Lec. 2: Pytorch, Resource Accounting 课程笔记
本节概述
讨论训练模型所需的所有原语(primitives)
自下而上地从张量到模型,再到优化器再到训练循环。
密切关注效率
特别讨论:
内存(GB)
计算(FLOP)
启发性问题
问题1
在1024个H100上的15T tokens训练70B的模型需要多长时间
total_flops =6 * 70e9 * 15e12(本节课会介绍)
h100_flop_per_sec == 1979e12 / 2(H100每秒的flops)
mfu = 0.5
flops_per_day = h100_flop_per_sec * mfu * 1024 * 60 * 60 * 24(H100每天的flops)
天数=total_flops / flops_per_day
![![[Pasted image 20250810154330.png]]](https://i-blog.csdnimg.cn/direct/b5f26fbae7c44a5a9ac1491925a78ce0.png)
问题2
使用AdamW在八个H100上能训练的最大模型是什么?
H100有80个GB=80e9 bytes
每个参数的字节: bytes_per_parameter = 4 + 4 + (4 + 4) 参数、梯度、优化器状态(AdamW 需要存储两个状态(动量和方差),各 4 字节,共 8 字节)
最大参数数量 = 总显存 ÷ 每个参数所需字节数:num_parameters = (h100_bytes * 8) / bytes_per_parameter=40B
![![[Pasted image 20250810154736.png]]](https://i-blog.csdnimg.cn/direct/e665bea16a5e407e894788547efb69cb.png)
我们天真地将 float32 用于参数和梯度。我们还可以使用 bf16 作为参数和梯度 (2 + 2),并保留参数 (4) 的额外 float32 副本。这不会节省内存,但速度更快。
内存核算
张量是存储所有内容的基本构建块:参数、梯度、优化器状态、数据、激活。
多种方式创建张量:
93 x = torch.tensor([[1., 2, 3], [4, 5, 6]])
94 x = torch.zeros(4, 8) # 4x8 全0矩阵
95 x = torch.ones(4, 8) # 4x8 全1矩阵
96 x = torch.randn(4, 8) # 4x8的二维张量 每个元素都是独立同分布的随机数,符合正态分布(均值为0,标准差为1)
分配未初始化值的:
x = torch.empty(4, 8)
张量内存
几乎所有内容(参数、梯度、激活、优化器状态)都存储为浮点数。
float32(存储优化器状态和参数必须使用)
![![[Pasted image 20250810155503.png]]](https://i-blog.csdnimg.cn/direct/8b57cc164c2546d59c81b819a7b18c62.png)
float32 数据类型(也称为 fp32 或单精度)是默认值。
传统科学计算中,float32是基线,也可以使用双精度(float64)
但一般在深度学习中,flaot32是最大值
内存由每个值的 (i) 值数量和 (ii) 数据类型决定。
假设创建了一个4x8的0矩阵
默认情况下会使用float32
元素个数为32,每个元素大小为4字节(32位=4字节)
内存使用=4*8*4=128字节
在GPT-3前馈层的一个矩阵
(12288x4x12288)x4≈2.3GB
所以我们希望它们变得更小使用更少的内存
float16
![![[Pasted image 20250810161204.png]]](https://i-blog.csdnimg.cn/direct/c59a7190317b4b75bf6b89ca6d710efc.png)
float16 数据类型(也称为 fp16 或半精度)会减少内存。
1e-8的数在float16下会变成0
如果在训练时发生这种情况,可能会变得不稳定。
bfloat16(通常用于计算)
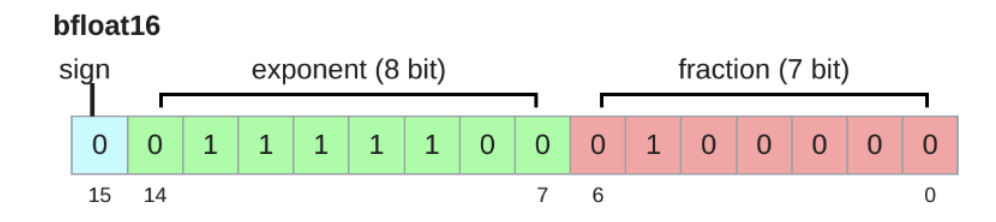
Google Brain 在 2018 年开发了 bfloat(大脑浮点)来解决这个问题。
bfloat16 使用与 float16 相同的内存,但具有与 float32 相同的动态范围!
唯一的问题是分辨率更差,但这对于深度学习来说并不重要。
相同的1e-8在bfloat16下
![![[Pasted image 20250810161713.png]]](https://i-blog.csdnimg.cn/direct/3221f8bacc104d2f91f00255a2597945.png)
fp8
2022 年,在机器学习工作负载的推动下,FP8 实现了标准化。
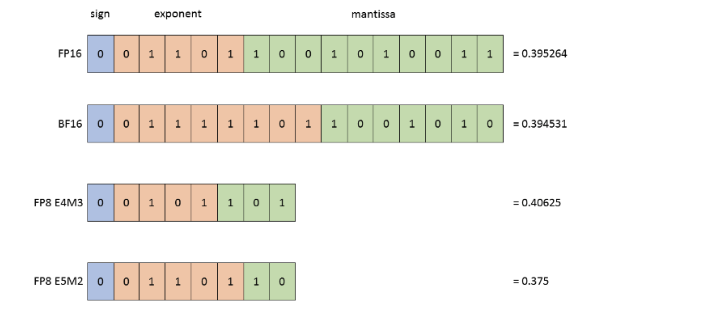
H100 支持 FP8 的两种变体:E4M3(范围 [-448, 448])和 E5M2([-57344, 57344])。
取决于想要更高的分辨率或者更大的动态范围
总结
使用 float32 进行训练是有效的,但需要大量内存。
使用 fp8、float16 甚至 bfloat16 进行训练是有风险的,并且可能会变得不稳定。
解决方案(稍后):使用混合精度训练
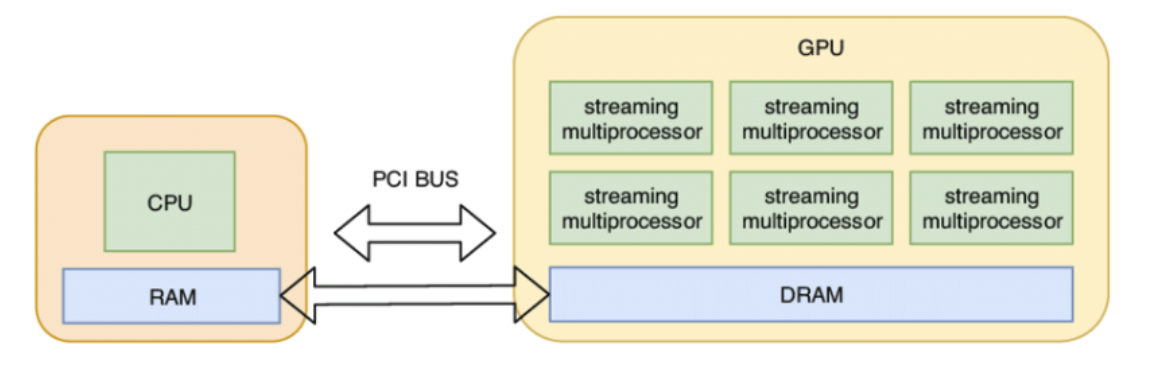
GPU中的张量
默认情况下,张量存储在 CPU 内存中。
然而,为了利用 GPU 的大规模并行性,我们需要将它们移动到 GPU 内存中。
张量操作
大多数张量是通过对其他张量执行操作而创建的。
每个操作都有一些内存和计算结果。
张量存储
PyTorch 中的张量是什么?
PyTorch 张量是指向已分配内存的指针,使用描述如何获取张量任何元素的元数据。
张量切片
许多操作只是提供了张量的不同视图 。
这不会制作副本,因此一个张量的突变会影响另一个张量。
y = x.transpose(1, 0).contiguous().view(2, 3)# 交换张量x的第0、1维并保证他们连续后,将张量重塑为2行3列的形状并赋值给y
view不需要消耗内存和计算,但是contiguous或者reshape会消耗
张量逐元素计算
这些运算对张量的每个元素应用一些运算并返回相同形状的(新)张量。
torch.equal(x.pow(2), torch.tensor([1, 16, 81]))
-
x.pow(2)表示对张量x中的每个元素进行平方运算 -
torch.tensor([1, 16, 81])是一个包含三个元素的张量 -
torch.equal()函数用于检查两个张量的形状和所有元素是否都完全相同 -
x.sqrt()计算每个元素的平方根,结果应为[1, 2, 3] -
x.rsqrt()计算每个元素平方根的倒数,结果应为[1, 1/2, 1/3] -
x + x实现张量与自身的加法,等同于每个元素乘以 2 -
x * 2直接将张量每个元素乘以 2 -
x / 0.5通过除以 0.5 实现与乘以 2 相同的效果
张量矩阵乘法
一般来说,我们对批次中的每个样本以及序列中的每个标记执行操作。
张量操作库einops
Einops 是一个用于作命名维度的张量的库,它的灵感来自爱因斯坦求和符号
命名所有维度,而不是本质上依赖索引
张量浮点运算次数
浮点运算 (FLOP) 是一种基本运算,如加法 (x + y) 或乘法 (x y)。
两个非常令人困惑的首字母缩略词(发音相同!
FLOPs:浮点运算(完成计算的度量)
FLOP/s:每秒浮点运算(也写作 FLOPS),用于测量硬件的速度。
直觉
训练 GPT-3 (2020) 花费了 3.14e23 次 FLOPs。
GPT-4 (2023) 据推测将需要 2e25 FLOP
美国行政命令:任何以 >= 1e26 FLOP 训练的基础模型都必须向政府报告(2025 年撤销)
A100 的峰值性能为 312 teraFLOP/s(312e12)
H100 的峰值性能为 1979 teraFLOP/s,非稀疏性条件下的峰值性能为50%
h100_flop_per_sec == 1979e12 / 2
8 个 H100 2 周:
total_flops = 8 * (60 * 60 * 24 * 7) * h100_flop_per_sec=4.788e21
线性模型
n个点,每个点d个维度
线性模型将每个 d 维向量映射到 k 个输出
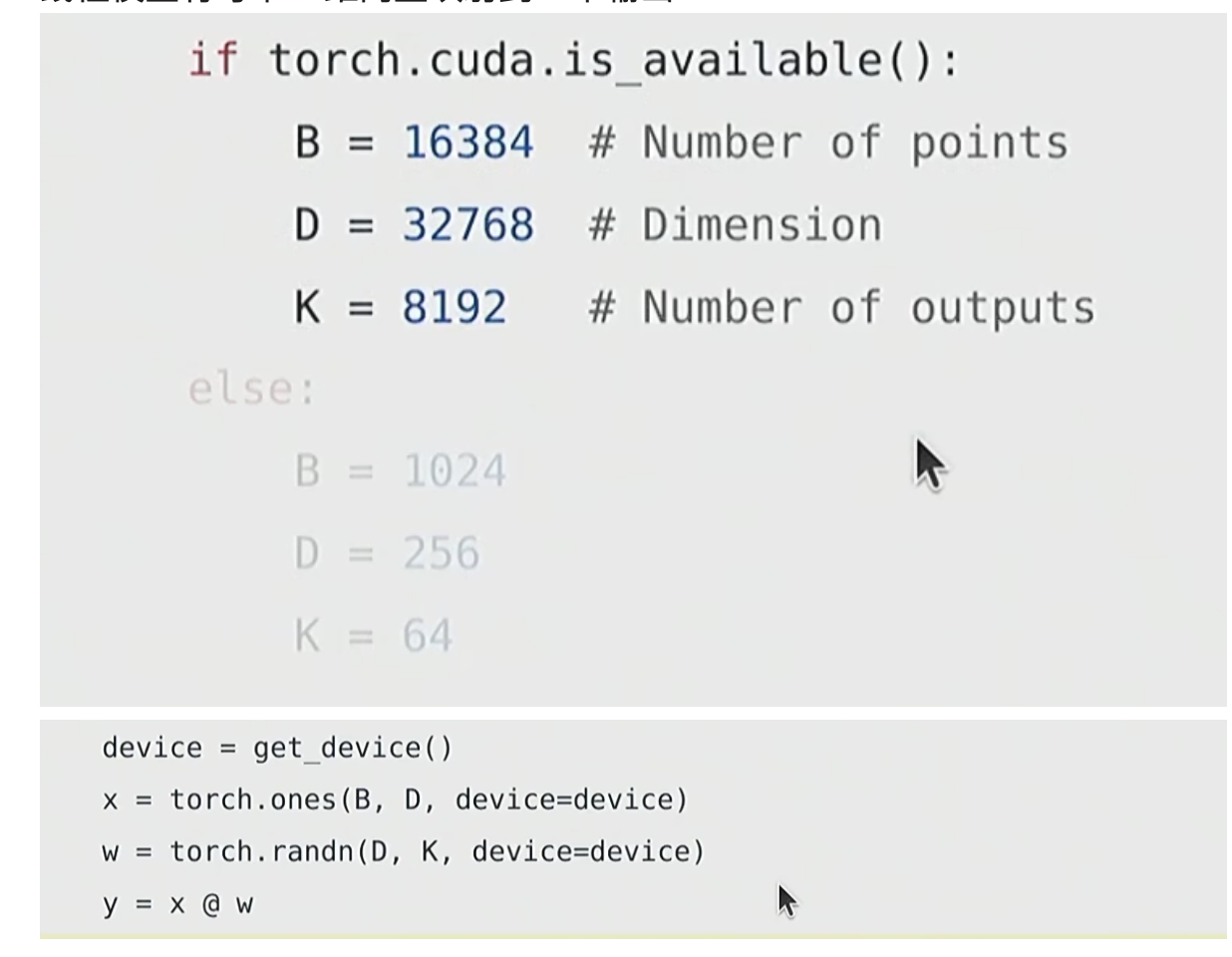
对于每个(i,j,k)三元组,我们都有乘法(x[i][j]∗w[j][k]x[i][j]*w[j][k]x[i][j]∗w[j][k])
actual_num_flops = 2 * B * D * K
- 运算细节:矩阵乘法的本质是嵌套运算,对于输出
y[i][k](第i个样本的第k个输出),其值为:
y[i][k] = x[i][0]*w[0][k] + x[i][1]*w[1][k] + ... + x[i][D-1]*w[D-1][k]
即每个(i, k)位置需要做D次乘法和D-1次加法。 - 总运算量:
- 对所有
B个样本、K个输出,总乘法次数为B * D * K(每个(i, j, k)三元组一次乘法)。 - 总加法次数约为
B * D * K(近似认为加法次数与乘法次数相等,因D-1 ≈ D当D较大时)。 - 因此,总浮点运算次数为
2 * B * D * K(乘法 + 加法各算 1 次 FLOP)。
- 对所有
其他操作的FLOPs
对于一个 m×n 的矩阵(包含 m×n 个元素):
- 当进行逐元素运算时(例如对矩阵中每个元素取平方,或两个同维度矩阵对应元素相加),每个元素都需要 1 次浮点运算。
- 因此,总运算量为元素总数,即 m×n 个 FLOP,用复杂度表示就是 O(mn)(大 O 符号描述算法复杂度的量级)。
以 “两个 m×n 矩阵相加” 为例: - 两个矩阵相加时,需将第一个矩阵的第 i 行第 j 列元素与第二个矩阵的对应位置元素相加,得到结果矩阵的对应元素。
- 整个过程需要对 m×n 对元素进行加法运算,共 m×n 次浮点运算,因此符合 “需要 mn 个 FLOP” 的结论。
一般来说,在深度学习中遇到的其他运算都比足够大的矩阵的矩阵乘法更昂贵。
请注意,FLOP/s 在很大程度上取决于数据类型!
模型 FLOP 利用率 (MFU)
定义:(实际 FLOP/s)/(承诺的 FLOP/s)[忽略通信/开销]
通常,>= 0.5 的 MFU 相当不错(如果 matmuls 占主导地位,则会更高)
让我们用 bfloat16 来做:
这里的 MFU 相当低,可能是因为承诺的 FLOP 有点乐观。
![![[Pasted image 20250810192300.png]]](https://i-blog.csdnimg.cn/direct/b5463805591c4b2eb3278911df5ec063.png)
矩阵乘法占主导地位:(2 m n p) FLOP
FLOP/s 取决于硬件(H100 >> A100)和数据类型(bfloat16 >> float32)
模型 FLOP 利用率 (MFU):(实际 FLOP/s)/(承诺的 FLOP/s)
梯度基础
到目前为止,我们已经构造了张量(对应于参数或数据)并通过运算(向前)传递它们。
现在,我们将计算梯度(向后)。
梯度FLops
重新审视我们的线性模型
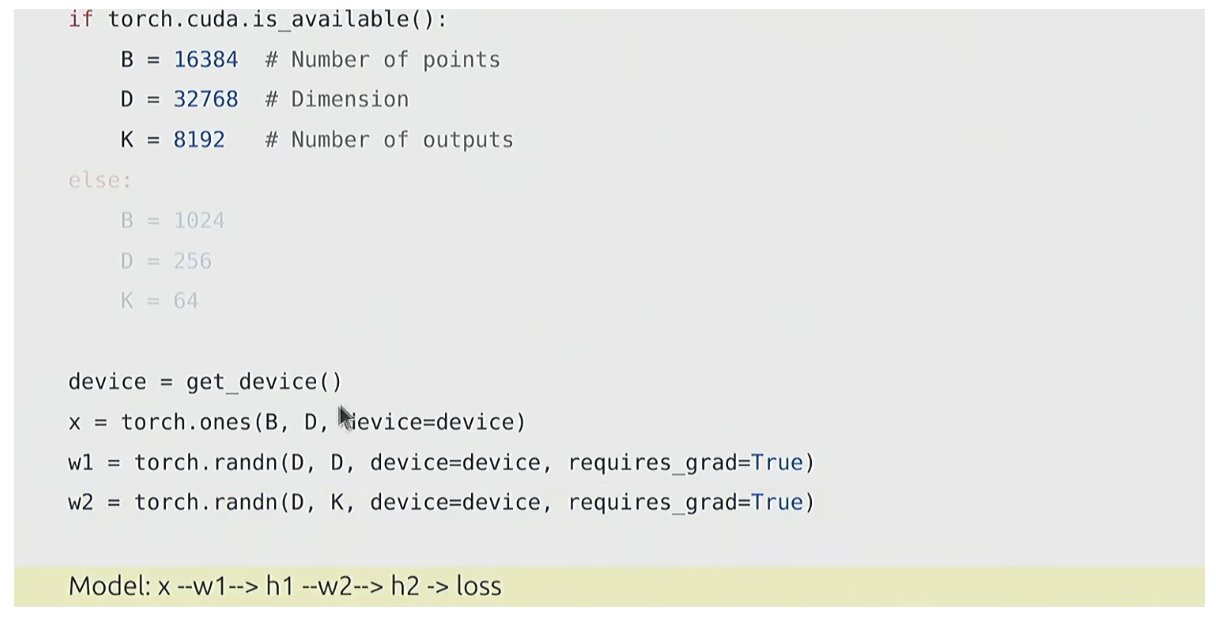
正向计算的FLOPs
- 第一层:输入
x(维度可简化为B×D)与w1(D×D)相乘,得到h1(B×D)。每个元素的计算需要D次乘法 +D-1次加法,近似为2×B×D×D(忽略常数项-1); - 第二层:
h1(B×D)与w2(D×K)相乘,得到h2(B×K)。同理,计算量约为2×B×D×K。
两者相加即得到总正向 FLOPs:num_forward_flops = 2*B*D*D + 2*B*D*K。
反向计算的FLOPs:
1. 计算 w2.grad(权重梯度)
根据链式法则,w2.grad[j,k] 的计算式为:
(w2.grad[j,k]=∑i=1Bh1[i,j]⋅h2.grad[i,k])(w2.grad[j,k] = \sum_{i=1}^{B} h1[i,j] \cdot h2.grad[i,k])(w2.grad[j,k]=∑i=1Bh1[i,j]⋅h2.grad[i,k])
- 数学操作: 对每个
(j,k)元素,需计算B次乘法和B-1次加法(累加)。 单元素 FLOPs:2B(近似,忽略B-1与B的差异) 总元素数:D×K总 FLOPs:2B × D×K = 2B D K
2. 计算 h1.grad(隐藏层梯度)
链式法则下,h1.grad[i,j] 的计算式为:
(h1.grad[i,j]=∑k=1Kw2[j,k]⋅h2.grad[i,k])(h1.grad[i,j] = \sum_{k=1}^{K} w2[j,k] \cdot h2.grad[i,k])(h1.grad[i,j]=∑k=1Kw2[j,k]⋅h2.grad[i,k])
- 数学操作: 对每个
(i,j)元素,需计算K次乘法和K-1次加法。 单元素 FLOPs:2K总元素数:B×D总 FLOPs:2K × B×D = 2B D K
3. 计算 w1.grad(第一层权重梯度)
类似地,w1.grad[j,l] 的计算式为:
(w1.grad[j,l]=∑i=1Bx[i,l]⋅h1.grad[i,j])(w1.grad[j,l] = \sum_{i=1}^{B} x[i,l] \cdot h1.grad[i,j])(w1.grad[j,l]=∑i=1Bx[i,l]⋅h1.grad[i,j])
- 数学操作: 对每个
(j,l)元素,需计算B次乘法和B-1次加法。 单元素 FLOPs:2B总元素数:D×D总 FLOPs:2B × D×D = 2B D²
4. 计算 x.grad(输入梯度)
若需要计算输入梯度,公式为:
(x.grad[i,l]=∑j=1Dw1[j,l]⋅h1.grad[i,j])(x.grad[i,l] = \sum_{j=1}^{D} w1[j,l] \cdot h1.grad[i,j])(x.grad[i,l]=∑j=1Dw1[j,l]⋅h1.grad[i,j])
- 数学操作: 对每个
(i,l)元素,需计算D次乘法和D-1次加法。 单元素 FLOPs:2D总元素数:B×D总 FLOPs:2D × B×D = 2B D²
总结
前向传播约为2*数据*参数 FLOPs
反向传播约为:4*数据*参数 FLOPs
总计6*数据*参数 FLOPs
模型参数
模型参数在 PyTorch 中存储为 nn。参数对象。
输入维度16384
输出维度32
w = nn.Parameter(torch.randn(input_dim, output_dim))
数据初始化
x = nn.Parameter(torch.randn(input_dim))
output = x @ w # @inspect output
请注意, 输出的每个元素都按 sqrt(input_dim): 18.919979095458984 缩放。
大值会导致梯度爆炸并导致训练不稳定。
为此,我们只需重新缩放 1/sqrt(input_dim)
w = nn.Parameter(torch.randn(input_dim, output_dim) / np.sqrt(input_dim))
output = x @ w # @inspect output
现在输出的每个元素都是恒定的:-1.5302726030349731。
自定义模型
使用nn.Parameter建立一个简单的深度线性模型。
随机性注意事项
随机性出现在许多地方:参数初始化、删除、数据排序等。
为了可重现性,我们建议您始终为每次使用随机性传入不同的随机种子。
确定性在调试时特别有用,因此您可以找到错误。
为了安全起见,有三个地方可以设置随机种子,您应该同时完成所有操作。
# Torch
seed = 0
torch.manual_seed(seed)
# NumPy
import numpy as np
np.random.seed(seed)
# Python
random.seed(seed)
数据加载
在语言建模中,数据是整数序列(由分词器输出)。
将它们序列化为 numpy 数组(由分词器完成)很方便。
orig_data = np.array([1, 2, 3, 4, 5, 6, 7, 8, 9, 10], dtype=np.int32)
如果不想一次将整个数据加载到内存中(LLaMA data is 2.8TB).
使用 memmap 仅将访问的部分延迟加载到内存中。
data = np.memmap(“data.npy”, dtype=np.int32)
优化器
让我们定义 AdaGrad 优化器
动量 = SGD + 梯度的指数平均
AdaGrad = SGD + 按梯度平方平均
RMSProp = AdaGrad + 梯度平方的指数平均
Adam = RMSProp + 动量
检查点
训练语言模型需要很长时间,而且肯定会崩溃。你不想失去所有的进度。
在训练期间,定期将模型和优化器状态保存到磁盘非常有用。
混合精度训练
数据类型(float32、bfloat16、fp8)的选择需要权衡。
更高的精度:更准确/更稳定、内存更多、计算更多
精度较低:精度/稳定性较低、内存较少、计算量较少
我们怎样才能两全其美?
解决方案:默认使用 float32,但尽可能使用 {bfloat16, fp8}。
具体:
使用 {bfloat16, fp8} 进行前向传递(激活)。
其余部分(参数、渐变)使用 float32。
总结
问题1:训练模型时,总浮点运算量(FLOPs)如何计算?
总FLOPs约为6×数据量×参数量。其中前向传播占2×数据量×参数量,反向传播(含梯度计算)占4×数据量×参数量。
问题2:在给定硬件(如H100)上,如何估算训练模型的时间?
需先计算总FLOPs,再结合硬件性能(如H100的有效FLOP/s,约为1979e12/2,考虑非稀疏性)、模型FLOP利用率(MFU,通常取0.5)及设备数量,公式为:时间=总FLOPs÷(单设备有效FLOP/s×MFU×设备数量)。
问题3:使用AdamW优化器时,如何确定硬件可支持的最大模型参数?
每个参数需存储参数(4字节)、梯度(4字节)及优化器状态(动量和方差,共8字节),总计16字节。最大参数量=总显存÷16字节。例如8个80GB H100,总显存640GB,最大参数约40B。
问题4:深度学习中常用的浮点数据类型(float32、bfloat16、fp8)各有何特点?
float32(4字节)精度高,适合存储参数和优化器状态;bfloat16(2字节)动态范围与float32一致,分辨率较低,适合计算;fp8(1字节)内存占用最小,分E4M3(高分辨率)和E5M2(大动态范围),需平衡精度与效率。
问题5:什么是模型FLOP利用率(MFU)?其典型值为何?
MFU是实际FLOP/s与硬件理论峰值FLOP/s的比值,反映硬件效率。通常MFU≥0.5即为较优,矩阵乘法占比越高,MFU越接近理论值。
问题6:混合精度训练的核心思想是什么?
结合不同精度优势,用低精度(如bfloat16、fp8)进行前向计算(激活)以节省内存和提升速度,用高精度(如float32)存储参数、梯度和优化器状态以保证训练稳定性。