【MATLAB例程】基于UKF的IMM例程,模型使用CA(匀加速)和CT(协调转弯)双模型,二维环境下的轨迹定位。附代码下载链接
本文介绍的MATLAB程序可以实现:基于交互式多模型(IMM)的无迹卡尔曼滤波(UKF)方法,用于二维平面中目标的运动状态估计。该算法结合了两个运动模型:匀速直线模型(CV)和匀速转弯模型(CT),可在不同运动模式间自适应切换,从而提高目标跟踪精度。
文章目录
- 程序详解
- 🧠 程序核心思想
- 📊 主要功能模块
- 运行结果
- MATLAB源代码
程序详解
🧠 程序核心思想
在目标跟踪问题中,由于目标可能存在不同的运动模式(如直线、转弯等),单一模型很难始终适应。IMM算法通过在多个运动模型间加权融合预测结果,并实时调整模型权重,提升整体滤波鲁棒性和精度。
在每一步滤波中,IMM流程如下:
- 模型交互(混合):基于前一时刻模型概率和转移矩阵计算混合初始状态。
- 状态预测:每个模型独立进行 UKF 预测。
- 观测更新:每个模型基于当前观测进行 UKF 校正,得到各自的状态估计和置信度。
- 模型概率更新:根据每个模型的观测匹配程度(似然)更新模型概率。
- 估计融合:加权融合所有模型的状态估计,得到当前最终估计值。
📊 主要功能模块
- 模拟真实轨迹
- 单模型 UKF 滤波
- IMM UKF 滤波
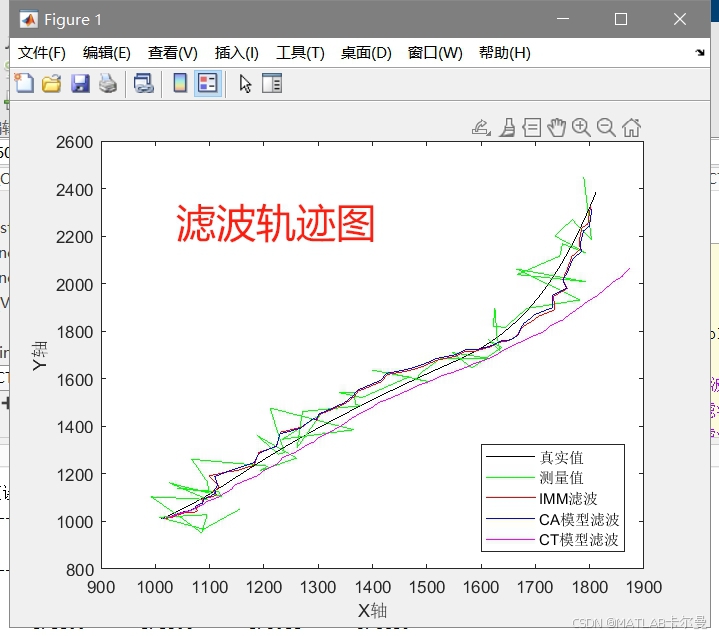
运行结果
轨迹真值与不同方法得到的对比:
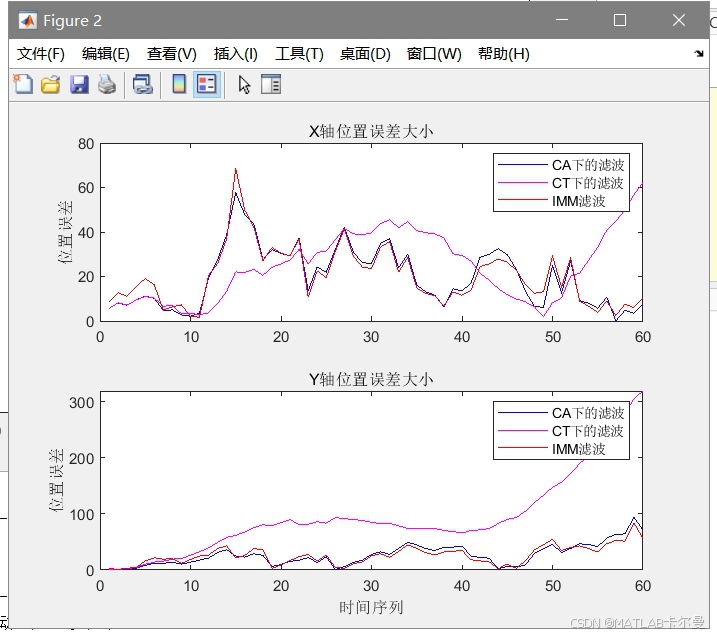
位置误差对比曲线:
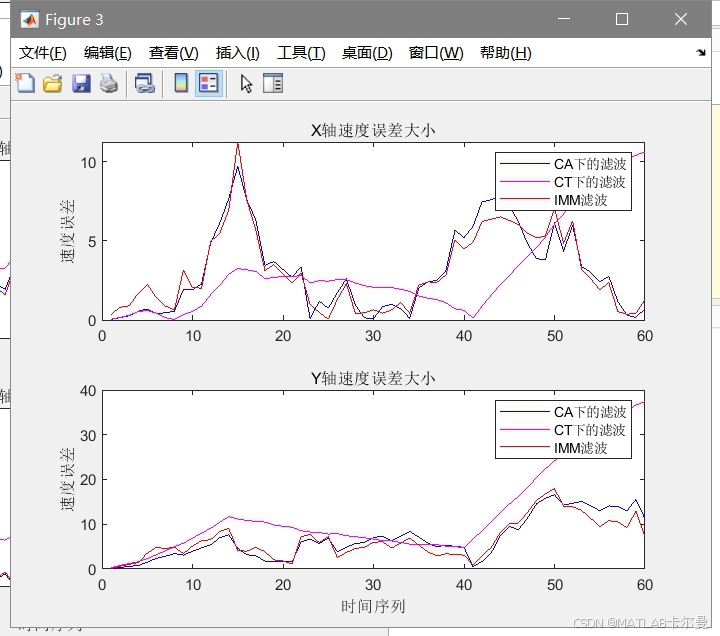
速度误差对比曲线:
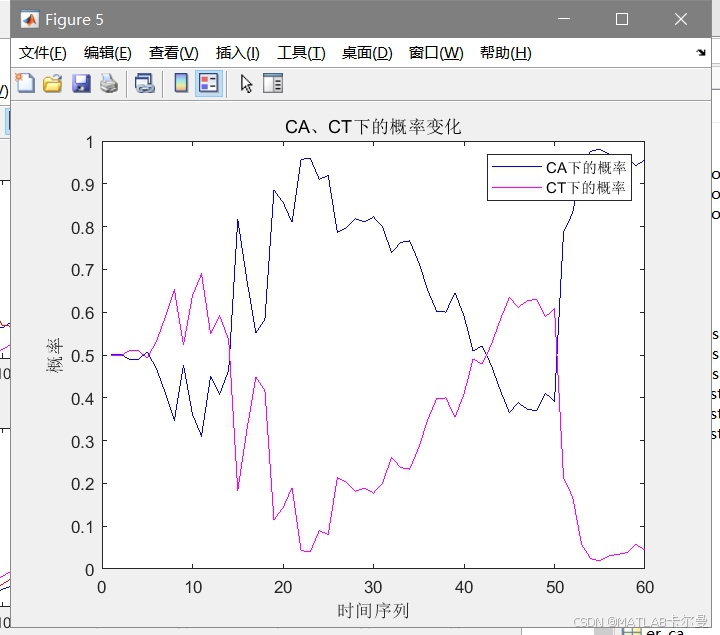
模型的概率曲线:
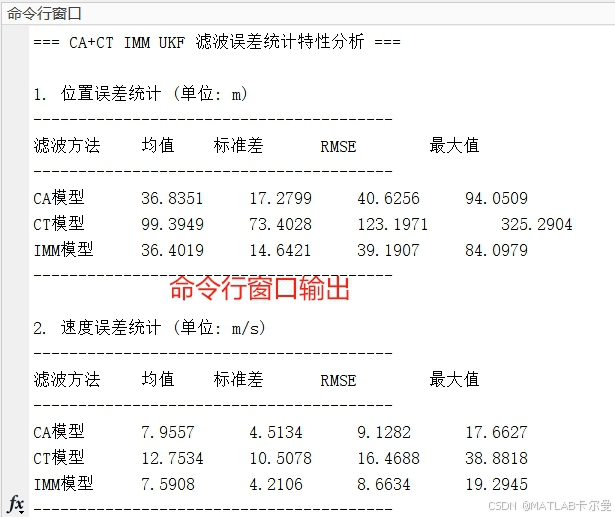
命令行窗口输出的误差统计特性对比:
MATLAB源代码
部分代码如下:
% CV和CT模型组成的IMM UKF
% 2024-11-06/Ver1
% 2025-08-07/Ver2:添加误差统计特性计算与输出、优化非线性情况下的权重更新
%% 建模
clear; %清空工作区
clc; %清空命令行
close all; %关闭所有窗口(主窗口除外)
rng(0); %固定随机种子,让每次运行得到的结果相同
N = 600; %定义仿真时间为600
T = 1; %定义采样间隔为1
x0 = [1000,10,1000,10]'; %状态初始化,四项为别为x轴位置、速度、y轴位置、速度
xA = []; %预定义输出的状态
% CV匀速运动
% x = A1*x + G1*sqrt(Q1)*[randn,randn]';
A1 = [1,T,0,0;0,1,0,0;0,0,1,T;0,0,0,1]; %定义匀速运动时的状态转移矩阵
G1=[T^2/2,0;T,0;0,T^2/2;0,T] ; %设置匀速运动时的输入向量转移矩阵
Q1=0.01*diag([1,1]); %设置状态转移协方差矩阵
% CT匀速圆周运动
A2=CreatCTF(-pi/360,T); %设置匀速圆周运动时的状态转移矩阵
G2=CreatCTT(T); %设置匀速圆周运动时的输入向量转移矩阵
Q2=0.144^2*diag([1,1]); %设置匀速圆周运动时的% 产生真实数据
x = x0; %在迭代产生真值前,给x赋初值
for k = 1:140%匀速直线x = A1*x + G1*sqrt(Q1)*randn(size(Q1,1),1); %状态一步转移,后面的是误差xA =[xA x]; % 将迭代得到的x加在xA后面一列
end
for k = 1:260%匀速圆周转弯x = A2*x + G2*sqrt(Q2)*randn(size(Q2,1),1); %状态一步转移,后面的是误差xA =[xA x]; % 将迭代得到的x加在xA后面一列
end
for k = 1:N-400%匀速直线x = A1*x + G1*sqrt(Q1)*randn(size(Q1,1),1); %状态一步转移,后面的是误差xA =[xA x]; % 将迭代得到的x加在xA后面一列
end
完整代码的下载链接:
https://download.csdn.net/download/callmeup/91611532
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者