OptiTrack光学跟踪系统,提高机器人活动精度
研究人员采用OptiTrack提高机器人移动的自适应自动化装配精度
Aachen工业大学是德国第二大技术大学,也是欧洲科学、工程和技术课程的领先机构。Aachen工业大学机床与生产工程实验室(WZL)在生产技术领域有着悠久的开创性研究历史。该实验室成立于1906年,其工作重点是推进基础理论,同时将研究结果应用于现实世界的工业应用。目标是开发可以无缝集成到生产过程中的实用解决方案。
WZL的研究领域之一包括在自动化生产和装配环境中使用机器人技术。随着消费者的偏好越来越多地转向产品定制,WZL的研究人员正在专注于提高机器人在生产车间的适应性。
WZL团队互操作传感器服务负责人Matthias Bodenbenner表示:“汽车、船舶、飞机和其他产品的制造要求正越来越符合个性化规格。这一趋势给自动化装配过程带来了挑战。”

WZL研究助理Guillaume Tréheux举了一个例子:“考虑一个固定站中的典型机器人手臂可以可靠地重复相同的程序。然而,手臂对生产系统的变化适应性不强。例如,如果你想给汽车涂上不同的颜色,机器人手臂可以毫无问题地处理该情况。但用独特的部件组装一辆完全不同的汽车是一个完全不同的挑战。”
Tréheux表示,为了使自动化流程有效地适应这些变化,移动机器人解决方案变得更加可行。他说:“然而,关键的局限性是移动机器人,尤其是自动导引车(AGV)或自主移动机械手(AMM)的绝对精度较低。”。Tréheux解释说,这可能是由于本地化挑战或生产车间不均匀等因素造成的,这些因素可能会导致与预期运动的偏差。

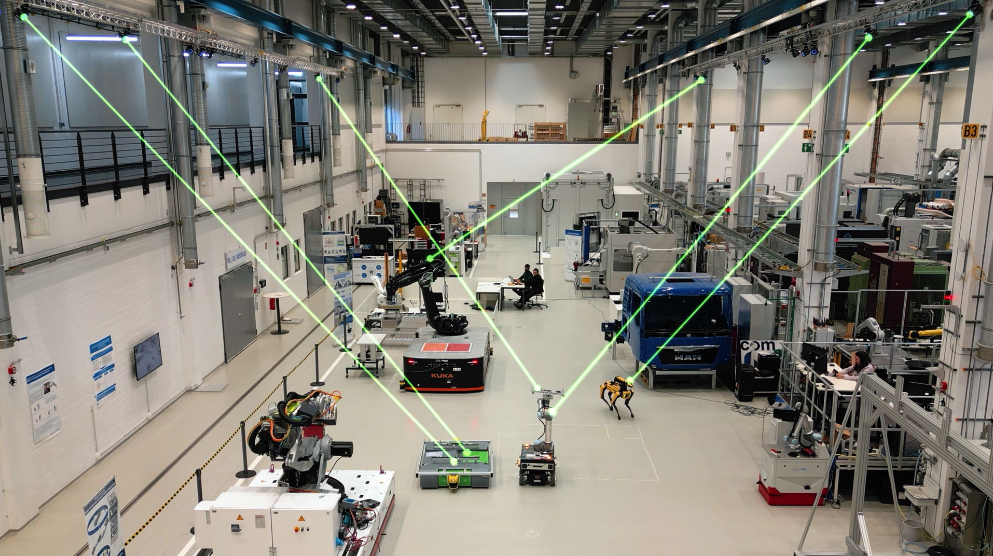
为了提高移动机器人在自动化生产环境中的准确性,WZL实验室集成了一套大型OptiTrack运动捕捉装置,该装置配备了多个PrimeX41摄像头。结合Motive软件,OptiTrack系统能够捕获精确的位置数据,并将其传输到控制机器人的高性能计算系统。
博登本纳说:“OptiTrack是我们工业4.0方法的关键部分,在这种解决方案中,我们实验室的所有组件都是连接在一起的,并能够不断提供数据。通过OptiTrack系统,我们可以收集机器人位置、运动、速度和其他关键因素的精确数据。这些知识对于不断改进机器人的运动至关重要,使它们能够以所需的精度完成任务。”
WZL的研究人员表示,运动捕捉跟踪对于在灵活的装配步骤中实现机器人精度至关重要,无论是涉及操作螺丝刀等小型工具还是处理飞机外板等大型部件,由于产品的关键性,严格的安全标准和更加严苛的公差控制都是必要的。

对于装配车间,与其他系统相比,OptiTrack的Motive软件因其准确性和更高的灵活性成为首选。博登本纳说:“OptiTrack并不局限于一次只跟踪一个目标。我们可以同时跟踪多个机器人。”
这种能力使研究人员能够精确地协调机器人的运动,使它们能够同步工作。“通过并行化机器人工作流程,我们可以潜在地提高自动化流程的效率,”Tréheux说到。