无人机迫降模式技术要点解析
一、迫降模式的核心流程
1. 故障检测与模式触发
多级判断机制:持续监测电机状态(如停转)、电量(如剩余电量<10%)、传感器数据(IMU/GPS/视觉)等,触发条件包括电机故障(如三桨失效)、低电量、通信中断等。
编队协同响应:故障无人机通过广播信号通知编队成员,同步启动避让路径规划,避免碰撞。
2. 路径规划与姿态控制
自适应路径生成:
单机故障:采用圆弧引导法规划从故障点到迫降点的路径。
动力失效(固定翼):基于剩余能量模型选择滑翔策略(直接迫降或盘旋降高)。
特殊姿态补偿:
三桨模式下重构操控逻辑(俯仰杆控南北向,横滚杆控东西向),需用户配合调整自旋漂移。
低电量时允许用户微调降落点,但系统强制持续降高。
3. 着陆阶段控制
地面适应性策略:
平坦地面:匀速降推力,保持垂直速度稳定。
复杂斜面:启用PID-MPC模型预测控制,动态调整油门与姿态角抑制弹跳。
辅助装置:
无动力无人机启动降落伞(空速≤阈值)并配合电池弹射机构。
水上迫降时展开缓冲气囊,通过底部喷气腔体减速。
二、关键技术要点
1. 多源故障检测与实时决策
要点:融合冗余传感器数据(IMU/GPS/视觉)实现故障隔离,结合历史飞行数据库匹配当前状态生成迫降模型。
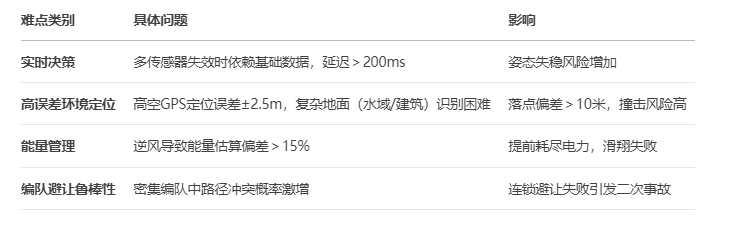
难点:极端故障(如多传感器失效)下依赖基础惯性数据,决策延迟>200ms可能导致姿态失稳。
2. 动力异常下的姿态控制
要点:
三桨模式:力矩重分配算法补偿缺失动力,维持滚转/俯仰可控性。
固定翼滑翔:切换俯仰角-空速控制模态。
难点:自旋漂移需用户干预,远距离图传中断(>2km)时高空落点预判误差达10米级。
3. 精准着陆点定位
要点:结合深度相机与下视定位实时评估坡度/障碍物,动态切换平面/斜面策略。
难点:现有“迫降点”投影仅在<15米高度生效,高空粗定位(GPS误差±2.5m)难以避开危险区。
4. 能量管理与轨迹优化
要点:建立单位剩余能量模型,在能量低于边界值时终止盘旋,直接滑翔迫降。
难点:逆风/乱流环境下能量估算偏差>15%,可能提前耗尽电力。
5. 编队协同避让
要点:将迫降路径点设为动态障碍物,其余无人机采用警戒时间机制避让。
难点:密集编队路径冲突概率高,局部最优解可能导致连锁避让失败。
三、核心难点与挑战
四、创新解决方案
1. 基于历史数据的自主迫降
调用存储模块中的历史飞行数据与着陆模型匹配,实现无GPS/IMU信号时的自主决策(如弹射电池降低重心防翻转)。
2. 分离式负载设计
动力失效时分离负载与无人机,减轻重量并防止螺旋桨缠绕降落伞。
3. Dubins轨迹能量管理
针对固定翼无人机,设计低能(CS类航迹)与高能(CSC类航迹)迫降路径,通过盘旋降高圆调整能量消耗速率。
4. 升力翼多旋翼滑翔控制
结合四旋翼与固定翼结构,动力失效时通过气动舵面控制滑翔,着陆垂直速率可控制在2m/s内。
