高等数学 9.1多元函数的基本概念
文章目录
- 一、平面点集 *nnn 维空间
- 1.平面点集
- *2. nnn 维空间
- 二、多元函数的概念
- 三、多元函数的极限
- 四、多元函数的连续性
一、平面点集 *nnn 维空间
1.平面点集
由平面解析几何知道,当在平面上引入了一个平面直角坐标系后,平面上的点 PPP 与有序二元实数组 (x,y)(x, y)(x,y) 之间就建立了一一对应。于是,我们常把有序实数组 (x,y)(x, y)(x,y) 与平面上的点 PPP 视作是等同的。这种建立了坐标系的平面称为坐标平面。二元有序实数组 (x,y)(x, y)(x,y) 的全体,即 R2=R×R={(x,y)∣x,y∈R}\mathbb{R}^2 = \mathbb{R} \times \mathbb{R} = \{ (x, y) | x, y \in \mathbb{R} \}R2=R×R={(x,y)∣x,y∈R} 就表示坐标平面。
坐标平面上具有某种性质 PPP 的点的集合,称为平面点集,记作
E={(x,y)∣(x,y)具有性质P}.E = \{ (x, y) | (x, y)具有性质P \}. E={(x,y)∣(x,y)具有性质P}.
例如,平面上以原点为中心、rrr 为半径的圆内所有的点的集合是
C={(x,y)∣x2+y2<r}.C = \{ (x, y)|x^2 + y^2 < r \}. C={(x,y)∣x2+y2<r}.
如果以点 PPP 表示 (x,y)(x, y)(x,y) ,∣OP∣|OP|∣OP∣ 表示点 PPP 到原点 OOO 的距离,那么集合 CCC 也可以表成
C={P∣∣OP∣<r}C = \{ P | |OP| < r \} C={P∣∣OP∣<r}
现在引入 R2\mathbb{R}^2R2 中邻域的概念。
设 P0(x0,y0)P_0 (x_0, y_0)P0(x0,y0) 是 xOyxOyxOy 平面上的一个点,δ\deltaδ 是某一正数。与点 P0(x0,y0)P_0 (x_0, y_0)P0(x0,y0) 距离小于 δ\deltaδ 的点 P(x,y)P(x, y)P(x,y) 的全体,称为点 P0P_0P0 的 δ\deltaδ 邻域 ,记作 U(P0,δ)U(P_0, \delta)U(P0,δ) ,即
U(P0,δ)={P∣∣PP0∣<δ},U(P_0, \delta) = \{ P | |PP_0| < \delta \}, U(P0,δ)={P∣∣PP0∣<δ},
也就是
U(P0,δ)={(x,y)∣(x−x0)2+(y−y0)2<δ}.U(P_0, \delta) = \{ (x, y) | \sqrt{(x - x_0)^2 + (y - y_0)^2} < \delta \}. U(P0,δ)={(x,y)∣(x−x0)2+(y−y0)2<δ}.
点 P0P_0P0 的去心 δ\deltaδ 邻域,记作 U˚(P0,δ)\mathring{U} (P_0, \delta)U˚(P0,δ) ,即
U˚(P0,δ)={P∣0<∣PP0∣<δ}\mathring{U} (P_0, \delta) = \{ P | 0 < |PP_0| < \delta \} U˚(P0,δ)={P∣0<∣PP0∣<δ}
在几何上,U(P0,δ)U(P_0, \delta)U(P0,δ) 就是 xOyxOyxOy 平面上以点 P0(x0,y0)P_0(x_0, y_0)P0(x0,y0) 为中心、δ>0\delta > 0δ>0 为半径的圆内部的点 P(x,y)P(x, y)P(x,y) 的全体。
如果不需要强调领域的半径 δ\deltaδ ,则用 U(P0)U(P_0)U(P0) 表示点 P0P_0P0 的某个邻域,点 P0P_0P0 的去心邻域记作 U˚(P0)\mathring{U}(P_0)U˚(P0) 。
利用邻域来描述点和点集之间的关系。
任意一点 P∈R2P \in \mathbb{R}^2P∈R2 与任意一个点集 E⊂R2E \subset \mathbb{R}^2E⊂R2 之间必有一下三种关系中的一种:
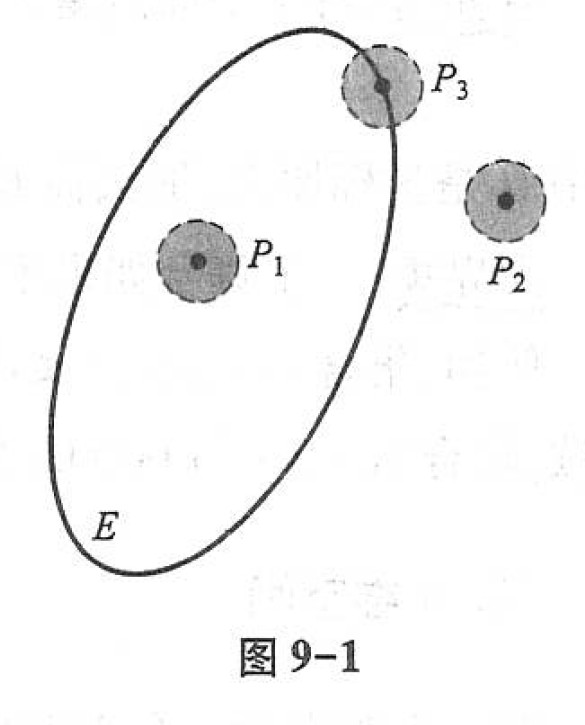
(1)内点 :如果存在点 PPP 的某个邻域 U(P)U(P)U(P) ,使得 U(P)⊂EU(P) \subset EU(P)⊂E ,那么称 PPP 为 EEE 的内点(如图9-1中,P1P_1P1 为 EEE 的内点);
(2)外点 :如果存在点 PPP 的某个邻域 U(P)U(P)U(P) ,使得 U(P)∩E=∅U(P) \cap E = \varnothingU(P)∩E=∅ ,那么称 PPP 为 EEE 的外点(如图9-1中,P2P_2P2 为 EEE 的外点);
(3)边界点 :如果点 PPP 的任一邻域内既含有属于 EEE 的点,又含有不属于 EEE 的点,那么称 PPP 为 EEE 的边界点(如图9-1中,P3P_3P3 为 EEE 的边界点)。
EEE 的边界点的全体,称为 EEE 的 边界 ,记作 ∂E\partial E∂E 。
EEE 的内点必属于 EEE ;EEE 的外点必定不属于 EEE ;而 EEE 的边界点可能属于 EEE ,也可能不属于 EEE 。
任意一点 PPP 与一个点集 EEE 之间除了上述三种关系之外,还有另外一种关系,这就是聚点。
聚点 :如果对于任意给定的 δ>0\delta > 0δ>0 ,点 PPP 的去心邻域 U˚(P,δ)\mathring{U}(P, \delta)U˚(P,δ) 内总有 EEE 中的点,那么称 PPP 是 EEE 的 聚点 。
由聚点的定义可知,点集 EEE 的聚点 PPP 本身,可以属于 EEE ,也可以不属于 EEE 。
例如,设平面点集
E={(x,y)∣1<x2+y2⩽2}.E = \{ (x, y) | 1 < x^2 + y^2 \leqslant 2 \}. E={(x,y)∣1<x2+y2⩽2}.
满足 1<x2+y2<21 < x^2 + y^2 < 21<x2+y2<2 的一切点 (x,y)(x, y)(x,y) 都是 EEE 的内点;满足 x2+y2=1x^2 + y^2 = 1x2+y2=1 的一切点 (x,y)(x, y)(x,y) 都是 EEE 的边界点,它们都不属于 EEE ;满足 x2+y2=2x^2 + y^2 = 2x2+y2=2 的一切点 (x,y)(x, y)(x,y) 也是 EEE 的边界点,它们都属于 EEE ;点集 EEE 以及它的边界 ∂E\partial E∂E 上的一切点都是 EEE 的聚点。
根据点集所属点的特征,再来定义一些重要的平面点集。
开集 :如果点集 EEE 的点都是 EEE 的内点,那么称 EEE 为开集。
闭集 :如果点集 EEE 的边界 ∂E⊂E\partial E \subset E∂E⊂E ,那么称 EEE 为闭集。
例如,集合 {(x,y)∣1<x2+y2<2}\{ (x, y) | 1 < x^2 + y^2 < 2 \}{(x,y)∣1<x2+y2<2} 是开集;集合 {(x,y)∣1⩽x2+y2⩽2}\{ (x, y) | 1 \leqslant x^2 + y^2 \leqslant 2 \}{(x,y)∣1⩽x2+y2⩽2} 是闭集;而集合 {(x,y)∣1<x2+y2⩽2}\{ (x, y) | 1 < x^2 + y^2 \leqslant 2 \}{(x,y)∣1<x2+y2⩽2} 既非开集,也非闭集。
连通集 :如果点集 EEE 内任何两点,都可用折线连接起来,且该折线上的点都属于 EEE ,那么称 EEE 为连通集。
区域 (或 开区域):连通的开集称为区域或开区域。
闭区域 :开区域连同它的边界一起所构成的点集称为闭区域。
例如,集合 {(x,y)∣1<x2+y2<2}\{ (x, y) | 1 < x^2 + y^2 < 2 \}{(x,y)∣1<x2+y2<2} 是区域,而集合 {(x,y)∣1⩽x2+y2⩽2}\{ (x, y) | 1 \leqslant x^2 + y^2 \leqslant 2 \}{(x,y)∣1⩽x2+y2⩽2} 是闭区域。
有界集 :对于平面点集 EEE ,如果存在某一正数 rrr ,使得
E⊂U(O,r)E \subset U(O, r) E⊂U(O,r)
其中 OOO 是坐标原点,那么称 EEE 为有界集。
无界集 :一个集合如果不是有界集,就成这个集合为无界集。
例如,集合 {(x,y)∣1⩽x2+y2⩽2}\{ (x, y) | 1 \leqslant x^2 + y^2 \leqslant 2 \}{(x,y)∣1⩽x2+y2⩽2} 是有界闭区域,集合 {(x,y)∣x+y>0}\{ (x, y) | x + y > 0 \}{(x,y)∣x+y>0} 是无界开区域,集合 {(x,y)∣x+y⩾0}\{ (x, y) | x + y \geqslant 0 \}{(x,y)∣x+y⩾0} 是无界闭区域。
*2. nnn 维空间
设 nnn 为取定的一个正整数,我们用 Rn\mathbb{R}^nRn 表示 nnn 元有序实数组 (x1,x2,⋯,xn)(x_1, x_2, \cdots, x_n)(x1,x2,⋯,xn) 的全体所构成的集合,即
Rn=R×R×⋯×R{(x1,x2,⋯,xn)∣xi∈R,i=1,2,⋯,n}.\mathbb{R}^n = \mathbb{R} \times \mathbb{R} \times \cdots \times \mathbb{R} \{ (x_1, x_2, \cdots, x_n) | x_i \in \mathbb{R}, i = 1, 2, \cdots, n \}. Rn=R×R×⋯×R{(x1,x2,⋯,xn)∣xi∈R,i=1,2,⋯,n}.
Rn\mathbb{R}^nRn 中的元素 (x1,x2,⋯,xn)(x_1, x_2, \cdots, x_n)(x1,x2,⋯,xn) 有时也用单个字母 x\boldsymbol{x}x 来表示,即 x=(x1,x2,⋯,xn)\boldsymbol{x} = (x_1, x_2, \cdots, x_n)x=(x1,x2,⋯,xn) .当所有的 xi(i=1,2,⋯,n)x_i(i = 1, 2, \cdots, n)xi(i=1,2,⋯,n) 都为零时,称这样的元素为 R2\mathbb{R}^2R2 中的零元,记为 0\boldsymbol{0}0 或 OOO 。在解析几何中,通过直角坐标系,R2\mathbb{R}^2R2 (或 R3\mathbb{R}^3R3)中的元素分别与平面(或空间)中的点或向量建立一一对应,因而 Rn\mathbb{R}^nRn 中的元素 x=(x1,x2,⋯,xn)\boldsymbol{x} = (x_1, x_2, \cdots, x_n)x=(x1,x2,⋯,xn) 也称为 Rn\mathbb{R}^nRn 中的一个点或一个 nnn 维向量,xix_ixi 称为点 xxx 的第 iii 个坐标或 nnn 维向量 x\boldsymbol{x}x 的第 iii 个分量。特别地,R2\mathbb{R}^2R2 中的零元 0\boldsymbol{0}0 称为 Rn\mathbb{R}^nRn 中的坐标原点或 nnn 维零向量。
为了在集合 Rn\mathbb{R}^nRn 中的元素之间建立联系,在 Rn\mathbb{R}^nRn 中定义线性运算如下:
设 x=(x1,x2,⋯,xn)\boldsymbol{x} = (x_1, x_2, \cdots, x_n)x=(x1,x2,⋯,xn) ,y=(y1,y2,⋯,yn)\boldsymbol{y} = (y_1, y_2, \cdots, y_n)y=(y1,y2,⋯,yn) 为 Rn\mathbb{R}^nRn 中的任意两个元素,λ∈R\lambda \in \mathbb{R}λ∈R ,规定
x+y=(x1+y1,x2+y2,⋯,xn+yn)λx=(λx1,λx2,⋯,λxn).\boldsymbol{x} + \boldsymbol{y} = (x_1 + y_1, x_2 + y_2, \cdots, x_n + y_n) \\ \lambda \boldsymbol{x} = (\lambda x_1, \lambda x_2, \cdots, \lambda x_n). x+y=(x1+y1,x2+y2,⋯,xn+yn)λx=(λx1,λx2,⋯,λxn).
这样定义了线性运算的集合 Rn\mathbb{R}^nRn 称为 nnn 维空间。
Rn\mathbb{R}^nRn 中的点 x=(x1,x2,⋯,xn)\boldsymbol{x} = (x_1, x_2, \cdots, x_n)x=(x1,x2,⋯,xn) 和点 y=(y1,y2,⋯,yn)\boldsymbol{y} = (y_1, y_2, \cdots, y_n)y=(y1,y2,⋯,yn) 间的距离,记作 ρ(x,y)\rho(\boldsymbol{x}, \boldsymbol{y})ρ(x,y) ,规定
ρ(x,y)=(x1−y1)2+(x2−y2)2+⋯+(xn−yn)2.\rho (\boldsymbol{x}, \boldsymbol{y}) = \sqrt{(x_1 - y_1)^2 + (x_2 - y_2)^2 + \cdots + (x_n - y_n)^2}. ρ(x,y)=(x1−y1)2+(x2−y2)2+⋯+(xn−yn)2.
显然,n=1,2,3n = 1, 2, 3n=1,2,3 时,上述规定与数轴上、直角坐标系下平面及空间中两点间的距离一致。
Rn\mathbb{R}^nRn 中元素 x=(x1,x2,⋯,xn)\boldsymbol{x} = (x_1, x_2, \cdots, x_n)x=(x1,x2,⋯,xn) 与零元 0\boldsymbol{0}0 之间的距离 ρ(x,0)\rho (\boldsymbol{x}, \boldsymbol{0})ρ(x,0) 记作 ∥x∥\| \boldsymbol{x} \|∥x∥ (在 R1,R2,R3\mathbb{R}^1, \mathbb{R}^2, \mathbb{R}^3R1,R2,R3 中,通常将 ∥x∥\| \boldsymbol{x} \|∥x∥ 记作 ∣x∣|\boldsymbol{x}|∣x∣),即
∥x∥=x12+x22+⋯+xn2.\| \boldsymbol{x} \| = \sqrt{x_1^2 + x_2^2 + \cdots + x_n^2}. ∥x∥=x12+x22+⋯+xn2.
采用这一记号,结合向量的线性运算,便得
∥x−y∥=(x1−y1)2+(x2−y2)2+⋯+(xn−yn)2=ρ(x,y)\| \boldsymbol{x} - \boldsymbol{y} \| = \sqrt{(x_1 - y_1)^2 + (x_2 - y_2)^2 + \cdots + (x_n - y_n)^2} = \rho (\boldsymbol{x}, \boldsymbol{y}) ∥x−y∥=(x1−y1)2+(x2−y2)2+⋯+(xn−yn)2=ρ(x,y)
在 nnn 维空间 Rn\mathbb{R}^nRn 中定义了距离以后,就可以定义 Rn\mathbb{R}^nRn 的变元的极限:
设 x=(x!,x2,⋯,xn),a=(a1,a2,⋯,an)∈Rn\boldsymbol{x} = (x_!, x_2, \cdots, x_n) , \boldsymbol{a} = (a_1, a_2, \cdots, a_n) \in \mathbb{R}^nx=(x!,x2,⋯,xn),a=(a1,a2,⋯,an)∈Rn 。如果
∥x−a∥→0,\| \boldsymbol{x} - \boldsymbol{a} \| \to 0, ∥x−a∥→0,
那么称变元 x\boldsymbol{x}x 在 Rn\mathbb{R}^nRn 中趋于固定元 a\boldsymbol{a}a ,记作 x→a\boldsymbol{x} \to \boldsymbol{a}x→a 。
显然,
x→a⇔x1→a1,x2→a2,⋯,xn→an.\boldsymbol{x} \to \boldsymbol{a} \Leftrightarrow x_1 \to a_1, x_2 \to a_2, \cdots, x_n \to a_n . x→a⇔x1→a1,x2→a2,⋯,xn→an.
在 R2\mathbb{R}^2R2 中引入线性运算和距离,使得有关平面点集的一些列概念,可以方便地引入到 n(n⩾3)n(n \geqslant 3)n(n⩾3) 维空间中来。例如,
设 a=(a1,a2,⋯,an)∈Rn\boldsymbol{a} = (a_1, a_2, \cdots, a_n) \in \mathbb{R}^na=(a1,a2,⋯,an)∈Rn ,δ\deltaδ 是某一正数,则 nnn 维空间内的点集
U(a,δ)={x∣x∈R2,ρ(x,a)<δ}U(\boldsymbol{a}, \delta) = \{ \boldsymbol{x} | \boldsymbol{x} \in \mathbb{R}^2, \rho(\boldsymbol{x}, \boldsymbol{a}) < \delta \} U(a,δ)={x∣x∈R2,ρ(x,a)<δ}
就定义为 Rn\mathbb{R}^nRn 中点 a\boldsymbol{a}a 的 δ\deltaδ 邻域。以邻域为基础,可以定义点集的内点、外点、边界点和聚点以及开集、闭集、区域等一系列概念。
二、多元函数的概念
定义1 设 DDD 是 R2\mathbb{R}^2R2 上的一个非空子集,称映射 f:D→Rf:D \to \mathbb{R}f:D→R 为定义在 DDD 上的 二元函数 ,通常记为
z=f(x,y),(x,y)∈Dz = f(x, y), \quad (x, y) \in D z=f(x,y),(x,y)∈D
或
z=f(P),P∈D,z = f(P), \quad P \in D, z=f(P),P∈D,
其中点集 DDD 称为该函数的 定义域 ,xxx 和 yyy 称为 自变量 ,zzz 称为 因变量 。
上述定义中,与自变量 x{x}x 和 y{y}y 的一对值(即二元有序实数组)(x,y){(x, y)}(x,y) 相对应的因变量 z{z}z 的值,也称为 f{f}f 在点 (x,y){(x, y)}(x,y) 处的函数值,记作 f(x,y){f(x, y)}f(x,y) ,即 z=f(x,y){z=f(x, y)}z=f(x,y) .函数值 f(x,y){f(x, y)}f(x,y) 的全体所构成的集合称为函数 f{f}f 的值域,记作 f(D){f(D)}f(D) ,即
f(D)={z∣z=f(x,y),(x,y)∈D}.f(D)=\{z | z=f(x, y),(x, y) \in D\} . f(D)={z∣z=f(x,y),(x,y)∈D}.
与一元函数的情形相仿,记号 f{f}f 与 f(x,y){f(x, y)}f(x,y) 的意义是有区别的,但习惯上常用记号 "f(x,y),(x,y)∈D{f(x, y),(x, y) \in D}f(x,y),(x,y)∈D"或"z=f(x,y),(x,y)∈D{z=f(x, y),(x, y) \in D}z=f(x,y),(x,y)∈D"来表示 D{D}D 上的二元函数 f{f}f .表示二元函数的记号 f{f}f 也是可以任意选取的,例如也可以记为 z=φ(x,y),z=z(x,y){z=\varphi(x, y), z=z(x, y)}z=φ(x,y),z=z(x,y) 等.
类似地,可以定义三元函数 u=f(x,y,z),(x,y,z)∈D{u=f(x, y, z),(x, y, z) \in D}u=f(x,y,z),(x,y,z)∈D 以及三元以上的函数.一般地,把定义 1 中的平面点集 D{D}D 换成 n{n}n 维空间 Rn{\mathbb{R}^{n}}Rn 内的点集 D{D}D ,映射 f:D→R{f: D \rightarrow \mathbb{R}}f:D→R 就称为定义在 D{D}D 上的 n{n}n 元函数,通常记为
u=f(x1,x2,⋯,xn),(x1,x2,⋯,xn)∈Du=f\left(x_{1}, x_{2}, \cdots, x_{n}\right), \left(x_{1}, x_{2}, \cdots, x_{n}\right) \in D u=f(x1,x2,⋯,xn),(x1,x2,⋯,xn)∈D
或简记为
u=f(x),x=(x1,x2,⋯,xn)∈Du=f(x), x=\left(x_{1}, x_{2}, \cdots, x_{n}\right) \in D u=f(x),x=(x1,x2,⋯,xn)∈D
也可记为
u=f(P),P(x1,x2,⋯,xn)∈D.u = f(P), \quad P(x_1, x_2, \cdots, x_n) \in D. u=f(P),P(x1,x2,⋯,xn)∈D.
当 n=2{n=2}n=2 或 n=3{n=3}n=3 时,习惯上将点 (x1,x2){\left(x_{1}, x_{2}\right)}(x1,x2) 与点 (x1,x2,x3){\left(x_{1}, x_{2}, x_{3}\right)}(x1,x2,x3) 分别写成 (x,y){(x, y)}(x,y) 与 (x,y,z){(x, y, z)}(x,y,z) .这时,若用字母表示 R2{\mathbb{R}^{2}}R2 或 R3{\mathbb{R}^{3}}R3 中的点,即写成 P(x,y){P(x, y)}P(x,y) 或 M(x,y,z){M(x, y, z)}M(x,y,z) ,则相应的二元函数及三元函数也可简记为 z=f(P){z=f(P)}z=f(P) 及 u=f(M){u=f(M)}u=f(M) .
当 n=1{n=1}n=1 时,n{n}n 元函数就是一元函数;当 n⩾2{n \geqslant 2}n⩾2 时,n{n}n 元函数统称为多元函数.
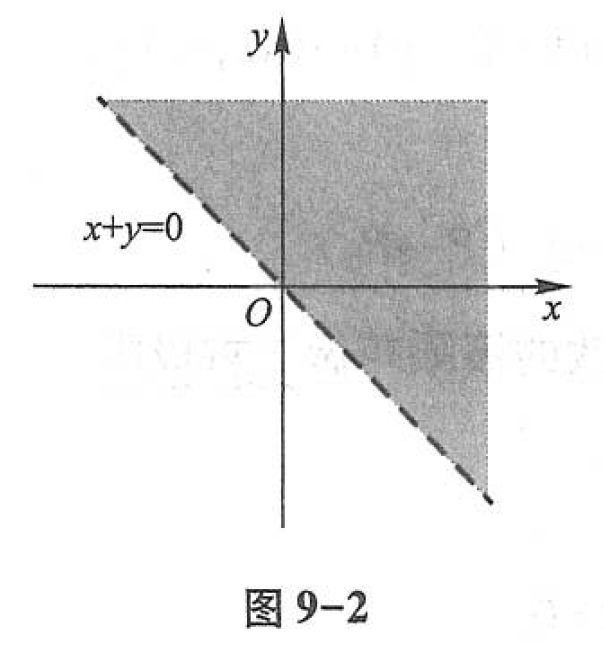
关于多元函数的定义域,与一元函数相类似,我们作如下约定:在一般地讨论用算式表达的多元函数 u=f(x){u=f(x)}u=f(x) 时,就以使这个算式有意义的变元 x{x}x 的值所组成的点集为这个 多元函数的自然定义域 。因而,对这类函数,它的定义域不再特别标出。例如,函数 z=ln(x+y){z=\ln (x+y)}z=ln(x+y) 的定义域为
{(x,y)∣x+y>0}\{(x, y) | x+y>0\} {(x,y)∣x+y>0}
(图 9-2),这是一个无界开区域.
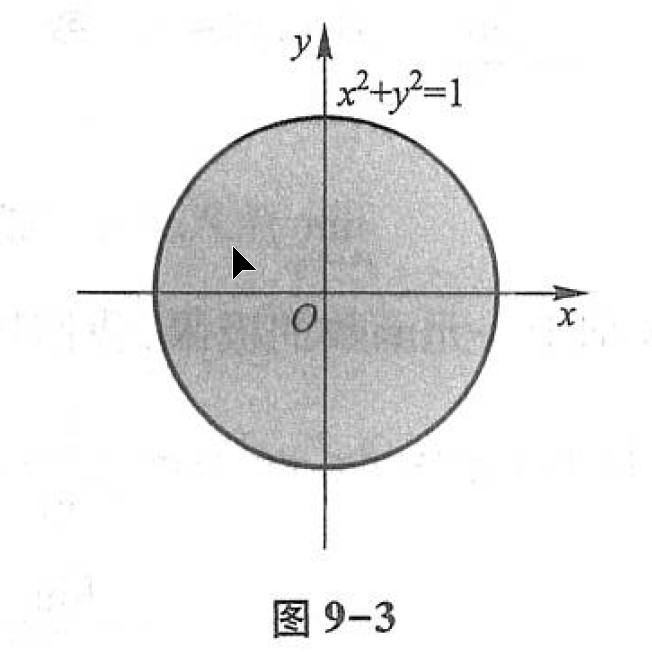
又如,函数 z=arcsin(x2+y2){z=\arcsin \left(x^{2}+y^{2}\right)}z=arcsin(x2+y2) 的定义域为
{(x,y)∣x2+y2⩽1}\left\{(x, y) | x^{2}+y^{2} \leqslant 1\right\} {(x,y)∣x2+y2⩽1}
(图9-3),这是一个有界闭区域.
设函数 $ z=f(x, y) $ 的定义域为 DDD .对于任意取定的点 P(x,y)∈DP(x, y) \in DP(x,y)∈D ,对应的函数值为 $ z=f(x, y) $ .这样,以 xxx 为横坐标、 yyy 为纵坐标和 $ z=f(x, y) $ 为竖坐标在空间就确定一点 M(x,y,z)M(x, y, z)M(x,y,z) .当 (x,y)(x, y)(x,y) 遍取 DDD上的一切点时,得到一个空间点集
{(x,y,z)∣z=f(x,y),(x,y)∈D},\{(x, y, z) \mid z=f(x, y),(x, y) \in D\}, {(x,y,z)∣z=f(x,y),(x,y)∈D},
这个点集称为 二元函数 $ z=f(x, y) $ 的图形 (图9-4).通常我们也说二元函数的图形是一张曲面.
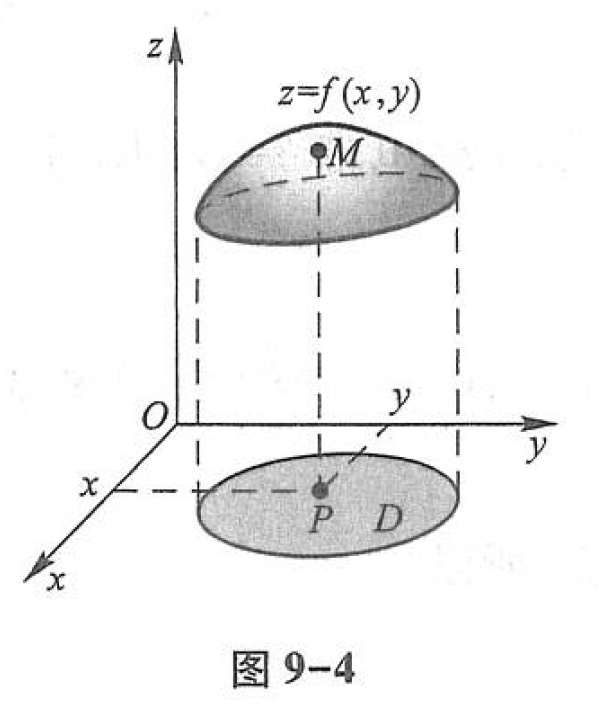
例如,由空间解析几何知道,线性函数 z=ax+by+cz=a x+b y+cz=ax+by+c的图形是一张平面,而函数 z=x2+y2z=x^{2}+y^{2}z=x2+y2 的图形是旋转抛物面.
三、多元函数的极限
先讨论二元函数 z=f(x,y)z=f(x, y)z=f(x,y) 当 (x,y)→(x0,y0)(x, y) \rightarrow\left(x_{0}, y_{0}\right)(x,y)→(x0,y0) ,即 P(x,y)→P0(x0,y0)P(x, y) \rightarrow P_{0}\left(x_{0}, y_{0}\right)P(x,y)→P0(x0,y0) 时的极限.
这里 P→P0P \rightarrow P_{0}P→P0 表示点 PPP 以任何方式趋于点 P0P_{0}P0 ,也就是点 PPP 与点 P0P_{0}P0 间的距离趋于零,即
∣PP0∣=(x−x0)2+(y−y0)2→0.\left|P P_{0}\right|=\sqrt{\left(x-x_{0}\right)^{2}+\left(y-y_{0}\right)^{2}} \rightarrow 0 . ∣PP0∣=(x−x0)2+(y−y0)2→0.
与一元函数的极限概念类似,如果在 P(x,y)→P0(x0,y0)P(x, y) \rightarrow P_{0}\left(x_{0}, y_{0}\right)P(x,y)→P0(x0,y0) 的过程中,对应的函数值 $ f(x, y) $ 无限接近于一个确定的常数 AAA ,那么就说 AAA 是函数 $ f(x, y) $ 当 (x,y)→(x0,y0)(x, y) \rightarrow \left(x_{0}, y_{0}\right)(x,y)→(x0,y0) 时的极限.下面用"ε−δ\varepsilon-\deltaε−δ"语言描述这个极限概念.
定义 2 设二元函数 f(P)=f(x,y)f(P)=f(x, y)f(P)=f(x,y) 的定义域为 D,P0(x0,y0)D, P_{0}\left(x_{0}, y_{0}\right)D,P0(x0,y0) 是 DDD 的聚点.如果存在常数 AAA ,对于任意给定的正数 ε\varepsilonε ,总存在正数 δ\deltaδ ,使得当点 P(x,y)∈D∩U∘(P0,δ)P(x, y) \in D \cap \stackrel{\circ}{U}\left(P_{0}, \delta\right)P(x,y)∈D∩U∘(P0,δ) 时,都有
∣f(P)−A∣=∣f(x,y)−A∣<ε|f(P)-A|=|f(x, y)-A|<\varepsilon ∣f(P)−A∣=∣f(x,y)−A∣<ε
成立,那么就称常数 AAA 为函数 f(x,y)f(x, y)f(x,y) 当 (x,y)→(x0,y0)(x, y) \rightarrow\left(x_{0}, y_{0}\right)(x,y)→(x0,y0) 时的极限,记作
lim(x,y)→(x0,y0)f(x,y)=A或f(x,y)→A((x,y)→(x0,y0)),\lim _{(x, y) \rightarrow\left(x_{0}, y_{0}\right)} f(x, y)=A \quad 或 \quad f(x, y) \rightarrow A\left((x, y) \rightarrow\left(x_{0}, y_{0}\right)\right) , (x,y)→(x0,y0)limf(x,y)=A或f(x,y)→A((x,y)→(x0,y0)),
也记作
limP→P0f(P)=A或f(P)→A(P→P0).\lim _{P \rightarrow P_{0}} f(P)=A \quad 或 \quad f(P) \rightarrow A\left(P \rightarrow P_{0}\right) . P→P0limf(P)=A或f(P)→A(P→P0).
为了区别于一元函数的极限,我们把二元函数的极限叫做 二重极限 。
必须注意,所谓二重极限存在,是指 P(x,y)P(x, y)P(x,y) 以任何方式趋于 P0(x0,y0)P_{0}\left(x_{0}, y_{0}\right)P0(x0,y0) 时, $ f(x, y) $ 都无限接近于 AAA 。因此,如果 P(x,y)P(x, y)P(x,y) 以某一特殊方式,例如沿着一条定直线或定曲线趋于 P0(x0,y0)P_{0}\left(x_{0}, y_{0}\right)P0(x0,y0) 时,即使 $ f(x, y) $ 无限接近于某一确定值,我们还不能由此断定函数的极限存在.但是反过来,如果当 P(x,y)P(x, y)P(x,y) 以不同的方式趋于 P0(x0,y0)P_{0}\left(x_{0}, y_{0}\right)P0(x0,y0) 时, $ f(x, y) $ 趋于不同的值,那么就可以断定这函数的极限不存在.
以上关于二元函数的极限概念,可相应地推广到 nnn 元函数 u=f(P)u=f(P)u=f(P) ,即 u=f(x1u=f\left(x_{1}\right.u=f(x1 , x2,⋯,xn)\left.x_{2}, \cdots, x_{n}\right)x2,⋯,xn) 上去.
关于多元函数的极限运算,有与一元函数类似的运算法则.
四、多元函数的连续性
定义 3 设二元函数 f(P)=f(x,y)f(P)=f(x, y)f(P)=f(x,y) 的定义域为 D,P0(x0,y0)D, P_{0}\left(x_{0}, y_{0}\right)D,P0(x0,y0) 为 DDD 的聚点,且 P0∈DP_{0} \in DP0∈D.如果
lim(x,y)→(x0,y0)f(x,y)=f(x0,y0),\lim _{(x, y) \rightarrow\left(x_{0}, y_{0}\right)} f(x, y)=f\left(x_{0}, y_{0}\right), (x,y)→(x0,y0)limf(x,y)=f(x0,y0),
那么称函数 $ f(x, y) $ 在点 P0(x0,y0)P_{0}\left(x_{0}, y_{0}\right)P0(x0,y0) 连续.
设函数 $ f(x, y) $ 在 DDD 上有定义,DDD 内的每一点都是函数定义域的聚点。如果函数 $ f(x, y) $ 在 DDD 的每一点都连续,那么就称函数 $ f(x, y) $ 在 DDD 上连续,或者称 $ f(x, y) $ 是 DDD上的 连续函数 .
以上关于二元函数的连续性概念,可相应地推广到 nnn 元函数 f(P)f(P)f(P) 上去.
定义 4 设函数 $ f(x, y) $ 的定义域为 D,P0(x0,y0)D, P_{0}\left(x_{0}, y_{0}\right)D,P0(x0,y0) 是 DDD 的聚点.如果函数 $ f(x, y) $ 在点 P0(x0,y0)P_{0}\left(x_{0}, y_{0}\right)P0(x0,y0) 不连续,那么称 P0(x0,y0)P_{0}\left(x_{0}, y_{0}\right)P0(x0,y0) 为函数 $ f(x, y) $ 的间断点.
一切多元初等函数在其定义区域内是连续的。所谓 定义区域 是指包含在定义域内的区域或闭区域。
由多元初等函数的连续性,如果要求它在点 P0P_0P0 处的极限,而该点又在此函数的定义区域内,那么此极限值就是函数在该点的函数值,即
limP→P0f(P)=f(P0).\lim \limits_{P \to P_0} f(P) = f(P_0). P→P0limf(P)=f(P0).
在有界闭区域上连续的多元函数具有如下性质:
性质1(有界性与最大值最小值定理) 在有界闭区域 DDD 上的多元连续函数,必定在 DDD 上有界,且能取得它的最大值和最小值.
性质1就是说,若 f(P)f(P)f(P) 在有界闭区域 DDD 上连续,则必定存在常数 M>0M>0M>0 ,使得对一切 P∈DP \in DP∈D ,有 ∣f(P)∣⩽M|f(P)| \leqslant M∣f(P)∣⩽M ;且存在 P1,P2∈DP_{1}, P_{2} \in DP1,P2∈D ,使得
f(P1)=max{f(P)∣P∈D},f(P2)=min{f(P)∣P∈D}.f\left(P_{1}\right)=\max \{f(P) \mid P \in D\}, \quad f\left(P_{2}\right)=\min \{f(P) \mid P \in D\} . f(P1)=max{f(P)∣P∈D},f(P2)=min{f(P)∣P∈D}.
性质2(介值定理) 在有界闭区域 DDD 上的多元连续函数必取得介于最大值和最小值之间的任何值.
*性质3(一致连续性定理) 在有界闭区域 DDD 上的多元连续函数必定在 DDD 上 一致连续 .
性质3就是说,若 f(P)f(P)f(P) 在有界闭区域 DDD 上连续,则对于任意给定的正数 ε\varepsilonε ,总存在正数 δ\deltaδ ,使得对于 DDD 上的任意两点 P1,P2P_{1}, P_{2}P1,P2 ,只要当 ∣P1P2∣<δ\left|P_{1} P_{2}\right|<\delta∣P1P2∣<δ 时,都有
∣f(P1)−f(P2)∣<ε\left|f\left(P_{1}\right)-f\left(P_{2}\right)\right|<\varepsilon ∣f(P1)−f(P2)∣<ε
成立.
原文链接:高等数学 9.1多元函数的基本概念