【2025CVPR-目标检测方向】RaCFormer:通过基于查询的雷达-相机融合实现高质量的 3D 目标检测
1. 研究背景与动机
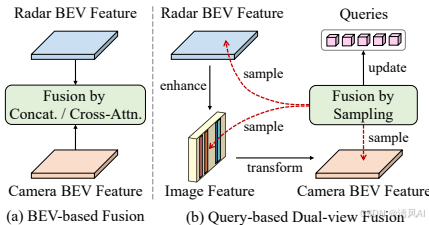
- 问题:现有雷达-相机融合方法依赖BEV特征融合,但相机图像到BEV的转换因深度估计不准确导致特征错位;雷达BEV特征稀疏,相机BEV特征因深度误差存在畸变。
- 核心思路:提出跨视角查询融合框架,通过对象查询(object queries)同时采样图像视角(原始图像)和BEV视角的特征,解决异质特征对齐问题。
2. 核心创新点
2.1 环形可调密度查询初始化
- 设计:将查询点分布在同心圆上,内圈查询数少(80个),外圈按线性因子α(≈1.25)递增。例:nuScenes设置6圈,总查询数900。
- 优势:解决径向初始化(RayFormer)在远距离查询稀疏的问题,适配传感器投影特性。