3D检测笔记:基础坐标系与标注框介绍
目录
- 二维坐标系
- 图像坐标系
- 像素坐标系
- 三维坐标系
- 左手系与右手系
- 判定
- 特点
- 相机坐标系
- 车身/激光雷达坐标系
- 深度坐标系
- 东北天(ENU)坐标系
- 标注框
二维坐标系
图像坐标系
- 原点: 左上角为原点。
- 坐标轴:从上到下为y轴,从左到右为x轴。
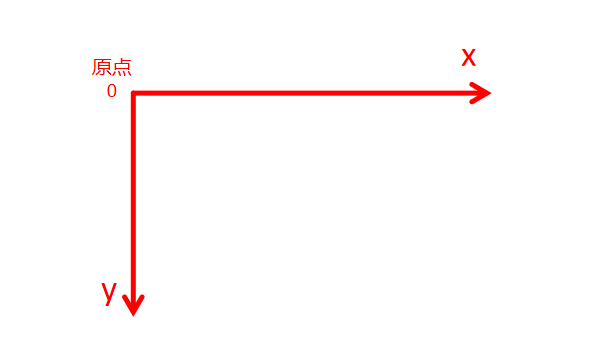
像素坐标系
- 原点:图像左上角(与屏幕坐标系一致)。
- 坐标轴:横轴(u)为列数,纵轴(v)为行数,单位为像素。
- 特点:OpenCV的像素坐标系与传统数学坐标系Y轴方向相反(向下为正)。

三维坐标系
左手系与右手系
判定
左手系和右手系并不是两个固定的坐标系,而是x,y,z轴的两个组合顺序。
判定左手系和右手系的方法也很简单:====
- 右手大拇指指向Z轴方向,其余四指由X轴指向Y轴;符合这个条件的为右手系。
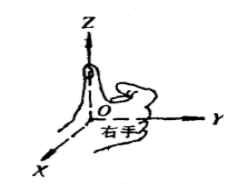
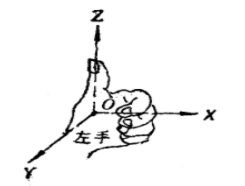
- 左手大拇指指向Z轴方向,其余四指由X轴指向Y轴;符合这个条件的为左手系。
特点
- 从垂直旋转轴的上方看,右手系逆时针旋转为正,顺时针为负。
左手系顺时针为正方向,逆时针为负方向。 - 同为左手系或者右手系的坐标变换是刚体变换,可以用旋转矩阵+平移矩阵表示。
相机坐标系
相机坐标系是右手系,以镜头主光轴中心为原点,定义为右(x)、下(y)、前(z)。

可以简记为在图像坐标系的基础上加入向前的深度(Z)轴。
车身/激光雷达坐标系
现在最常用的激光雷达/车身的坐标系也是采用右手系,具体定义为:前(X)、左(Y)、上(Z)

深度坐标系
深度坐标系(Depth),此坐标系主要被用于通过深度相机采集的数据集, 大多是室内场景点云检测。
在MMDetection3D中定义如下:

东北天(ENU)坐标系
东北天坐标系(ENU)一般用于导航和地理信息系统的局部参考坐标系。
E是East的缩写,表示X轴指向的方向为正东;N是North的缩写,表示Y轴指向的方向为正北;U是Up的缩写,表示Z指向的方向为垂直于水平面向上(天顶),XYZ构成右手坐标系。
标注框
这里采用MMDetection3D的标准来介绍3D标注框:
在 3D 目标检测中,框 Box 通常表示为:(x, y, z, x_size, y_size, z_size, yaw)。
其中 (x, y, z) 表示框的位置 ,(x_size, y_size, z_size) 表示框的尺寸,yaw 表示框的朝向角。
MMDetection3D中,以x轴方向为参考方向,定义各个参数的意义为:
- 3D 框的尺寸 (x_size, y_size, z_size),按惯例定义为物体 3D 框在朝向角 yaw 角度为 0 时沿着 x, y, z 轴三个方向的长度。
- 朝向角Yaw,定义为与参考方向的夹角(0-180°)。在深度坐标系、激光雷达坐标系当中大小的定义与右手系标准相同,即朝向角增大的方向为逆时针,也就是说从x轴到朝向边,逆时针为正,顺时针为负。
深度坐标系标准:

雷达坐标系标准:

相机坐标系标准(朝向角大小与右手系相反):
