用神经网络学习系统的动态特性,优化PID参数,提高控制精度。
PID控制是一种非常实用的控制方法,在许多领域都有广泛的应用。通过合理选择和调整参数,可以实现对被控对象的精确控制。
7. 模拟PID控制飞行器的高度
通过调节PID的参数来对飞行器的飞行高度进行控制,感受PID各个参数的作用:
import tkinter as tk
from tkinter import ttk
import matplotlib.pyplot as plt
from matplotlib.backends.backend_tkagg import FigureCanvasTkAgg
import numpy as np# PID 控制器类
class PIDController:def __init__(self, kp=0.0, ki=0.0, kd=0.0):self.kp = kpself.ki = kiself.kd = kdself.setpoint = 0.0self.integral = 0.0self.previous_error = 0.0def update(self, feedback_value, dt):error = self.setpoint - feedback_value # Pself.integral += error * dt # Iderivative = (error - self.previous_error) / dt # Doutput = self.kp * error + self.ki * self.integral + self.kd * derivativeself.previous_error = errorreturn output - 1 # 稳态误差 1# GUI 应用
class PIDApp:def __init__(self, root):self.root = rootself.root.title("Flight Height PID Controller")# PID 参数self.kp = tk.DoubleVar(value=10.0)self.ki = tk.DoubleVar(value=0.04)self.kd = tk.DoubleVar(value=0.0)self.setpoint = tk.DoubleVar(value=10000.0)self.height = 0.0self.time = 0.0self.dt = 0.01 # 时间步长# PID 控制器实例self.pid = PIDController(self.kp.get(), self.ki.get(), self.kd.get())# 创建控件self.create_widgets()# 初始化绘图self.init_plot()# 启动实时更新self.update_plot()def create_widgets(self):# PID 参数输入ttk.Label(self.root, text="Kp:").grid(row=0, column=0, padx=5, pady=5)ttk.Entry(self.root, textvariable=self.kp).grid(row=0, column=1, padx=5, pady=5)ttk.Label(self.root, text="Ki:").grid(row=1, column=0, padx=5, pady=5)ttk.Entry(self.root, textvariable=self.ki).grid(row=1, column=1, padx=5, pady=5)ttk.Label(self.root, text="Kd:").grid(row=2, column=0, padx=5, pady=5)ttk.Entry(self.root, textvariable=self.kd).grid(row=2, column=1, padx=5, pady=5)ttk.Label(self.root, text="Setpoint:").grid(row=3, column=0, padx=5, pady=5)ttk.Entry(self.root, textvariable=self.setpoint).grid(row=3, column=1, padx=5, pady=5)ttk.Label(self.root, text="Current Height:").grid(row=4, column=0, padx=5, pady=5)self.height_label = ttk.Label(self.root, text=f"{self.height:.2f}")self.height_label.grid(row=4, column=1, padx=5, pady=5)# 更新按钮ttk.Button(self.root, text="Update PID", command=self.update_pid).grid(row=5, column=0, columnspan=2, pady=10)def init_plot(self):self.fig, self.ax = plt.subplots()self.line, = self.ax.plot([], [], label="Height")self.ax.set_xlabel("Time (s)")self.ax.set_ylabel("Height (m)")self.ax.grid()self.ax.legend()self.canvas = FigureCanvasTkAgg(self.fig, master=self.root)self.canvas.get_tk_widget().grid(row=6, column=0, columnspan=2, padx=5, pady=5)def update_plot(self):# 更新PID参数self.pid.kp = self.kp.get()self.pid.ki = self.ki.get()self.pid.kd = self.kd.get()self.pid.setpoint = self.setpoint.get()print("pid:", self.pid.kp, self.pid.ki, self.pid.kd)# 模拟飞行高度变化control_output = self.pid.update(self.height, self.dt)self.height += control_output * self.dt# + random.uniform(-0.1, 0.1) # 添加一些噪声# 更新时间self.time += self.dt# 更新数据self.x_data = np.append(getattr(self, 'x_data', []), self.time)self.y_data = np.append(getattr(self, 'y_data', []), self.height)# 更新图形self.line.set_data(self.x_data, self.y_data)self.ax.relim()self.ax.autoscale_view()self.canvas.draw()# 更新高度显示self.height_label.config(text=f"{self.height:.2f}")# 每隔一定时间更新一次self.root.after(int(self.dt * 1000), self.update_plot)def update_pid(self):print("update_pid")self.pid.kp = self.kp.get()self.pid.ki = self.ki.get()self.pid.kd = self.kd.get()self.pid.setpoint = self.setpoint.get()if __name__ == "__main__":root = tk.Tk()app = PIDApp(root)root.mainloop()
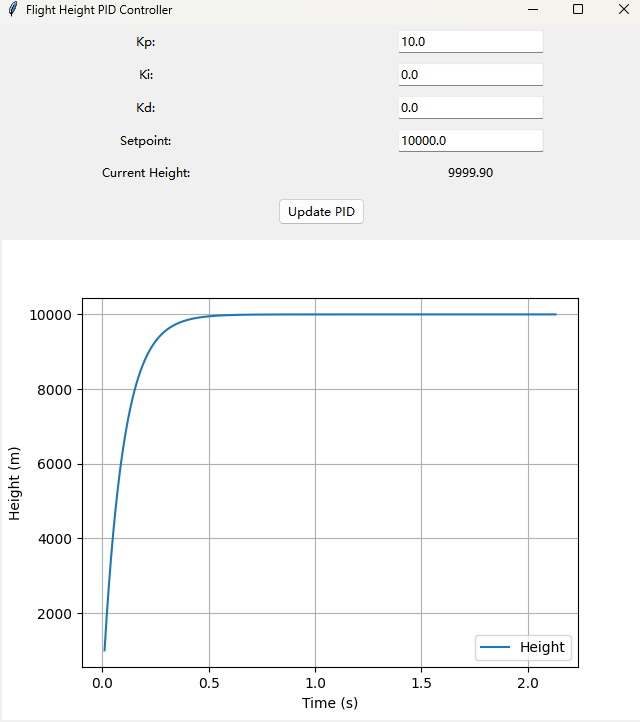
Ki和Kd值为零时,存在稳态偏差:
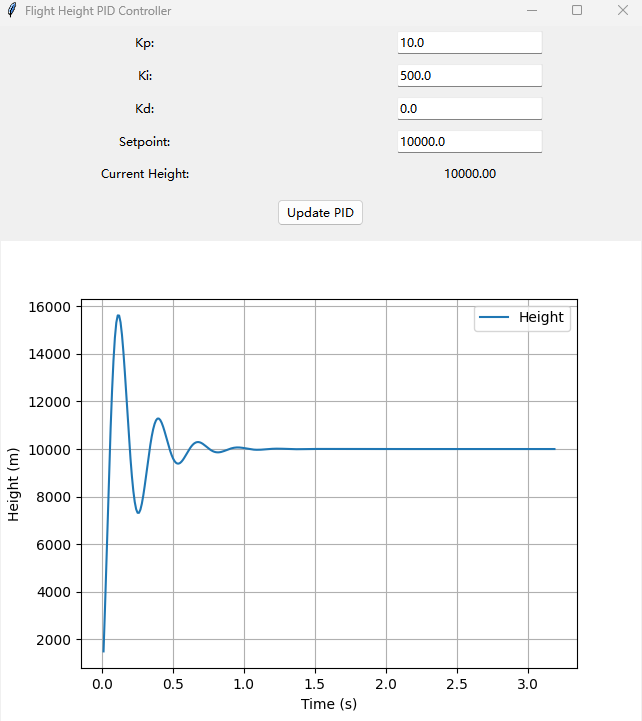
Ki值较大时,会存在震荡:
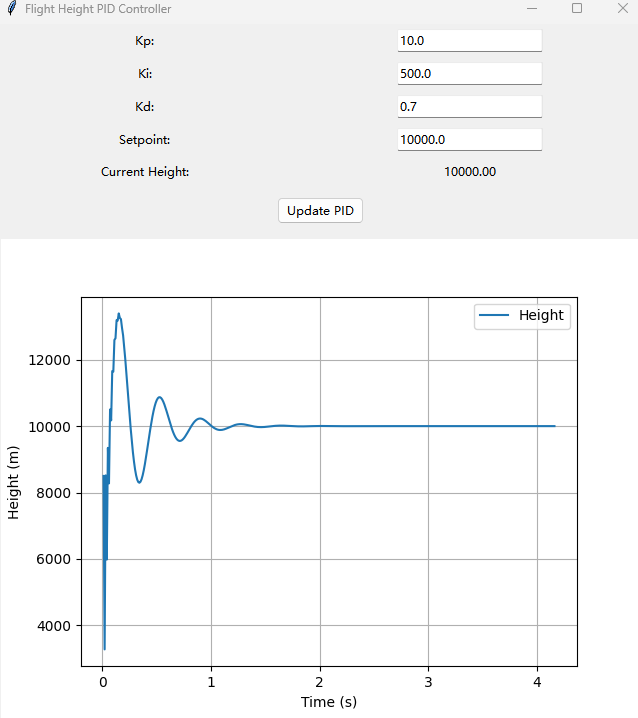
调节Kp值减少震荡: