具身智能竞速时刻,百度百舸提供全栈加速方案
2025年,全球具身智能赛道迎来快速发展期,技术方向日益清晰。每一家企业都面临着同样的核心命题:如何将前沿的模型能力,转化为在真实世界各类场景中可规模化应用落地的机器人产品?
这背后,是研发团队对模型迭代速度的极致追求。企业亟需突破算力瓶颈、简化工程复杂性、缩短从数据到部署的闭环周期。百度百舸·AI 异构计算平台,致力于成为具身智能企业加速大模型落地、赢得市场先机的关键支撑。

1. 百度百舸:为具身智能研发打造超级加速引擎
百度百舸·AI异构计算平台,基于「极致训推加速 + 一站式开发平台 + 全栈工具链」的综合能力体系,为具身智能企业提供从研发到部署的全周期加速支持,旨在全面提升视觉语言模型 VLM、世界模型 WM、视觉语言动作模型 VLA 等各类模型的训练与迭代效率。
1.1. 高性能算力与极致优化:AIAK 赋能训推加速
百舸依托强大的算力基础设施,并通过自研 AI 加速套件 AIAK(AI Acceleration Kit)进行深度工程优化,针对具身智能主流模型提供显著性能提升:
VLM 模型:针对 VLM 模型训练,AIAK 在多模态数据处理(如数据 Packing、图文视频混训、多轮对话支持)、长序列显存管理(序列并行、高效显存策略)以及模型并行策略(混合切分,保障负载均衡)等方面进行了深度优化,训练性能相比社区版本最高提升 40 %以上。
WM 模型:训练性能相比社区版本最高提升 20% 以上,推理性能相比于社区版本提升 36% 以上。
VLA 模型:云厂商第一家全面适配 RDT、π0 和 GR00T N1.5 等三大开源具身 VLA 模型,为 VLA 等提供高性能的算力底座和优化的运行环境,全面支撑其高效迭代。
1.2. 一站式开发平台:覆盖「开发-训练-仿真-部署」全链路
百舸提供覆盖研发全周期的一站式服务,无缝衔接各个环节:
开发和训练:开发机内置主流开发工具和具身智能开发环境,支持 GPU 虚拟化、关机重启数据不丢等,实现了高效能的云端开发。同时,开发机无缝集成训练环节,支持在线构建打包镜像,并进行一键提交。训练过程中,百舸平台可以支持万卡集群 99.5% 的有效训练时长。
仿真测评:支持主流仿真环境的一键部署,助力模型在高保真虚拟环境中进行高效、大规模的性能测评与验证。
推理部署:提供主流具身 VLA 模型的推理脚本,支持部署在本地环境,便于开发者快速验证上机效果。
1.3. 全栈工具链:为具身智能研发提供开箱即用的能力
百舸提供覆盖具身模型训练到仿真验证的全栈工具链,显著降低企业技术探索门槛,加速研发进程:
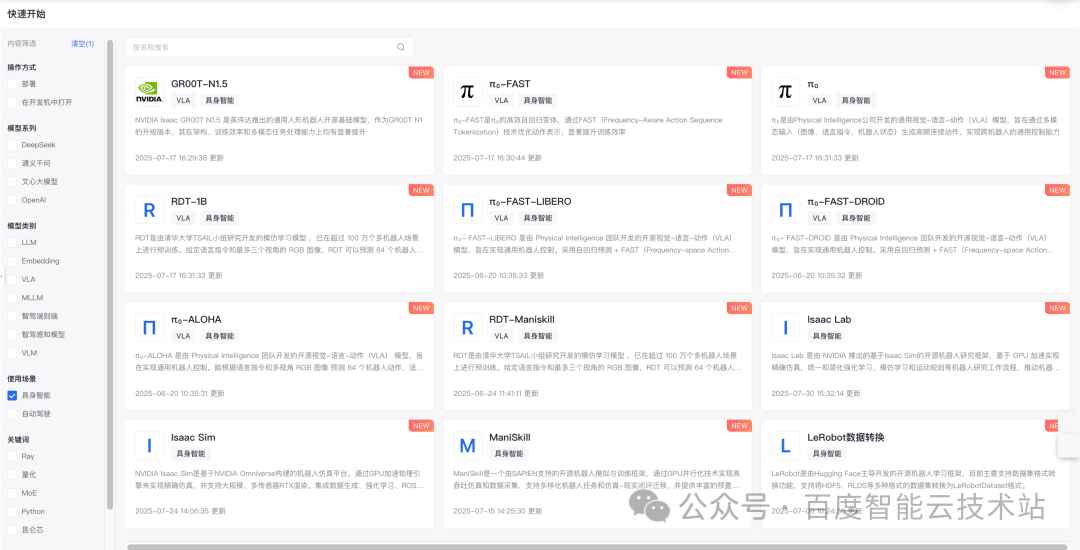
业界领先模型支持:作为国内首家全面适配三大主流开源 VLA 模型的云厂商,百舸内置 RDT、π0、Isaac GR00T 等模型的预置训练模版。算法工程师可直接基于模版进行开发,无需从零搭建,快速开启 VLA 技术路线探索。
高保真仿真与数据闭环:集成 NVIDIA Isaac Sim 等仿真平台,支持高保真合成数据生成,并打通「仿真-实机」数据联动,持续优化运动控制算法(如人形机器人动态平衡),加速任务泛化能力的实现。
预置数据集:平台已预置主流的高质量仿真数据集,让开发者能够快速获取高质量训练数据,立即启动模型训练与验证,显著降低研发的启动门槛。
2. 客户成功:从实验室创新到规模化应用的巨大潜力
百度百舸平台正被广泛应用于国内具身智能领域的前沿研究与产品开发,服务了包括北京人形机器人创新中心等在内的多家行业领跑企业。
8 月 9 日,在2025世界机器人大会(WRC)期间,由北京人形机器人创新中心(国地共建具身智能机器人创新中心,以下简称「北京人形」)主办,百度智能云支持的「具身智能技术与应用论坛」成功举办。
北京人形在论坛现场正式发布了 4 项具身智能核心成果:「具身世界模型体系」打通认知与预判能力,「跨本体 VLA 模型」实现跨本体、多场景、多技能的通用性,「人形机器人全身控制自主导航系统」解决移动与操作协同的执行瓶颈,「千台机器人真实场景数据采集计划」为具身智能机器人持续进化提供规模化数据燃料。这 4 项成果共同构成了从「最能跑」到「最好用」的技术闭环,加速具身智能从技术突破迈向产业实用。
其中,在具身世界模型和 VLA 模型的研发上,百度百舸平台助力北京人形的具身模型开发工作全面提效。
3. 结语
在具身智能的赛道上,领先的模型是武器,而高效的工程平台是战车。百度百舸不只提供算力,更通过深度的工程优化和全栈的工具支持,打造了一台驱动具身模型研发飞速前进的超级加速引擎。
百度百舸致力于让具身企业的 AI 算法团队,在百度提供的稳定可靠、强大易用的 AI 基础设施之上,更聚焦、高效地开展 VLM、WM、VLA 等先进技术研发,加速具身智能机器人的规模化应用落地。