基于GIS的无人机模拟飞行控制系统设计与实现
随着无人机技术的不断发展,基于GIS的无人机飞行控制系统在各类应用中逐渐发挥着重要作用。为了提高无人机飞行的精度和安全性,本文设计并实现了一种基于GIS的无人机模拟飞行控制系统,该系统采用SpringBoot、Vue、MySQL以及高德地图等技术,旨在通过地理信息数据精确规划飞行路径并实时监控飞行状态。
系统主要由三个部分组成:前端展示、后端服务和飞行控制模块。前端采用Vue框架开发,结合高德地图API展示实时的飞行路线、飞行状态以及周边环境信息。用户可以通过Web界面实时查看飞行数据,并进行路径调整和监控。后端使用SpringBoot框架进行开发,负责接收用户请求、处理飞行数据以及与前端进行数据交互。系统通过MySQL数据库存储用户信息、飞行记录及地理信息数据,并支持路径规划及历史数据的查询。基于高德地图的GIS技术,系统能够实时获取地理信息数据,提供精确的飞行路径规划和动态调整,确保飞行过程中能避开障碍物、优化航线,保障飞行安全。
通过建立无人机飞行仿真平台,系统能够模拟无人机的飞行状态,提供实时反馈,并能够根据不同的飞行需求自动调整飞行路线。实验结果表明,系统能够有效提高飞行路径的精确度与安全性,具备较好的用户体验和操作便捷性。
本文的研究不仅展示了GIS技术与无人机控制系统的结合,还为未来无人机智能控制与路径优化提供了理论和技术支持。
关 键 词:无人机;GIS;SpringBoot;Vue;高德地图;MySQL;飞行控制;路径规划
ABSTRACT
With the continuous development of drone technology, GIS based drone flight control systems are gradually playing an important role in various applications. In order to improve the accuracy and safety of drone flight, this paper designs and implements a GIS based drone simulation flight control system. The system adopts technologies such as SpringBoot, Vue, MySQL, and Amap, aiming to accurately plan flight paths and monitor flight status in real time through geographic information data.
The system mainly consists of three parts: front-end display, back-end services, and flight control module. The front-end is developed using the Vue framework, combined with the Amap API to display real-time flight routes, flight status, and surrounding environment information. Users can view flight data in real-time through a web interface and make path adjustments and monitoring. The backend is developed using the SpringBoot framework, responsible for receiving user requests, processing flight data, and interacting with the frontend for data exchange. The system stores user information, flight records, and geographic information data through a MySQL database, and supports path planning and querying historical data. Based on the GIS technology of Amap, the system can obtain real-time geographic information data, provide accurate flight path planning and dynamic adjustment, ensure obstacle avoidance, optimize flight routes, and ensure flight safety during the flight process.
By establishing a drone flight simulation platform, the system can simulate the flight status of the drone, provide real-time feedback, and automatically adjust the flight route according to different flight requirements. The experimental results show that the system can effectively improve the accuracy and safety of flight paths, with good user experience and operational convenience.
This study not only demonstrates the integration of GIS technology with unmanned aerial vehicle control systems, but also provides theoretical and technical support for future intelligent control and path optimization of unmanned aerial vehicles.
KEY WORDS: UAV; GIS; SpringBoot; Vue; Gaode Map; MySQL; Flight control; Path planning
目 录
1 绪论
1.1 研究背景和意义
1.2 研究现状
1.3 系统设计思路
1.4 设计方法
2 相关技术介绍
2.1 B/S架构
2.2 Vue技术
2.3 MySQL数据库
2.4 Idea工具
3 系统需求分析
3.1 功能需求分析
3.2 非功能需求分析
3.3 可行性分析
3.3.1 时间可行性
3.3.2 经济可行性
3.3.3 技术可行性
3.4 系统业务流程
4 系统设计
4.1 系统界面设计
4.2 系统总体模块
4.3 E-R图
4.4 数据表设计
5 系统实现
5.1 首页页面
5.2 登录页面
5.3 用户管理页面
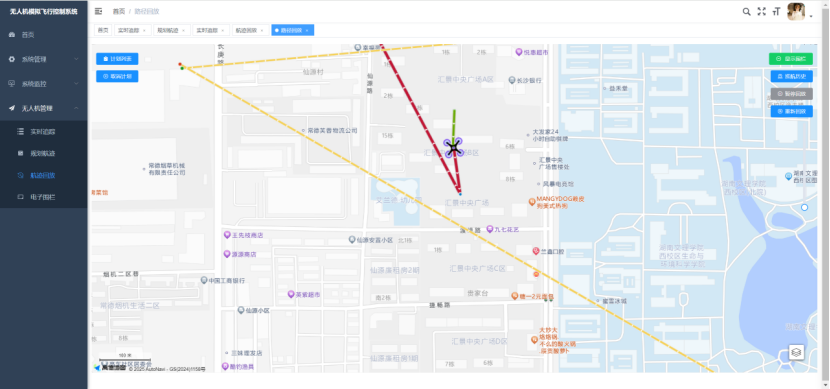
5.4 实时追踪页面
5.5 规划航迹页面
5.6 规划回放页面
6 结论
参考文献
致 谢
随着无人机技术的快速发展,其应用领域已经从军事、安防扩展到农业、环境监测、物流运输等多个行业,成为重要的智能化工具。然而,当前无人机的飞行控制技术仍面临路径规划精度不足、飞行安全性不高、飞行过程实时监控困难等挑战。特别是在复杂的地形环境中,如何高效、精准地规划飞行路径并确保飞行安全,成为无人机技术发展的瓶颈之一。
地理信息系统(GIS)作为一种强大的空间数据处理与分析工具,在无人机飞行控制中的应用具有重要的理论和实践意义。通过GIS技术获取地理空间数据,能够为无人机提供准确的地图信息、地形分析、障碍物检测等功能,进而优化飞行路径,提高飞行效率和安全性。同时,GIS结合无人机的实时飞行数据,可以进行动态路径调整和飞行状态监控,为无人机在复杂环境中的自主飞行提供支持。
本研究旨在设计并实现一个基于GIS的无人机模拟飞行控制系统,系统通过集成SpringBoot、Vue、MySQL以及高德地图等技术,结合先进的飞行控制算法,构建了一个可视化、智能化的飞行控制平台。该系统能够实现无人机飞行路径的精确规划与动态调整,支持飞行过程中的实时监控与数据反馈,进一步提高无人机的飞行性能与安全性。
本研究的意义在于,借助GIS技术的优势,推动无人机自主飞行控制技术的发展,不仅能够满足各类应用场景对飞行精度和安全性的要求,同时也为无人机行业的智能化、自动化飞行控制提供了新的思路和解决方案。此外,基于GIS的无人机飞行控制系统为未来无人机技术的拓展和创新奠定了理论基础,具有广泛的应用前景和研究价值。
近年来,无人机技术在多个行业中得到了广泛应用,尤其是在农业、环境监测、城市规划和灾害救援等领域。无人机的飞行控制系统,尤其是基于GIS的控制系统,已经成为研究的热点。GIS技术能够为无人机提供精确的地理信息支持,通过实时获取地理数据和障碍物信息,有效规划飞行路径、进行动态调整,从而提高飞行精度与安全性。
在国内外,无人机飞行控制系统的研究和应用已经取得了显著进展。例如,美国的DJI(大疆创新)在其商用无人机中,集成了高精度的GPS和地理信息系统,能够在复杂环境中进行高效的路径规划和飞行控制。大疆的Matrice 300 RTK系列无人机,采用了精确的RTK定位系统和高德地图数据,能够为复杂地形和环境提供实时的航线规划和飞行控制。该技术广泛应用于农业植保、航拍勘测等领域,提升了作业效率和数据准确性。
此外,中国科学院遥感与数字地球研究所在无人机飞行控制中也进行了相关研究。该单位开发了基于GIS和遥感数据的无人机路径规划系统,通过融合高精度地形数据和障碍物信息,实现了无人机在复杂地形中的智能飞行。研究表明,基于GIS的无人机路径规划可以显著提高无人机的飞行效率,特别是在多障碍物环境下,能够保证无人机的飞行安全。
国内的中科院地理科学与资源研究所在飞行控制系统的研究上也取得了一定的成果。该研究所结合GIS技术,通过开发智能飞行控制平台,实现了无人机在灾后勘察中的高效路径规划。该平台利用高精度的地形数据和实时影像,帮助无人机避开障碍物并精确完成预定任务。在应用中,该系统展示了GIS技术在灾害应急和环境监测中的重要作用。
另外,华为技术有限公司通过与国内外多个高校和科研机构的合作,推进了基于5G和GIS技术的无人机飞行控制系统研究。华为在2019年发布的AI Drone项目中,结合高精度GIS地图和5G网络,实现了无人机的远程控制和精准路径规划,为农业和物流领域的无人机应用提供了技术支持。
尽管如此,现有的基于GIS的无人机飞行控制系统仍存在一定的局限性。当前的系统多依赖于外部传感器和固定地图数据,缺乏灵活的实时更新机制。此外,系统的智能化水平仍需提升,尤其是在复杂环境中的动态路径规划和自主决策方面。因此,进一步提升飞行控制系统的智能化与实时性,仍是当前研究的关键方向。
总体来说,基于GIS的无人机飞行控制系统已经取得了较为成熟的应用,但在系统优化、智能化控制和大规模应用方面仍存在挑战,未来的研究将继续推动无人机在更复杂环境中的智能飞行。
基于GIS的无人机模拟飞行控制系统设计思路主要围绕如何集成地理信息数据与无人机飞行控制,确保飞行路径的精准性与安全性,具体设计思路如下:
数据采集与集成:系统首先通过高德地图API获取实时地理信息数据,包括地形、障碍物、建筑物等信息。GIS平台将提供详细的地图数据,以帮助无人机了解飞行环境。数据集成模块将高德地图数据与无人机的飞行参数结合,为后续路径规划提供精准的地理参考。
飞行路径规划:基于GIS数据,设计航线规划算法,结合无人机的飞行性能与环境特征,优化飞行路径。系统应具备动态路径调整功能,在飞行过程中根据实时反馈和障碍物数据自动调整路径,确保飞行安全。
飞行控制与模拟:采用SpringBoot框架搭建后端系统,实时接收无人机飞行状态数据,进行飞行控制指令的生成与发送。前端采用Vue框架展示飞行过程,包括飞行路线、飞行高度、速度等信息,并通过高德地图实时显示无人机的当前位置和飞行状态。
实时监控与反馈:系统设计实时监控模块,显示无人机飞行数据及相关地理信息。利用MySQL数据库存储飞行历史记录,为后期分析和优化提供数据支持。前端界面提供用户操作接口,可以动态调整飞行路径并查看飞行状态。
在进行基于GIS的无人机模拟飞行控制系统设计与实现的研究过程中,运用了多种研究方法来指导系统开发与论文撰写。不同的研究方法在解决特定问题时发挥了重要作用。以下是论文过程中采用的几种研究方法:
文献调研法:文献调研法是本研究中不可或缺的步骤。随着无人机技术与GIS技术的不断演进,国内外相关领域的研究成果和技术进展为提供了宝贵的参考。通过查阅大量的文献资料,了解当前无人机控制系统、GIS应用以及飞行路径规划等方面的最新发展,借助已有的理论和技术,避免了重复的研究工作,并有效地指导了本系统的设计和实现。
对比分析法:对比分析法在本研究中起到了至关重要的作用。通过对当前市场上已有的无人机控制系统进行比较,能够清楚地识别出现有系统的优缺点,了解它们在路径规划、飞行控制、数据集成等方面的不足。通过这种对比分析,不仅找到了本系统设计中的创新点,也能够不断调整优化系统功能,提升系统的综合性能和用户体验。
需求调研法:需求调研法是在设计和开发无人机模拟飞行控制系统时的重要步骤。该方法帮助明确了系统目标用户的实际需求,了解不同应用场景下无人机飞行控制的具体要求。通过调研不同领域的用户需求,能够确保系统具有较强的实用性与操作友好性。特别是在飞行控制、路径规划、界面交互等方面,通过调研得到了许多具有指导意义的反馈。
实验验证法:实验验证法是验证系统设计与实现效果的重要手段。在本研究中,通过建立无人机模拟飞行控制环境,进行一系列实验来检验系统的稳定性、准确性与安全性。通过实验验证,能够发现系统中的潜在问题,并及时进行修正和优化,确保系统能够在实际应用中高效、稳定地运行。实验数据为系统改进提供了重要依据,也为论文的结论提供了有力支持。
通过这些研究方法的运用,能够更全面、深入地理解问题,确保系统设计与论文写作的高效性与科学性。
从用户角度来看,由于飞行控制和路径规划的复杂计算均由后端服务器完成,用户的设备配置要求较低,只需要一台能够运行浏览器的设备即可,无论是PC端还是移动设备都能够顺畅访问系统。这大大减轻了用户硬件要求的负担,使得系统具备了更广泛的适用性。
此外,用户无需额外安装任何软件,只需通过浏览器输入系统的访问地址,即可随时随地进行操作。这种“即开即用”的便利性极大提升了系统的易用性,尤其对于无人机操作人员和相关工作人员而言,操作变得更加简便,能够快速投入使用,无需繁琐的安装过程。因此,基于B/S架构的设计不仅为无人机模拟飞行控制系统的使用带来了便利,也为后续的系统扩展和更新提供了更高效的解决方案。
Vue.js是一款轻量级的前端框架,因其简单、灵活且高效的特性,在基于GIS的无人机模拟飞行控制系统中发挥了重要作用。在本系统中,Vue被用于构建用户界面的前端部分,通过与后端系统的紧密配合,实现了飞行数据的实时展示与交互。
Vue.js的响应式数据绑定特性使得系统能够实时更新飞行数据和地图信息。当无人机的飞行状态发生变化时,Vue会自动更新界面,展示当前的飞行位置、速度、高度等信息,保证用户可以即时掌握飞行状态。
Vue与高德地图API的结合,使得飞行路径和实时位置能够在地图上动态展示。用户可以通过Vue前端界面方便地查看无人机的飞行轨迹及相关地理信息,提供直观的飞行监控体验。
Vue的组件化开发方式提高了系统的开发效率和可维护性。每个功能模块(如地图、飞行状态展示、用户操作界面)都被封装成独立的组件,便于开发、测试和后期维护。
总之,Vue.js在系统中的应用使得前端开发更加高效、灵活,同时提供了优良的用户体验,为基于GIS的无人机飞行控制系统的实现提供了强有力的支持。
MySQL数据库作为一种开源的关系型数据库管理系统,在基于GIS的无人机模拟飞行控制系统中发挥了重要作用。系统通过MySQL存储与管理飞行数据、用户信息、地理数据以及系统日志等各类信息,确保数据的高效存储与快速访问。
系统使用MySQL存储无人机的飞行状态数据,包括飞行高度、速度、位置坐标、飞行时间等重要信息。每次飞行状态的变化都被实时记录,并存入数据库中,以供后续分析和优化。此外,飞行路径数据也被保存在数据库中,便于用户查询历史飞行记录和对比不同航线的飞行效果。
MySQL数据库还用于存储用户信息及权限管理。通过数据库的表格设计,系统能够有效地管理不同用户的操作权限,确保系统的安全性与可靠性。例如,管理员可以对飞行数据进行管理与查看,而普通用户则只能访问部分功能。
数据库的高性能查询能力保证了系统在实时处理大量飞行数据时的响应速度。通过优化索引和查询语句,MySQL能够高效支持系统中的实时数据交互,确保飞行监控和路径规划的准确性。
总之,MySQL数据库在本系统中的应用,提供了稳定的数据存储支持,为无人机飞行控制系统的高效运行奠定了基础。
在基于GIS的无人机模拟飞行控制系统的设计与实现过程中,IDEA(IntelliJ IDEA)作为主要的开发工具,提供了高效的开发环境和强大的功能支持。IDEA是一款集成开发环境,广泛应用于Java及其他编程语言的开发,特别适合用于构建复杂的后端系统。
IDEA的智能代码补全和语法高亮功能大大提高了开发效率。在开发过程中,IDEA能够自动提示函数、变量等内容,并实时检测代码中的错误,帮助开发人员快速定位问题。这对于系统的复杂逻辑开发和调试非常有帮助。
IDEA的强大调试工具为系统的调试和优化提供了便利。通过IDEA的断点调试功能,开发人员能够实时监控系统执行过程中的各项参数,迅速发现潜在的性能瓶颈或逻辑错误。在开发无人机模拟飞行控制系统时,调试过程尤为重要,IDEA的调试工具显著提升了开发的准确性与效率。
IDEA与Git版本控制系统的完美集成使得团队协作更加顺畅。通过IDEA的Git插件,开发人员能够轻松进行代码的版本管理和协作开发,确保项目的顺利进行。
总的来说,IDEA作为开发工具,在系统的开发过程中提供了智能化、便捷化的支持,极大地提升了开发效率和代码质量。
本系统设计的功能模块旨在提供完整的无人机飞行控制与管理服务,满足用户对无人机操作、监控及数据管理的多种需求。首先,首页作为系统的入口页面,需展示系统的整体状态,包括当前无人机的飞行信息、操作日志以及系统通知等,提供用户清晰的导航和快速进入各功能模块的入口。
在系统管理模块中,管理员需要对系统进行配置管理、权限控制和数据备份等操作,确保系统的稳定运行和数据安全。系统监控模块负责实时显示无人机的飞行状态,包括飞行高度、速度、位置等信息,支持实时报警和异常检测,确保飞行的安全性。
无人机管理功能允许用户对无人机进行基本信息管理,包括设备配置、状态监控和故障诊断。实时追踪模块则提供无人机当前位置的实时定位,并在地图上显示其飞行轨迹,支持用户快速查询无人机的当前状态和历史飞行路径。
规划航迹模块允许用户为无人机设计飞行路径,基于GIS地图数据进行路径规划,并支持动态修改与优化航线。航迹回放功能则帮助用户回顾无人机的历史飞行轨迹,便于数据分析和问题排查。
最后,电子围栏功能能够设置无人机的飞行区域,超出指定区域时系统会自动报警,保障飞行安全。所有模块的协同工作使得系统具备全面的无人机飞行管理能力,确保飞行任务的高效和安全执行。
在基于GIS的无人机模拟飞行控制系统的设计与实现中,非功能需求涉及系统性能、可靠性、安全性、可用性等方面,确保系统在实际应用中的高效和稳定运行。
性能需求是系统设计的重要方面。系统需要支持多用户同时访问,确保无人机飞行数据的实时传输与更新。飞行状态信息、地图数据和路径规划等关键功能应保证在毫秒级响应时间内完成,以保证用户操作的流畅性与实时性。系统需具备处理大量数据的能力,尤其是在无人机进行长时间飞行时,能够持续进行高效的数据处理和存储。
可靠性需求要求系统在不同的运行环境下保持稳定运行。系统应具备容错能力,能够在出现硬件故障、网络中断等意外情况下自动恢复,确保无人机飞行任务的安全完成。此外,系统应定期进行备份,防止数据丢失。
安全性需求至关重要,尤其是在无人机的飞行控制中。系统应对用户进行身份验证,并控制访问权限,防止未授权的用户进行敏感操作。所有通信数据需采用加密技术,避免数据泄露或篡改。
可用性需求要求系统具有良好的用户界面设计,简洁易用,支持多平台访问,包括PC端和移动端。此外,系统应提供详尽的帮助文档和用户支持,确保用户能够快速上手并顺利使用系统。
这些非功能需求为系统的实际部署和运行提供了保障,确保系统具备高效、安全、稳定的操作环境。
对于毕业设计而言,首先必须确保的是时间可行性,这是项目能否顺利完成的关键因素。尽管项目设想和目标理想,但如果开发周期超过两到三年,并且需要大量专业团队的支持,那么这样的时间可行性就会受到质疑。时间可行性指的是完成项目所需的时间框架。如果能够在规定的时间内完成任务,那么项目就是可行的;反之,如果超出预定时间,项目的实施就变得不可行。
对于基于GIS的无人机模拟飞行控制系统的设计与实现,必须在合理的时间内完成开发与部署,确保每个阶段的任务都能够在预定时间内进行。过长的开发周期不仅会影响项目的进度,还可能引入不可控的外部因素,导致项目无法按时交付。因此,在制定开发计划时,必须考虑各个环节的时间需求,确保系统能够在既定的时间内顺利完成所有开发与测试工作,最终实现预期目标。
在制定可行性方案时,必须避免使用商业化的数据库或开发语言,因为这些工具通常会产生额外的费用,而毕业设计的预算通常无法支持这些开销。因此,必须选择开源工具和免费的技术栈,以确保项目在预算范围内可实现。
经济可行性是毕业设计实施过程中首要考虑的因素,旨在用有限的资金完成预定的业务需求。实际上,在实现项目目标时,完全没有必要依赖商业化的软件和平台。选择非商业化的解决方案不仅可以有效控制成本,而且能确保项目的顺利推进。作为学生,有限的资金资源决定了不可能承担过高的费用,因此必须确保所选择的技术方案具有可承受性,以便在既定的预算内完成项目的各项功能。
技术手段是否能够顺利达成目标的能力。在基于GIS的无人机模拟飞行控制系统的设计与实现中,所采用的技术基本上是学生在学术课程中已经掌握的技能,这意味着解决技术难题的资源和方法都较为容易获得。使用的技术都是经过深思熟虑的,具有较高的普适性和成熟度。
为了确保项目的顺利实施,选择开源的技术栈显得尤为重要。如果使用的是商业化技术或闭源工具,项目实施的难度和成本都会大幅提高,甚至可能阻碍项目的顺利进行。因此,采用开源的开发语言和工具,不仅能够降低成本,还能减少后期实施中的技术难题。通过使用开源技术,开发者可以方便地获得社区支持,快速解决技术问题,从而大大提升项目的技术可行性,确保系统能够按计划顺利开发和部署。
业务流程的设计主要依据实际需求进行规划,从业务角度来看,不同行业和不同应用场景会有各自独特的需求。然而,从计算机系统的角度来看,业务流程的核心就是对有效数据进行增、删、改、查等操作。在基于GIS的无人机模拟飞行控制系统中,当用户或系统需要新增飞行任务、无人机信息等数据时,便需要采用数据增加的流程。
具体而言,新增的业务流程通常包括用户输入信息,系统对这些信息进行有效性验证。验证通过后,数据将被保存到数据库中。验证的过程包括格式检查、必填字段验证、以及与已有数据的冲突检查,确保数据的准确性和完整性。通过这一流程,系统能够保证新增信息的有效性,为后续的飞行控制和监控提供可靠的数据支持。
该流程的具体操作可以通过业务流程图进行可视化展示,帮助开发人员清晰地理解每个步骤的执行顺序和逻辑关系,确保系统能够高效、稳定地处理新增信息。
在修改流程中,一方面需要准备好待修改的数据,另一方面也要确保数据库中对应记录的标识符(如ID)正确配置。与新增操作不同,修改操作并不是直接插入数据,而是基于现有数据进行更新。因此,修改流程需要先定位到具体的数据记录,并进行必要的修改,确保系统能够准确更新数据库中的相应内容。
在基于GIS的无人机模拟飞行控制系统中,修改流程通常涉及到飞行任务、无人机状态等信息的更新。当用户需要对已有数据进行更改时,系统会先通过修改ID找到对应的数据库记录,然后验证新的数据是否符合要求。一旦验证通过,系统便会更新数据库中的相应字段,确保数据的一致性和完整性。
与新增数据流程不同,修改操作需要格外注意数据的准确性和完整性,以避免产生数据冲突或错误。修改后的信息需要经过再次验证,以确保系统的稳定运行。业务流程图可以清晰地展示该过程的各个环节,帮助开发者理解流程中的每个步骤,确保系统按预期进行数据更新。